-

一种基于尾鳍成纤维细胞培养的鲫鱼染色体核型分析方法与流程
本发明涉及染色体核型分析,具体涉及一种基于尾鳍成纤维细胞培养的鲫鱼染色体核型分析方法。背景技术:1、鲫鱼隶属于鲤形目、鲤科、鲫属,因其肉质细嫩、味道鲜美、营养丰富,即可食用又可药用,深受大众推崇,具有......
-
基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统
本发明涉及仿生水下推进及水下机器人,尤其是涉及基于苏格兰轭的尾鳍快速摆动推进仿生水下机器人系统。背景技术:1、仿生水下机器人,例如尾鳍推进仿生水下机器人等,相较于传统螺旋桨推进机器人游动更敏捷且灵活性......
-
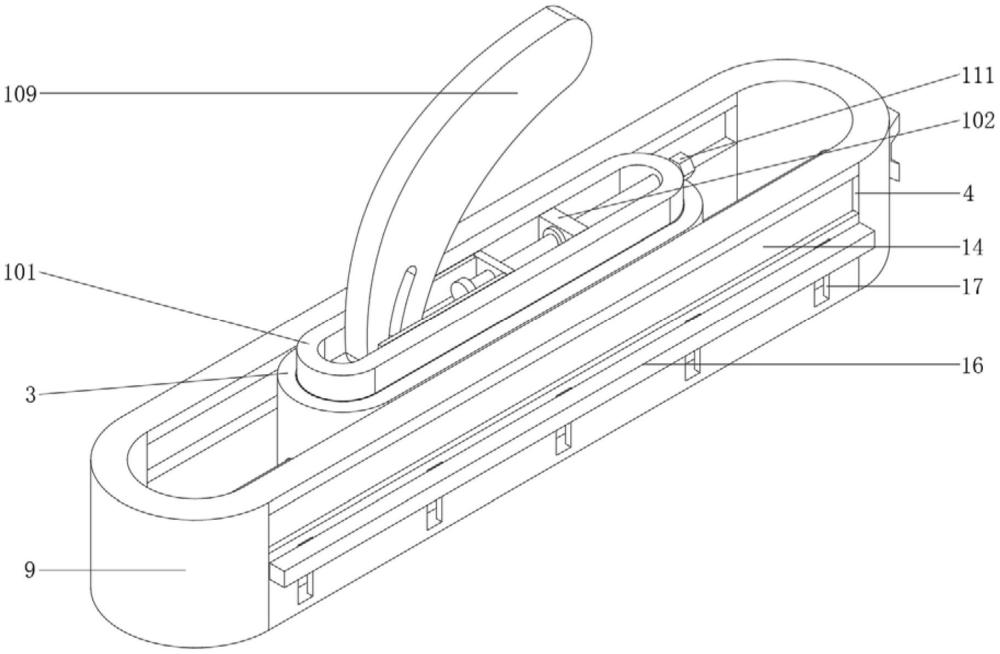
一种冲浪板用便于更换的尾鳍的制作方法
本技术涉及冲浪板,具体为一种冲浪板用便于更换的尾鳍。背景技术:1、冲浪板是一种专门用于冲浪运动的器材,它的设计和尺寸会根据使用者的体重、冲浪的浪况以及个人的体力技术有所不同。一般来说,体重越重的人需要......
-
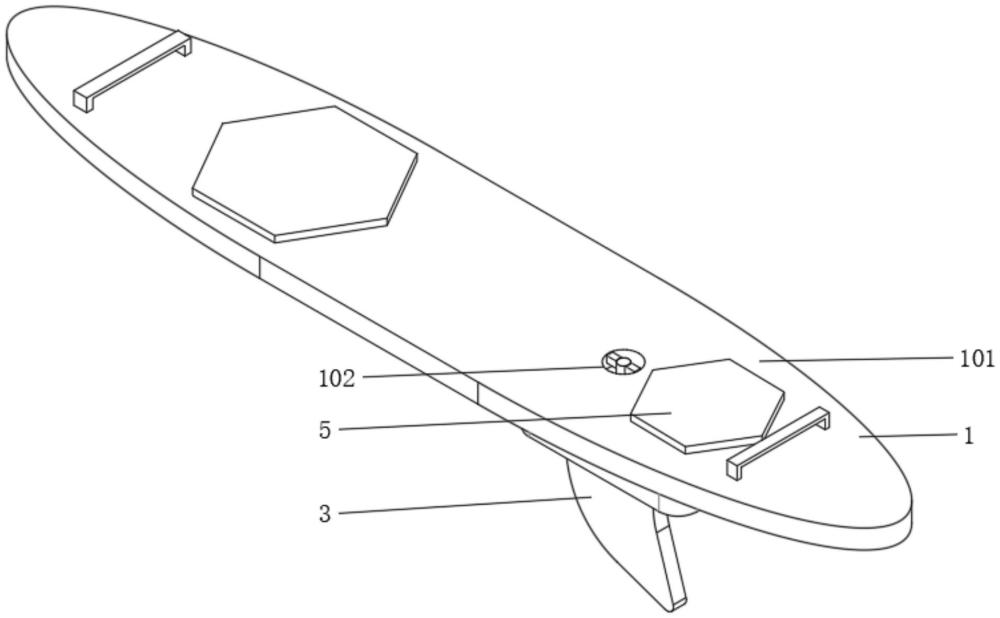
一种可拆装尾鳍的冲浪板的制作方法
本技术属于冲浪板,具体为一种可拆装尾鳍的冲浪板。背景技术:1、冲浪运动是运动员站立在冲浪板上,或利用腹板、跪板、充气的橡皮垫、划艇、皮艇等驾驭海浪的一项水上运动。不论采用哪种器材,运动员都要有很高的技......
-
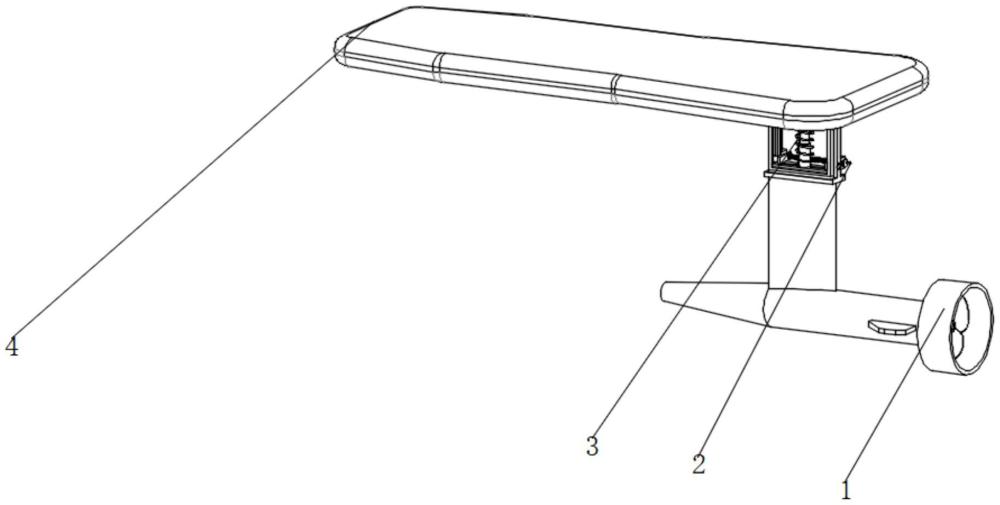
一种桨板用可变尾鳍的制作方法
本技术属于桨板用尾鳍,具体为一种桨板用可变尾鳍。背景技术:1、冲浪运动需要用到桨板,桨板中的尾鳍类似于鱼类的鱼鳍,安装在桨板尾部底侧,在进行水上冲浪滑行时起到稳定方向的作用。2、尾鳍对桨板行进的速度、......
-
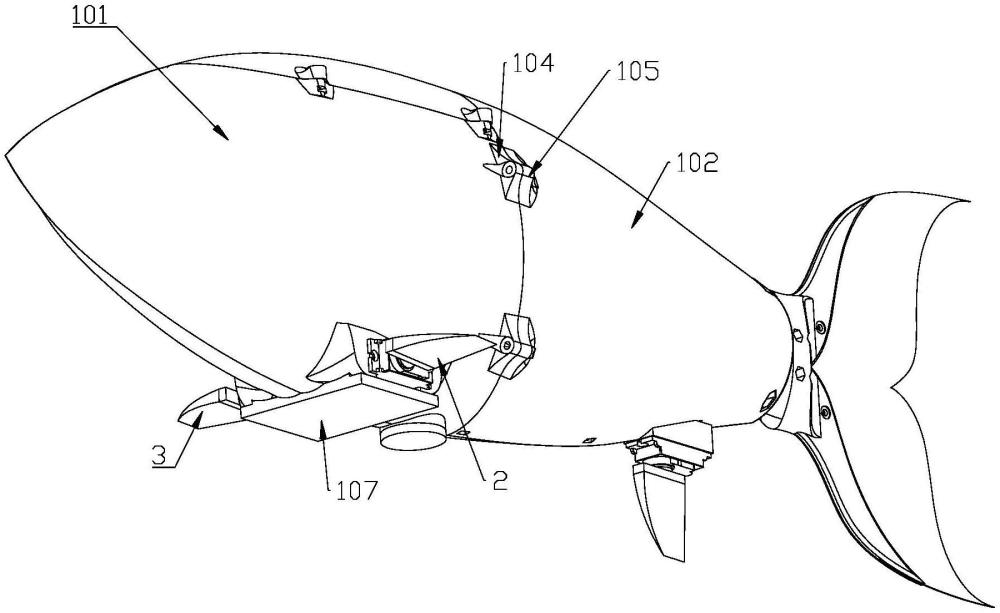
一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法
本发明属于生物机器人、水下机器人领域,尤其涉及一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法。背景技术:1、现有的仿生鱼形机器人主要可以分为以下金鱼型仿生机器人、鲫鱼型仿生机器人、鳐鱼型仿生机器人等......
-

一种用于冲浪板的尾鳍的制作方法
本技术涉及冲浪板,尤其涉及一种用于冲浪板的尾鳍。背景技术:1、冲浪板尾鳍是冲浪板的重要配件之一,其主要作用是使冲浪板具有一定的灵活性和循线性,使冲浪者在冲浪板上可以控制和稳定方向。2、现有的冲浪板尾鳍......
-
一种可快速拆卸尾鳍装置的制作方法
本技术涉及一种尾鳍装置,尤其涉及一种可快速拆卸尾鳍装置。背景技术:1、随着我国社会的进步和科技的发展,我国国民的生活水平不断提高,越来越多的人喜欢上水上运动作为娱乐健身的活动方式,随着互联网的传播,冲......
-

一种基于IPMC尾鳍驱动的小型机器鱼
本发明专利属于软体机器人领域,具体涉及了一种基于ipmc智能材料驱动的小型机器鱼开发。背景技术:1、离子聚合物-金属复合材料(ipmc)是一种智能材料,通常是以nafion为基体膜,然后通过物理或化学......
-
基于低熔点热塑材料的变刚度仿生尾鳍及水下机器人
本发明涉及水下机器人,尤其涉及一种基于低熔点热塑材料的变刚度仿生尾鳍及水下机器人。背景技术:1、水下机器人已经成为人们海洋勘探与水下作业的重要工具。其中,仿生机器鱼不同于传统的以螺旋桨推进器作为驱动的......
-
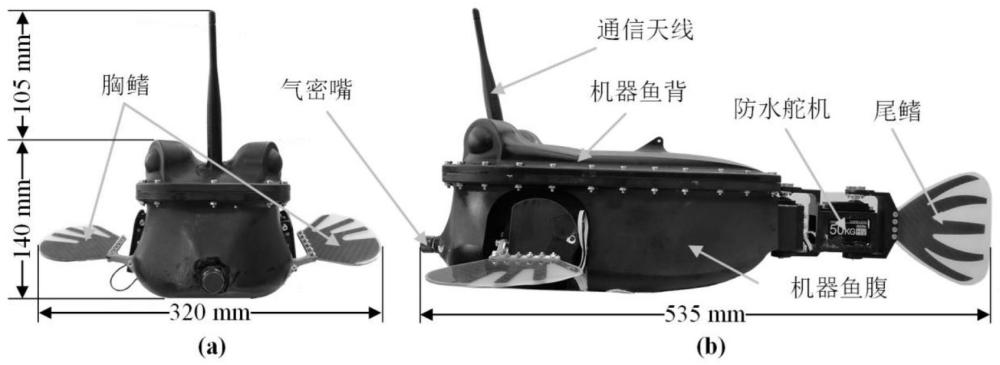
一种胸鳍和尾鳍协同推进的仿生机器鱼及其控制方法
本发明属于仿生水下机器人应用,涉及到包括外形结构设计、驱动系统、通信系统和控制算法在内的仿生机器鱼的整体样机设计,具体涉及一种胸鳍与尾鳍协同推进的仿生机器鱼及其控制方法。背景技术:1、在河流和海洋等水......
-
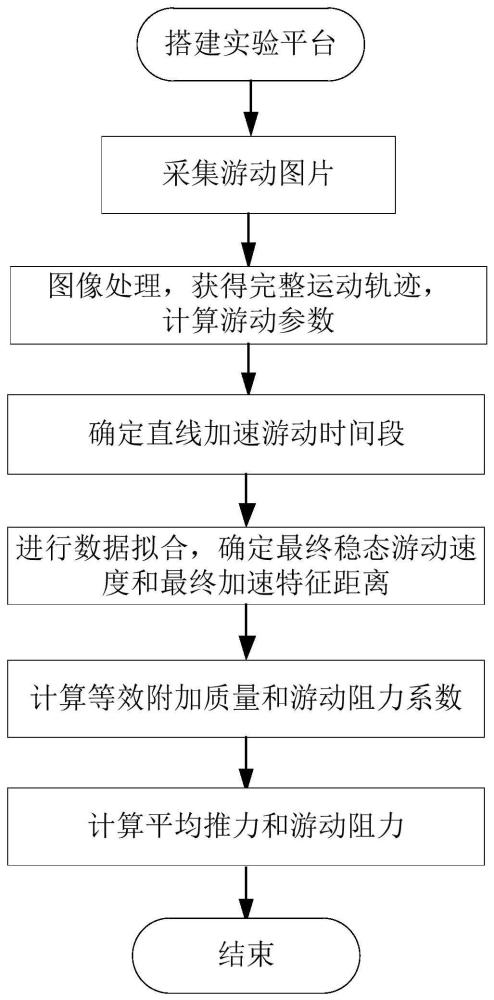
身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法
本发明涉及身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,属于仿生水下机器鱼动力测量。背景技术:1、目前,身体尾鳍模式仿生水下机器鱼游动推力的实验测量方法有两种,一种是基于高精度力传感器的......
技术新讯 > 尾鳍 > 列表
 2024-11-19
2024-11-19精选技术
-
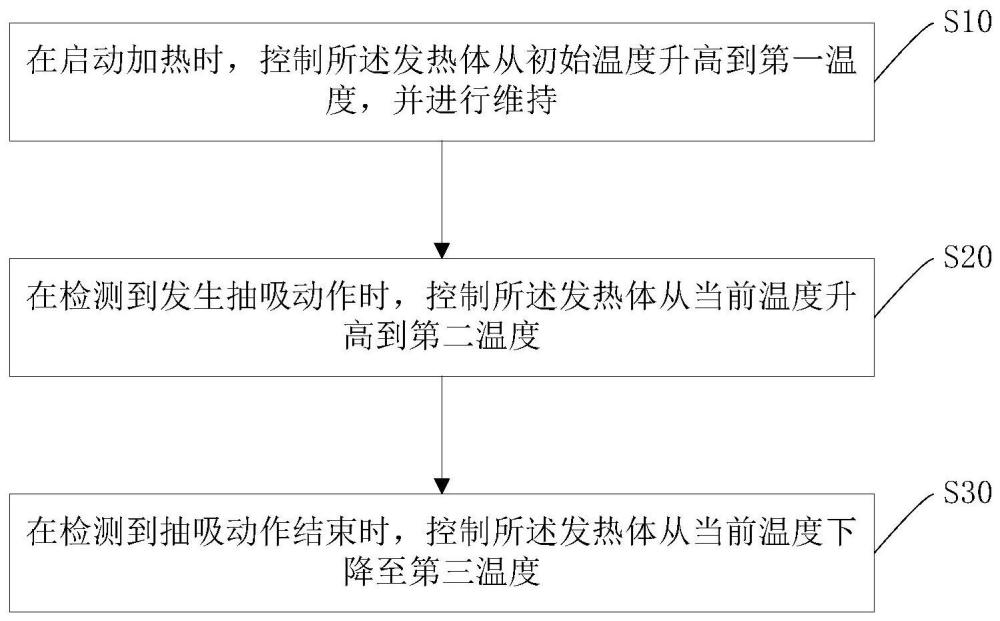
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01