1.本实用新型涉及航空领域,尤其涉及一种用于机场的自动驾驶巡道车。
背景技术:
2.巡道车,是除飞机外在跑道活动最频繁的车辆,该车主要适用于勘察现场、跑道巡场、雾天巡跑、道面特情巡查等任务。目前,巡道车均为人工驾驶。在驾驶过程中,如何让巡道车驾驶员第一时间了解跑道上航班的运行情况,目前主要是通过传统的对讲机呼叫互传信息,并通过望远镜查看巡道车所在的位置是否与报告信息相符,该方法费时费力,且不够高效直观。
3.为此,如何让巡道车驾驶员高效、直观的在第一时间了解跑道上航班的运行情况,便成为了现有巡道车亟待解决的技术问题。
技术实现要素:
4.本实用新型所要解决的问题是如何提供一种车路云协同作用、统一调度的,能够安全、高效、直观的进行巡道并及时获取和反馈巡道状况的自动驾驶巡道车。
5.为了解决现有技术的上述问题,本实用新型提供了一种用于机场的自动驾驶巡道车,包括车体和车轮,所述车体上设置有控制模块,所述车体的顶部设置有主激光雷达,所述车体的前端和后端设置有毫米波雷达,所述车体的外周设置有高清相机。
6.优选的,所述主激光雷达为64线激光雷达或128线激光雷达。
7.优选的,所述车体的底部设置有平整度测量仪。
8.优选的,所述平整度测量仪设置有两个,且分别位于所述车体底部的前端和尾端。
9.优选的,所述车体上设置有用于记录监测画面的记录仪。
10.优选的,所述车体上设置有与道路上路侧设备交互的车载设备。
11.优选的,所述车体上设置有电量感应器。
12.优选的,所述车体外周设置有补盲激光雷达。
13.优选的,所述补盲激光雷达和所述高清相机均设置为至少两个,且两者间隔分布在所述车体的外周。
14.优选的,所述高清相机包括远距摄像头、近景摄像头和广角摄像头。
15.本实用新型提供的用于机场的自动驾驶巡道车,通过与机场内上位系统之间的交互实现自动驾驶。车体上设置的控制模块,是巡道车与上位系统交互的关键结构。上位系统发送任务指令给控制模块,控制模块根据指令具体内容使巡道车开始执行任务。执行任务的过程中,车体顶部的主激光雷达能够监测巡道车周边的情况,并将其反馈至上位系统,在监测到有异常状况时,也会及时反馈至上位系统,上位系统根据收到的信息及时作出相应的响应。车体前端和后端的毫米波雷达,以及车体外周的高清相机,能够对巡道车外周高度较低的范围进行实时监测,以对主激光雷达监测不到之处进行弥补。
附图说明
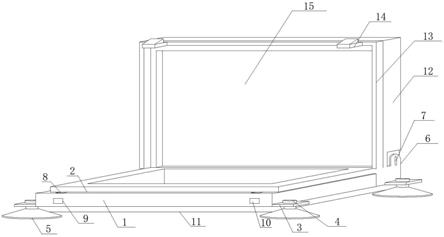
16.图1为本实用新型的提供的用于机场的自动驾驶巡道车的结构示意图;
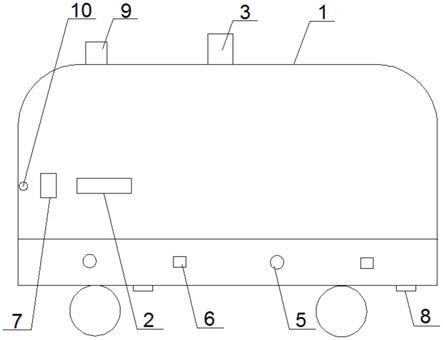
17.图2为本实用新型的提供的用于机场的自动驾驶巡道车另一角度的结构示意图;
18.图3为本实用新型的提供的用于机场的自动驾驶巡道车的控制结构图。
具体实施方式
19.请参考图1至图3,为实用新型实施例提供的一种用于机场的自动驾驶巡道车,该自动驾驶巡道车在车路云协同系统的作用下,由机场的上位系统操控。当该自动驾驶巡道车运用于其它场合时,则与其它场合相应的控制系统交互以实现安全高效的自动巡道。该自动驾驶巡道车包括车体1和车轮,车体1上设置有控制模块2,车体1的顶部设置有主激光雷达3,车体1的前端和后端设置有毫米波雷达4,车体1的外周设置有高清相机5。
20.具体的,控制模块2设置在车体1的前端,其能够接受机场上位系统发送的任务指令,并按照任务指令操控巡道车执行任务。具体为:上位系统发送任务指令及路径规划信息至控制模块2,控制模块2根据任务指令及路径信息控制巡道车沿路径行驶;在行驶的过程中,监测设备(即主激光雷达3、毫米波雷达4和高清相机5)对道路状况进行实时监测,并将监测结果反馈至上位系统;当任务结束时,控制模块2发送结束信息至上位系统,并停车到规定位置等待下次任务指令。监测设备监测到异常状况时,会重点提示上位系统,上位系统根据异常状况信息作出相应的响应。比如路面维修或者路面清理或者障碍物清除或者飞机停位异常等。
21.上述主激光雷达3、毫米波雷达4和高清相机5的设置,能够在巡道车行驶的过程中实时监测车辆周围及道路的状况,联合作业时,能够将信息更准确全面的反馈至上位系统,从而使上位系统做出高效精准的记录与分析,并提供更安全有效的自动驾驶指导。
22.毫米波雷达4具有抗干扰、穿透力强、空间分辨率高等特点,因此能够使自动驾驶巡道车适应更多样的环境。
23.此外,还可以在车体1上设置辅助传感器。该辅助传感器能够在恶劣天气、障碍物以及其它车辆遮挡等极端状况存在时,对车道进行更准确的判断,从而进一步提高行驶的安全性。
24.上述主激光雷达3可以设置为64线激光雷达或128线激光雷达,优选为128线激光雷达,从而能够更精准的呈现车辆周围的影像及道路情况,使自动驾驶巡道车能够更高效的完成巡道任务。
25.本技术的一个优选实施例中,车体1的底部设置有平整度测量仪8,以对路面的平整度进行实时监测,并将监测结果反馈至上位系统。当平整度监测结果不符合要求时,则上位系统及时给对应的系统派发维护指令,从而协同且高效的完成各项任务。
26.平整度测量仪8可以设置为两个,且分别设置在车体1底部的前端和尾端,具体如图1所示。当然了,具体设置位置根据可以根据实际情况进行相应的调整,此处不做具体限定。
27.为了更好的记录巡道情况,还可以在车体1上设置用于记录监测画面的记录仪10。此时,巡道情况一方面可以反馈至上位系统,另一方面还会保存在记录仪10内,从而进行了双重设置,以方便人工随时查询。
28.巡道车在行驶的过程中,为了更精确的对其进行定位,可以在车体1上设置车载设备7,该车载设备7能够与道路侧边的路侧设备进行交互,通过车载设备7与相邻的两个路侧设备之间的交互信息,可以确定巡道车的行驶方向和所在位置,从而判断任务执行情况,并根据所处位置的道路信息(红绿灯颜色和时间信息、岔路口车辆信息等)对巡道车的行驶进行更准确的操控。
29.为了进一步消除巡道车在行驶过程中监测设备的监测盲区,车体1外周设置有补盲激光雷达6。具体的,补盲激光雷达6和高清相机5均设置为至少两个,且两者间隔分布在车体1的外周,具体如图2所示。
30.本技术中的高清相机5可以包括远距摄像头、近景摄像头和广角摄像头,从而对车周的情况进行更精准的成像。
31.本技术中的自动驾驶巡道车优选设置为电动车,且车体1上设置有电量感应器。当电量不足时,控制模块2会发送待充电信息至上位系统,上位系统根据其所在位置就近分配空闲的充电桩进行充电。
32.本技术的一个具体实施例中,上述控制模块2包括网络通讯设备、总线数据记录装置、主计算单元及导航设备,这些设备可以安装在一起,以使安装更紧凑,空间更简洁,如一体安装在车体1的前端,或者后端。当然也可以分别安装在车体1的不同位置,优选的,控制模块2包含的所有设备均安装在一处,以节约空间,并便于集中管理。总线数据记录装置能够全程记录车辆的行驶信息,导航设备能够根据上位系统规划的路线引导车辆按照路线行驶,优选的,导航设备选为四合一组合导航设备,能够进行四合一融合定位。主计算单元和网络通讯设备能够与上位系统交互,实时监测车辆的行驶状态,并接收任务信息。
33.具体的,上位系统包括任务下发平台、任务执行平台和车辆调度管理平台。任务下平台发包括塔台管制模块,机场指挥模块、航司运控模块和转运模块,任务下发平台生成机场用车需求。任务下发平台将机场用车需求传输给车辆调度管理平台,车辆调度管理平台向自动驾驶巡道车下发行车路径,以使自动驾驶巡道车按照行车路径到达目标位置并执行用车任务。
34.任务执行平台监控自动驾驶巡道车对用车任务的执行情况,根据执行情况生成任务反馈信息,并将任务反馈信息发送给车辆调度管理平台。车辆调度管理平台根据任务反馈信息生成新的机场用车需求。
35.通过上述技术方案,本实用新型实现了整个机场范围内所有自动驾驶巡道车的统一调度管理、科学路径规划,为各用车单位提供安全、高效、可控的服务保障。
36.上述塔台管制模块包括a
‑
smgcs系统和气象信息系统,机场指挥模块包括orms系统和fims系统,航司运控模块包括ghs系统和其他航司系统,转运模块包括ghs系统和其他航司系统。
37.高级场面运动引导与控制系统(a
‑
smgcs)应具备多种监视源数据接收和融合功能。采用广播式自动相关监视、多点定位、二次监视雷达等监视技术对协同监控目标实现监视;对非合作监控目标,包括监视目标、障碍和外来物,需采用场面监视雷达、视景增强和跑道异物检测等监视技术。高级场面活动引导与控制模块包括四级功能,分别为:监视、控制、路由和引导。
38.监视功能包括覆盖区域内所有运动及静止航空器和车辆的精确定位;根据引导与
控制需求对沿路径的时间与位置数据进行更新;检测任何入侵包括航空器运动区域、跑道带及指定保护区域的入侵;完成对机场地面、飞行初始阶段和飞行最后阶段的监视。
39.控制功能包括使授权运动速度最大化(动态能力);检测冲突及提供解决方案;提供纵向间距;对跑道或滑行道入侵提供告警并启动保护装置(如停止牌或报警器);对紧急入侵提供告警等。
40.路由功能实现复杂机场车辆密集情况下,为运动区域中每一航空器或车辆指派行驶路线、改变目的地及线路的功能。
41.引导功能主要包括为飞行员和驾驶员提供清晰的指示以允许他们沿指派路径行进;显示受限或不可用的路径及区域;接受路由的随时改变;对所有的引导辅助设备的运行状态进行监控等。
42.本实用新型实施例提供的自动驾驶巡道车,通过与机场内上位系统之间的交互实现自动驾驶。车体上设置的控制模块2,是巡道车与上位系统交互的关键结构。上位系统发送任务指令给控制模块2,控制模块2根据指令具体内容使巡道车开始执行任务。执行任务的过程中,车体1顶部的主激光雷达3能够监测巡道车周边的情况,并将其反馈至上位系统,在监测到有异常状况时,也会及时反馈至上位系统,上位系统根据收到的信息及时作出相应的响应。车体1前端和后端的毫米波雷达4,以及车体外周的高清相机5,能够对巡道车外周高度较低的范围进行实时监测,以对主激光雷达3监测不到之处进行弥补。
43.本技术为巡道车配置了自动驾驶系统,由机场车辆管理系统统一管控地面交通情况,实现了机场空管部门对巡道车所在位置的随时、准确、及时的掌握,以及对巡道车行驶轨迹、实时监控等安全运行情况的掌控,同时自动驾驶巡道车通过与上位系统的交互也能掌握机场跑道的航班运行情况。
44.如图3所示,本技术的自动驾驶巡道车在车路云协同系统的作用下,由机场的上位系统操控。其中,车为自动驾驶巡道车、路为机场道路及其上的路侧设备、云为机场的上位系统,在三者的相互交互下,实现了自动驾驶巡道车的统一调度,合理规划布局了机场内部地面交通,提升了巡道作业的安全性及工作效率,实现了高效、有序、安全的巡道任务,且自动驾驶实现了大量的人力、物力成本的节约。
45.通过自动驾驶巡道车、路侧设备及上位系统之间的有效协同、数据共享,实现了机场环境内的整体实时监控,增加了可控性。
46.对于本领域普通技术人员来说,根据本实用新型的上述实施方式所作出的任何修改、变动,在不脱离本实用新型宗旨的情况下,均应包含于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。