技术特征:
1.一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,包括如下步骤:s1,根据控制需求以及参与控制的执行器选定系统状态和控制输入,搭建整车模型,通过辨识执行器的动态特性,并针对线控底盘的执行器动态特性进行建模;s2,以功能或具体执行器配置为依据,将所述整车模型划分为多个子模块模型,将所述执行器动态特性引入所述子模块模型中,完成封装建模;s3,针对各个子模块模型,构造本地最优控制问题,基于预设的更新律,通过交换子模块间的扰动量迭代求解全局最优解,实现对线控底盘执行器的模块化控制。2.根据权利要求1所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,所述的s3中包括如下步骤:s31,根据子模块的动态特性与执行频率,选取离散步长进行离散处理;s32,构建本地代价函数,构造本地最优控制问题并求解得到子模块的扰动量;s33,通过交换子模块间的扰动量,基于预设的更新律,在迭代收敛后输出全局最优解,实现对线控底盘的模块化控制。3.根据权利要求2所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,所述的s33包括如下步骤:s331,在某一时刻t0,对于子模块i,测得状态量执行器的控制输入量和扰动量上一时刻得到的扰动量序列为迭代次数q=1,其中n
p
表示预测时域;s332,基于所述本地代价函数计算本地代价j
i
,求解得到控制量序列并将本模块的贡献量序列发送给其他子模块其中为引入执行器动态特性后的输入增广矩阵;s333,获取其他子模块的贡献量序列基于预设的更新律计算新的扰动量s334,若则q=q 1,执行步骤s332,若或q>q
max
,则输出全局最优解,即控制量序列中的第一项作用于系统,实现对线控底盘的模块化控制,其中ε、q
max
为预设参数。4.根据权利要求2所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,所述的本地代价函数为:于,所述的本地代价函数为:于,所述的本地代价函数为:于,所述的本地代价函数为:其中,j
i
表示子模块i的本地代价,表示系统状态的参考值,表示控制量增量,
r
x
、r
δu
、r
u
分别表示各目标项分配的权重因子,分别表示系统状态的上下限,分别表示控制量增量的上下限,分别表示控制量的上下限,n
p
表示预测时域。5.根据权利要求2所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,各个子模块模型通过各自的通信接口实现扰动量的交换。6.根据权利要求1所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,针对执行器动态特性进行建模的数学模型满足的状态方程为:y
p
=x
p
其中,τ
p
为时间常数,θ
p
为死区时间,x
p
为对应执行器的状态量,u
p
为对应执行器的控制输入。7.根据权利要求1所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,所述的整车模型满足的状态方程为:其中,x
cog
为整车级别的状态量,u
cog
为整车级别的控制输入,w
cog
为整车级别的系统扰动,a为系统矩阵,b为控制矩阵。8.根据权利要求7所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,由整车模型划分为多个子模块模型满足的状态方程为:其中,x
cogi
=x
cog
,a
i
=a,x
cogi
为模块的状态量,u
cogi
为模块的控制输入,w
cogi
为模块的扰动量,w
cog
为整车级别中的不可测扰动,为其他子模块的贡献量,输入矩阵9.根据权利要求8所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在于,将所述执行器动态特性引入子模块模型后,子模块模型满足的状态方程为:其中,c
pi
=1,τ
pi
为第i个子模块的时间常数,为模块的增广状态量,和分别为变换后状态方程的状态增广矩阵和输入增广矩阵,a
pi
、b
pi
、c
pi
分别为执行器数学模型的状态矩阵、输入矩阵和输出矩阵。10.根据权利要求8所述的一种考虑执行器特性的线控底盘模块化控制方法,其特征在
于,所述的更新律为:其中,表示第i个子模块在第q次迭代下[1-n
p
]内的扰动量序列,α为预设参数。
技术总结
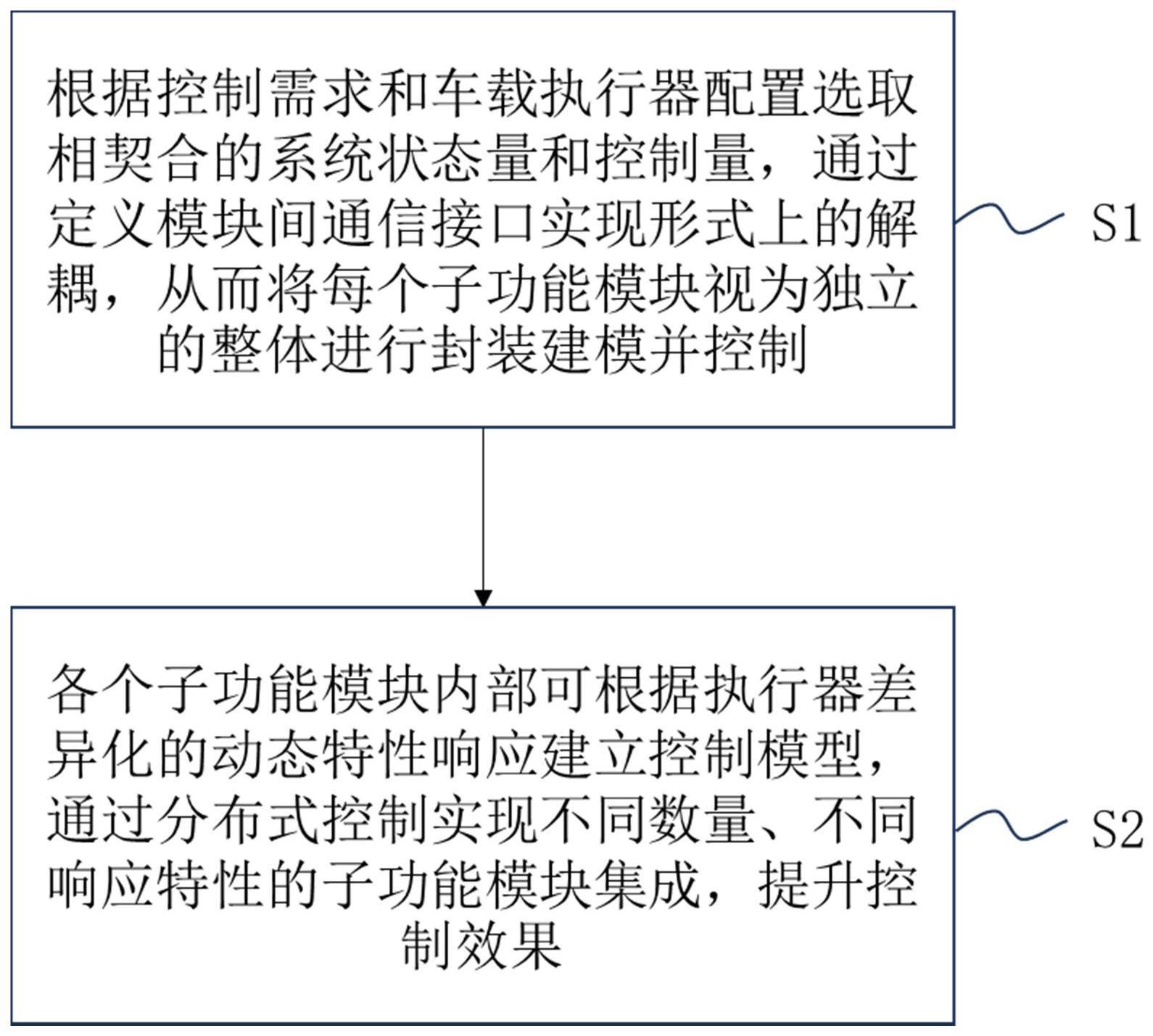
本发明涉及一种考虑执行器特性的线控底盘模块化控制方法,包括以下步骤:根据控制需求和车载执行器配置选取相契合的系统状态量和控制量,通过定义模块间通信接口实现形式上的解耦,从而将每个子功能模块视为独立的整体进行封装建模并控制;各个子功能模块内部可根据执行器差异化的动态特性响应建立控制模型,通过分布式控制实现不同数量、不同响应特性的子功能模块集成,提升控制效果。与现有技术相比,本发明通过分布式的控制集成方法,控制算法可根据控制需求和执行器配置快速重构,提高了系统面向模块化线控底盘的集成效率和可扩展性,以及控制系统面对突发故障时的鲁棒性。以及控制系统面对突发故障时的鲁棒性。以及控制系统面对突发故障时的鲁棒性。
技术研发人员:唐辰 周凡楷 吕浩然 熊璐
受保护的技术使用者:同济大学
技术研发日:2023.07.28
技术公布日:2023/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。