1.本实用新型涉及爬壁机器人技术领域,具体为一种铁质面爬壁机器人的吸附调节机构。
背景技术:
2.爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种,永磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。
3.现有爬壁机器人大多采用的是永磁体方式进行吸附,其结构更加的简单,故障率也较低,然而在实际的使用中,由于爬壁机器人工作时,其工作端会有较大的动作,这就会导致原有的吸附力无法牢牢将设备进行固定,若简单的增加永磁体的吸附力,则会导致爬壁机器人行走阻力增大,不利于设备的长时间工作。
技术实现要素:
4.本实用新型的目的在于提供一种铁质面爬壁机器人的吸附调节机构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种铁质面爬壁机器人的吸附调节机构,包括:支撑主横梁、侧面安装隔板、伺服驱动电机、驱动丝杆、永磁块机构、滑动基板、螺纹块、导向杆、滑动套,所述的支撑主横梁截面为工字型的主体梁,所述的侧面安装隔板为两个,两个侧面安装隔板分别固接在支撑主横梁的两端,两个侧面安装隔板之间对称安装形状机构,所述的伺服驱动电机设置有两个,两个伺服驱动电机对称设置在支撑主横梁的两端下方,所述的驱动丝杆通过轴承座安装在侧面安装隔板的内侧,且驱动丝杆与伺服驱动电机的输出轴连接,所述的滑动基板两端对称设置有螺纹块,所述的螺纹块与驱动丝杆通过螺纹连接,所述的导向杆竖直固接在滑动基板的上端面,所述的滑动套固接在支撑主横梁的下侧,且滑动套滑动连接在导向杆上。
6.进一步的,所述的伺服驱动电机输出端设置有行星减速器。
7.进一步的,所述的伺服驱动电机采用同一控制器控制,两个伺服驱动电机同步转动。
8.与现有技术相比,本实用新型的有益效果是:本实用新型的铁质面爬壁机器人的吸附调节机构,对爬壁机器人的永磁体部分进行改进,通过将永磁体设置在滑动基板上,然后通过驱动机构驱动滑动基板升降,即可改变永磁体与吸附面的间距,增加磁通量,从而增加吸附力。该机构在爬壁机器人进行静止时,下降高度,增加吸附力;而在行走时,上升高度,降低吸附力。
9.本实用新型具有结构简单、安全使用、使用效果好等优点。
附图说明
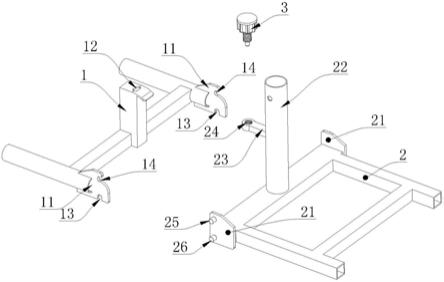
10.图1为本实用新型结构示意图;
11.图中:1
‑
支撑主横梁;2
‑
侧面安装隔板;3
‑
伺服驱动电机;4
‑
驱动丝杆;5
‑
永磁块机构;6
‑
滑动基板;7
‑
螺纹块;8
‑
导向杆;9
‑
滑动套。
具体实施方式
12.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
13.请参阅图1,本实用新型提供了一种铁质面爬壁机器人的吸附调节机构,包括:支撑主横梁1、侧面安装隔板2、伺服驱动电机3、驱动丝杆4、永磁块机构5、滑动基板6、螺纹块7、导向杆8、滑动套9,所述的支撑主横梁1截面为工字型的主体梁,所述的侧面安装隔板2为两个,两个侧面安装隔板2分别固接在支撑主横梁1的两端,两个侧面安装隔板2之间对称安装形状机构,所述的伺服驱动电机3设置有两个,两个伺服驱动电机3对称设置在支撑主横梁1的两端下方,所述的驱动丝杆4通过轴承座安装在侧面安装隔板2的内侧,且驱动丝杆4与伺服驱动电机3的输出轴连接,所述的滑动基板6两端对称设置有螺纹块7,所述的螺纹块7与驱动丝杆4通过螺纹连接,所述的导向杆8竖直固接在滑动基板6的上端面,所述的滑动套9固接在支撑主横梁1的下侧,且滑动套9滑动连接在导向杆8上。
14.进一步的,所述的伺服驱动电机3输出端设置有行星减速器。
15.进一步的,所述的伺服驱动电机3采用同一控制器控制,两个伺服驱动电机3同步转动。
16.工作原理:本实用新型提供了一种铁质面爬壁机器人的吸附调节机构,具体使用时,具体使用时,当爬壁机器人处于行走状态时,滑动基板6处于高位,此时,永磁块机构5与铁质面间距较大,永磁块机构5所产生的吸附力足以让设备不会脱离;当当爬壁机器人处于行走状态,其工作端进行工作时,伺服驱动电机3带动驱动丝杆4转动,通过螺纹块7的传动,从而让滑动基板6下降高度,永磁块机构5与吸附面的间距,增加磁通量,从而增加吸附力,保证工作端在工作时,保证了设备的安全,也不会增加行走时的负荷。
17.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种铁质面爬壁机器人的吸附调节机构,其特征在于,包括:支撑主横梁(1)、侧面安装隔板(2)、伺服驱动电机(3)、驱动丝杆(4)、永磁块机构(5)、滑动基板(6)、螺纹块(7)、导向杆(8)、滑动套(9),所述的支撑主横梁(1)截面为工字型的主体梁,所述的侧面安装隔板(2)为两个,两个侧面安装隔板(2)分别固接在支撑主横梁(1)的两端,两个侧面安装隔板(2)之间对称安装形状机构,所述的伺服驱动电机(3)设置有两个,两个伺服驱动电机(3)对称设置在支撑主横梁(1)的两端下方,所述的驱动丝杆(4)通过轴承座安装在侧面安装隔板(2)的内侧,且驱动丝杆(4)与伺服驱动电机(3)的输出轴连接,所述的滑动基板(6)两端对称设置有螺纹块(7),所述的螺纹块(7)与驱动丝杆(4)通过螺纹连接,所述的导向杆(8)竖直固接在滑动基板(6)的上端面,所述的滑动套(9)固接在支撑主横梁(1)的下侧,且滑动套(9)滑动连接在导向杆(8)上。2.根据权利要求1所述的一种铁质面爬壁机器人的吸附调节机构,其特征在于,所述的伺服驱动电机(3)输出端设置有行星减速器。3.根据权利要求1所述的一种铁质面爬壁机器人的吸附调节机构,其特征在于,所述的伺服驱动电机(3)采用同一控制器控制,两个伺服驱动电机(3)同步转动。
技术总结
本实用新型公开了一种铁质面爬壁机器人的吸附调节机构,包括:支撑主横梁、侧面安装隔板、伺服驱动电机、驱动丝杆、永磁块机构、滑动基板、螺纹块、导向杆、滑动套,所述的支撑主横梁截面为工字型的主体梁,所述的侧面安装隔板分别固接在支撑主横梁的两端,所述的伺服驱动电机对称设置在支撑主横梁的两端下方,所述的驱动丝杆通过轴承座安装在侧面安装隔板的内侧,且驱动丝杆与伺服驱动电机的输出轴连接,所述的滑动基板两端对称设置有螺纹块,所述的螺纹块与驱动丝杆通过螺纹连接,所述的导向杆竖直固接在滑动基板上端面,所述的滑动套固接在支撑主横梁下侧,且滑动套滑动连接在导向杆上。本实用新型具有结构简单、安全使用、使用效果好等优点。果好等优点。果好等优点。
技术研发人员:陆勇峰 张萍 孙卓读
受保护的技术使用者:上海小刀智能科技有限公司
技术研发日:2021.02.01
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。