1.本实用新型涉及转向线控底盘技术领域,具体为一种智能四轮转向线控底盘。
背景技术:
2.随着自动化技术和无人车技术的发展,尤其是新冠疫情肆虐的情况下,越来越多的智能车辆被应用到生产生活中。
3.目前,小型智能四轮转向底盘结构比较复杂,成本很高,无法迅速普及占领市场,为此本方案提出了一种低成本智能四轮转向线控底盘,驱动电机采用轮毂电机直接驱动,无减速齿轮,驱动扭矩有限,路况适应性不好。
4.现有电控系统存在缺陷及问题,无转角传感器,不能准确反馈角度信息。控制不精确,不能程序控制自动找零。
技术实现要素:
5.针对现有技术的不足,本实用新型提供了一种智能四轮转向线控底盘,解决了现有的小型智能四轮转向底盘结构比较复杂,成本很高,无法迅速普及占领市场,为此本方案提出了一种低成本智能四轮转向线控底盘,驱动电机采用轮毂电机直接驱动,无减速齿轮,驱动扭矩有限,路况适应性不好。
6.为实现以上目的,本实用新型通过以下技术方案予以实现:包括车架、4组轮边总成及电控单元组成,所述车架由20x20方钢及角钢焊接而成;
7.所述车架由横梁、纵梁、竖梁、电瓶安装支架及控制器安装支架部件构成;
8.所述4组轮边总成均包括一个车轮、减速驱动电机、上下轴承座、双向推力轴承、转角传感器、转向电机、第一过渡支架、第二过渡支架、第三过渡支架以及第四过渡支架;
9.所述双向推力轴承安装在上下轴承座中,所述双向推力轴承上、下圈与上下轴承座刚性连接,所述双向推力轴承中圈与第三过渡支架以及第四过渡支架刚性连接,所述双向推力轴承中圈与上、下圈自由转动;
10.所述转角传感器固定在第一过渡支架上,所述转角传感器中圈与第二过渡支架刚性连接,所述第二过渡支架固定在第三过渡支架上,从而与车轮刚性连接;
11.所述转向电机固定在第一过渡支架上,转向电机输出轴与第三过渡支架刚性连接;
12.所述电瓶安装支架上设有电池,所述电池上设有电池连接器。
13.优选的,所述电控单元由mcu模块、can模块、电源模块、连接器模块、电机驱动模块、传感器及线束组成。
14.优选的,所述mcu模块主芯片选用汽车级单片机,是nxp的32位mcuspc5604。
15.优选的,所述can模块主芯片选用汽车级通信芯片,是nxp的tja1050。
16.优选的,所述电源模块的主芯片选用汽车级dcdc芯片是tps5420。
17.优选的,所述电机驱动模块主芯片选用的是英飞凌btn8962半桥驱动芯片来驱动
轮毂电机和转向电机,所述转角传感器选用的是汽车方向盘下面的转角传感器。
18.有益效果
19.本实用新型提供了一种智能四轮转向线控底盘。具备以下有益效果:设计巧妙,操作简单,可以实现原地转向及横向移动功能。可以实现在狭窄空间内自由移动。改善了现有技术中底盘结构过于复杂,成本过高等缺点;采用大扭矩减速电机,驱动扭矩大,适应各种复杂路况;方便了各种上装及一些其他配件的安装,从而增加了底盘的实用性,转角传感器可以实时测量旋转角度和速度,结合pid算法可以很精准的控制转向的角度和速度。4轮独立控制加速减速转向刹车,运动灵活,原地调头和直接横向纵向行驶。
附图说明
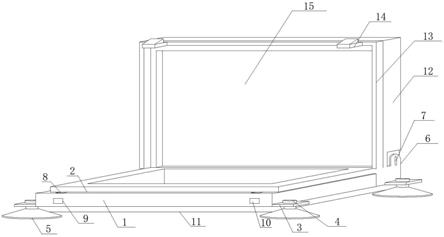
20.图1为本实用新型所述一种智能四轮转向线控底盘的结构示意图。
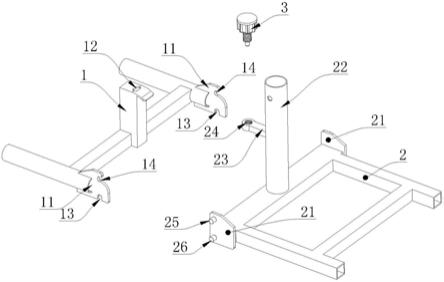
21.图2为本实用新型所述一种智能四轮转向线控底盘的车架结构示意图。
22.图3为本实用新型所述一种智能四轮转向线控底盘的轮边爆炸图。
23.图4为本实用新型所述一种智能四轮转向线控底盘的轮边结构示意图。
24.图5为本实用新型所述一种智能四轮转向线控底盘的mcu模块电路图。
25.图6为本实用新型所述一种智能四轮转向线控底盘的can接口模块电路图。
26.图7为本实用新型所述一种智能四轮转向线控底盘的电源模块电路图。
27.图8为本实用新型所述一种智能四轮转向线控底盘的连接器模块电路图。
28.图9为本实用新型所述一种智能四轮转向线控底盘的电机驱动模块电路图。
29.图10为本实用新型所述一种智能四轮转向线控底盘的主程序流程图。
30.图11为本实用新型所述一种智能四轮转向线控底盘的中断程序。
31.图12为本实用新型所述一种智能四轮转向线控底盘的规划决策算法子程序流程图。
32.图中:1
‑
车架;2
‑
车轮;3
‑
第四过渡支架;4
‑
上下轴承座;5
‑
双向推力轴承;6
‑
转角传感器;7
‑
转向电机;8
‑
第一过渡支架;9
‑
第二过渡支架;10
‑
第三过渡支架;11
‑
减速驱动电机;12
‑
电池;13
‑
电池连接器。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.请参阅图1
‑
12,本实用新型提供一种技术方案:一种智能四轮转向线控底盘,由于4个轮子可单独进行速度和角度的控制,所以有多种运动模式。目前开发出3种实用模式。
35.模式一,底盘前进,前进中转向,后退,后退中转向。
36.模式二,4个轮子与车身成45度角,驱动轮毂电机,底盘以车身中心为圆心画圆,轮毂电机正反装可以实现顺时针和逆时针转圈。此场景适合狭小空间掉头。
37.模式三,4个轮子和车身成90度角,电机正反转可实现向左右横向移动。
38.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实
体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
39.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种智能四轮转向线控底盘,包括车架(1)、4组轮边总成及电控单元组成,其特征在于,所述车架(1)由20x20方钢及角钢焊接而成;所述车架(1)由横梁、纵梁、竖梁、电瓶安装支架及控制器安装支架部件构成;所述4组轮边总成均包括一个车轮(2)、减速驱动电机(11)、上下轴承座(4)、双向推力轴承(5)、转角传感器(6)、转向电机(7)、第一过渡支架(8)、第二过渡支架(9)、第三过渡支架(10)以及第四过渡支架(3);所述双向推力轴承(5)安装在上下轴承座(4)中,所述双向推力轴承(5)上、下圈与上下轴承座(4)刚性连接,所述双向推力轴承(5)与第三过渡支架(10)以及第四过渡支架(3)刚性连接,所述双向推力轴承(5)中圈与上、下圈自由转动;所述转角传感器(6)固定在第一过渡支架(8)上,所述转角传感器(6)中圈与第二过渡支架(9)刚性连接,所述第二过渡支架(9)固定在第三过渡支架(10)上,从而与车轮(2)刚性连接;所述转向电机(7)固定在第一过渡支架(8)上,转向电机(7)输出轴与第三过渡支架(10)刚性连接;所述电瓶安装支架上设有电池(12),所述电池(12)上设有电池连接器(13)。2.根据权利要求1所述的一种智能四轮转向线控底盘,其特征在于,所述电控单元由mcu模块、can模块、电源模块、连接器模块、电机驱动模块、传感器及线束组成。3.根据权利要求2所述的一种智能四轮转向线控底盘,其特征在于,所述mcu模块主芯片选用汽车级单片机,是nxp的32位mcu spc5604。4.根据权利要求2所述的一种智能四轮转向线控底盘,其特征在于,所述can模块主芯片选用汽车级通信芯片,是nxp的tja1050。5.根据权利要求2所述的一种智能四轮转向线控底盘,其特征在于,所述电源模块的主芯片选用汽车级dcdc芯片是tps5420。6.根据权利要求2所述的一种智能四轮转向线控底盘,其特征在于,所述电机驱动模块主芯片选用的是英飞凌btn8962半桥驱动芯片来驱动轮毂电机和转向电机,所述转角传感器(6)选用的是汽车方向盘下面的转角传感器。
技术总结
本实用新型公开了一种智能四轮转向线控底盘,包括车架、组轮边总成及电控单元组成,所述车架由20X20方钢及角钢焊接而成;所述车架由横梁、纵梁、竖梁、电瓶安装支架及控制器安装支架部件构成。本实用新型涉及转向线控底盘技术领域。设计巧妙,操作简单,可以实现原地转向及横向移动功能。可以实现在狭窄空间内自由移动。改善了现有技术中底盘结构过于复杂,成本过高等缺点;采用大扭矩减速电机,驱动扭矩大,适应各种复杂路况;方便了各种上装及一些其他配件的安装,从而增加了底盘的实用性。从而增加了底盘的实用性。从而增加了底盘的实用性。
技术研发人员:李东昉 魏长城 娄喜超 王平 孙仕健 刘鑫
受保护的技术使用者:吉林微思智能科技有限公司
技术研发日:2020.12.02
技术公布日:2021/9/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。