1.本实用新型涉及机械臂技术领域,尤其涉及具有无障碍行驶功能的机械手臂承载平台。
背景技术:
2.随着自动化、智能化发展趋势日渐凸显,人工智能、物联网等前沿技术加速普及应用,机械手臂产品正逐步渗透到经济建设与社会生活的方方面面。机械手臂是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,它可代替人的繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
3.但是在炸弹拆除、排爆、城市管道检修、车底安防等受限空间抢险救援过程中,特别是未知危险的抢险救援过程中,需要进行对现场的勘察、监测等作业。由于抢险现场时间紧、任务重,需要进行大量的清理工作;而现在这些工作基本都由人力完成,存在一定的安全隐患。另外,现有的机械手臂底端的底座均为固定式底座,导致机械手臂只能在固定位置运作,对机械手臂的使用范围造成限制,为此,本技术提出一种具有无障碍行驶功能的机械手臂承载平台,用于承载机械手臂,并将机械手臂推至各种受限空间,使机械手臂能够代替人力完成抢险任务,同时还具有红外避障模块及缓冲组件,能够保证平台无障碍行驶,进而确保硬件安全。
技术实现要素:
4.根据以上技术问题,本实用新型提供具有无障碍行驶功能的机械手臂承载平台,其特征在于包括顶板、轮毂、驱动电机、主轴、防撞装置、缓冲组件,所述顶板底端安装有驱动电机,所述顶板底端安装有轮毂,所述轮毂有4个且分别位于顶板左右两侧的前后两侧,所述轮毂通过主轴与驱动电机的输出端连接,所述顶板侧端安装有防撞装置,所述顶板下侧延伸有支板,所述支板四角安装有缓冲组件;
5.所述缓冲组件包括连接杆、弹簧、接触板、固定板,所述固定板安装在支板上,所述固定板前侧设置有接触板,所述固定板与接触板通过连接杆连接,所述支板上开设有限位孔,所述固定板上开设有通孔,所述接触板上开设有连接孔,所述连接杆依次穿过连接孔、通孔、限位孔设置;所述接触板有3个,3个所述接触板均匀分布在固定板前侧;所述限位孔有3个,3个所述限位孔均匀分布在支板上,所述连接杆有3个;所述通孔有3个,3个所述通孔均匀分布在固定板上。
6.所述连接杆上套装有弹簧,所述弹簧设置在支板与接触板之间;
7.所述顶板上安装有控制器,所述控制器与机械手臂连接,所述控制器与驱动电机连接,所述控制器与防撞装置连接。
8.所述接触板、固定板均为正极磁块。
9.所述防撞装置有8个,8个所述防撞装置平均分布在顶板的前端、后端、左端、右端。
10.所述驱动电机有2个,2个所述驱动电机沿顶板的前后方向设置,后侧的2个所述轮毂与后侧的驱动电机连接,前侧的2个所述轮毂与前侧的驱动电机连接。
11.所述驱动电机通过安装架安装在顶板上,所述安装架包括安装板、支撑座、连接板,所述安装板底端连接有支撑座,所述安装板与顶板铰接,所述支撑座两侧端连接有连接板,所述连接板上开设有过孔,所述过孔的尺寸与主轴的尺寸相适应,所述驱动电机放置在支撑座内,所述主轴穿过过孔设置。
12.所述支撑座为弧形结构。
13.所述防撞装置为红外避障模块。
14.本实用新型的有益效果为:本实用新型利用控制器控制驱动电机工作,并由与驱动电机连接的轮毂带动承载着机械手臂的顶板行走,能够多角度,多方位移动,无需操作者费时费力,且可轻松将机械手臂推至各种受限空间,如炸弹拆除、排爆、管道检修、车底安防等危险场景,可以避免人直接接触危险场景,防止人员伤亡;
15.同时在顶板的前端、后端、左端、右端均安装有为红外避障模块的防撞装置,能够探测路面障碍,并使顶板避开障碍物,保证顶板能够无障碍行驶,避免顶板磕碰,进而确保硬件安全,同时,还在顶板的四角安装有缓冲组件,在顶板四角接触异物时能够将顶板缓冲,从而全方位保证顶板不会磕碰,有效避免机械手臂及硬件碰撞造成损坏;
16.本实用新型的缓冲组件包括弹簧、均为正极磁块的接触板及固定板,弹簧可对接触板一级缓冲,接触板及固定板利用磁块的同极相斥原理,进一步提供缓冲保护,有效保证了硬件安全。
附图说明
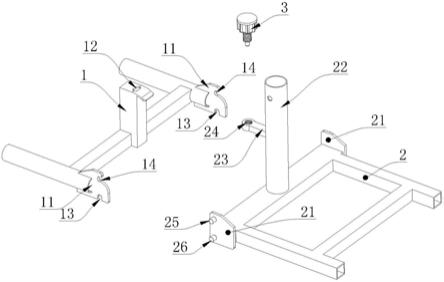
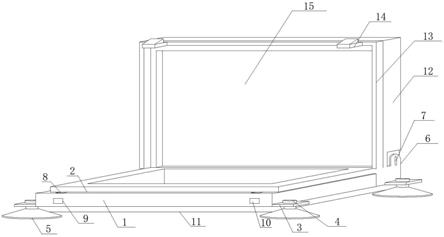
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型的缓冲组件结构示意图;
19.图3为本实用新型的安装架结构示意图。
20.如图:1.顶板、1
‑
1.支板、1
‑1‑
1.限位孔、3.轮毂、3
‑
1.主轴、3
‑
2.驱动电机、4.安装架、4
‑
1.支撑座、4
‑
2.连接板、4
‑2‑
1.过孔、4
‑
3.安装板、5.防撞装置、6.缓冲组件、7.接触板、7
‑
1.连接孔、8.固定板、8
‑
1.通孔、9.连接杆、10.弹簧。
具体实施方式
21.实施例1
22.本实用新型提供具有无障碍行驶功能的机械手臂承载平台,其特征在于包括顶板1、轮毂3、驱动电机3
‑
2、主轴3
‑
1、防撞装置5、缓冲组件6,顶板1底端安装有驱动电机3
‑
2,顶板1底端安装有轮毂3,轮毂3有4个且分别位于顶板1左右两侧的前后两侧,轮毂3通过主轴3
‑
1与驱动电机3
‑
2的输出端连接,顶板1侧端安装有防撞装置5,顶板1下侧延伸有支板1
‑
1,支板1
‑
1四角安装有缓冲组件6;
23.缓冲组件6包括连接杆9、弹簧10、接触板7、固定板8,固定板8安装在支板1
‑
1上,固定板8前侧设置有接触板7,固定板8与接触板7通过连接杆9连接,支板1
‑
1上开设有限位孔1
‑1‑
1,固定板8上开设有通孔8
‑
1,接触板7上开设有连接孔7
‑
1,连接杆9依次穿过连接孔7
‑
1、通孔8
‑
1、限位孔1
‑1‑
1设置;接触板7有3个,3个接触板7均匀分布在固定板8前侧;限位孔
1
‑1‑
1有3个,3个限位孔1
‑1‑
1均匀分布在支板1
‑
1上,连接杆9有3个;通孔8
‑
1有3个,3个通孔8
‑
1均匀分布在固定板8上。
24.连接杆9上套装有弹簧10,弹簧10设置在支板1
‑
1与接触板7之间;顶板1上安装有控制器,控制器与机械手臂连接,控制器与驱动电机3
‑
2连接,控制器与防撞装置5连接。接触板7、固定板8均为正极磁块。防撞装置5有8个,8个防撞装置5平均分布在顶板1的前端、后端、左端、右端。驱动电机3
‑
2有2个,2个驱动电机3
‑
2沿顶板1的前后方向设置,后侧的2个轮毂3与后侧的驱动电机3
‑
2连接,前侧的2个轮毂3与前侧的驱动电机3
‑
2连接。防撞装置5为红外避障模块。
25.驱动电机3
‑
2通过安装架4安装在顶板1上,安装架4包括安装板4
‑
3、支撑座4
‑
1、连接板4
‑
2,安装板4
‑
3底端连接有支撑座4
‑
1,安装板4
‑
3与顶板1铰接,支撑座4
‑
1两侧端连接有连接板4
‑
2,连接板4
‑
2上开设有过孔4
‑2‑
1,过孔4
‑2‑
1的尺寸与主轴3
‑
1的尺寸相适应,驱动电机3
‑
2放置在支撑座4
‑
1内,主轴3
‑
1穿过过孔4
‑2‑
1设置。支撑座4
‑
1为弧形结构。
26.实施例2
27.当使用本实用新型时,将机械手臂安装在顶板1上,并将机械手臂与控制器连接,控制器控制驱动电机3
‑
2运行,进而通过主轴3
‑
1使轮毂3转动,此时顶板1携带机械手臂行走,当防撞装置5探测到路面障碍,并通过计算路面状况,向控制器传输信号,控制器控制驱动电机3
‑
2改变运行速度和运行方向,进而使顶板1避开障碍物,保证顶板1能够无障碍行驶,避障灵活,可以确保硬件安全;当顶板1的侧角与异物接触时,异物挤压接触板7及连接杆9,连接杆9沿着连接孔7
‑
1、通孔8
‑
1、限位孔1
‑1‑
1移动,接触板7通过弹簧10挤压固定板8,弹簧10可对接触板7缓冲,进而将异物回抵,同时,均为正极磁块的接触板7与固定板8由于磁块的同极相斥原理,进一步将接触板7回送,从而进一步提供缓冲,保证顶板1不会被磕碰,进而保证机械手臂及硬件不会磕损。
28.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本实用新型提到的各个部件为现有领域常见技术,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。