1.本实用新型涉及机器人技术领域,尤其是涉及仿尺蠖运动形态的复合式爬壁机器人。
背景技术:
2.爬壁机器人作为替代人们在陡峭壁面作业、实时获取三维空间层面环境信息的重要装备,能够有效地提高作业效率并保障作业安全,可广泛应用于化工设备、核燃料罐的检测、玻璃幕墙的清洗以及侦查等领域。传统爬壁机器人采用的真空、强磁、静电等壁面附着方式仅适用于特定的应用场景,此后,人们通过模仿壁虎、蜘蛛、蝾螈、昆虫等生物特殊的附着与运动能力,开发出了一系列的仿生爬壁机器人。然而,现有仿生爬壁机器人大多数只能在单一类型壁面上攀爬,且不能实现多种附着方式的协同作用,未能很好地解决在不同壁面爬行时的稳定性和适应性问题。很大程度限制了爬壁技术的发展。
技术实现要素:
3.本实用新型要解决的技术问题是:为了克服现有技术中仿生爬壁机器人大多数只能在单一类型壁面上攀爬,且不能实现多种附着方式的协同作用,未能很好地解决在不同壁面爬行时的稳定性和适应性问题的问题,提供一种仿尺蠖运动形态的复合式爬壁机器人,该实用新型提出了两种运动模式:即地面轮式快速移动模式以及攀爬模式,通过切换两种运动模式,机器人不仅可以实现在水平地面的快速移动还可实现在复杂壁面的攀爬。
4.本实用新型解决其技术问题所采用的技术方案是:一种仿尺蠖运动形态的复合式爬壁机器人,包括第一机械臂和第二机械臂,第一机械臂通过第一驱动单元和其上的手抓机构传动连接,第二机械臂通过第二驱动单元和其上的手抓机构传动连接,所述第一机械臂通过中间驱动单元与第二机械臂传动连接;
5.所述第一驱动单元用于驱动其上的手抓机构绕第一轴线相对第一机械臂发生转动,所述中间驱动单元用于驱动第一机械臂绕第二轴线相对第二机械臂发生转动,所述第二驱动单元用于驱动其上的手抓机构绕第三轴线相对第二机械臂发生转动,其中,第一轴线、第二轴线及第三轴线彼此平行;
6.所述手抓机构包括关节支架、吸盘、两个手抓组件及手抓驱动单元,所述吸盘固定安装在关节支架的底部,所述手抓组件均位于关节支架的底部,所述手抓驱动单元用于驱动两个手抓组件相互靠拢或远离;
7.两个手抓机构的关节支架上均至少设有两个滚轮,所有滚轮中至少存在一个滚轮为主动轮,其余滚轮为从动轮,所述主动轮上传动连接有用于驱动其转动的滚轮驱动单元。
8.手抓组件包括爪刺座和沿直线方向间隔设置在爪刺座上的若干弹性刺片,所述弹性刺片的底部向下凸出有钩爪。
9.手抓驱动单元包括手抓电机、齿轮、第一齿条和第二齿条,所述第一齿条和第二齿条均滑动安装在关节支架上,手抓电机固定安装在关节支架上,所述手抓电机的输出端和
齿轮传动连接,第一齿条和第二齿条分别位于齿轮的两侧,且均与齿轮啮合。
10.第一齿条和第二齿条均通过滑块滑动连接于关节支架上设置的滑轨上。
11.主动轮设置于其中一个手抓机构上的关节支架上,且有两个主动轮,另外一个手抓机构上的关节支架上设置两个从动轮,所述主动轮上连接的滚轮驱动单元为驱动电机。
12.第一驱动单元包括第一固定座,所述第一固定座一端固定连接第一机械臂,且第一固定座另一端通过第一驱动电机传动连接手抓机构。
13.第二驱动单元包括第二固定座,所述第二固定座一端固定连接第二机械臂,且第二固定座另一端通过第二驱动电机传动连接手抓机构。
14.中间驱动单元包括中间固定座,所述中间固定座一端固定连接第二机械臂,且中间固定座另一端通过中间驱动电机传动连接第一机械臂。
15.吸盘包括吸附裙边,所述吸附裙边中部设有吸盘内腔,且吸附裙边内部开设有裙边内腔,所述吸附裙边后端部设有用于连接关节支架的吸盘连接支座,所述吸附裙边外表面设有若干个吸附气嘴,所述吸附气嘴末端连接有真空发生器。
16.裙边内腔内填充有咖啡粉末。
17.通过调节弹性刺爪爪刺弹性体的空间布局,可以保证弹性刺爪有足够的刚度和柔性,以有利于弹性刺爪能够支撑,便于弹性刺爪沿壁面滑动以寻找合适的抓附点。手抓组件的工作原理为:手抓电机的舵盘与齿轮紧固连接,齿轮与第一齿条和第二齿条处于啮合状态,第一齿条和第二齿条均通过滑块滑动连接在关节支架上设置的滑轨上,弹性刺片固定在爪刺座中,爪刺座采用3d打印方式制造而成。随着手抓电机驱动第一齿条和第二齿条的转动,经齿轮和第一齿条和第二齿条的啮合运动,进而实现了两侧弹性刺片的对抓与松开动作;此外,在吸盘上的吸附气嘴处连接真空发生器,并在裙边内腔内部填充咖啡粉末,吸附裙边根据壁面的特征自适应地嵌入壁面颗粒之间的空隙,不仅阻断了与外界空气的连通,同时还能起到抓附作用。机器人在光滑壁面爬行时,弹性刺片与壁面特征之间没有附着位置,因此,只有通过吸盘才能实现机器人在壁面的附着,吸附裙边与壁面接触后,阻断了空气的流通,通过真空发生器不断地抽气,吸盘内腔形成了负压,进而实现了机器人在壁面的吸附。在裙边内腔内部填充咖啡粉末,在真空吸附力的的作用下,吸附裙边基体刚度发生变化,吸附裙边边缘不仅可以实现与壁面的有效密封,同时,还可以作为抓持工具用于实现对直径细小物体的抓取。
18.机器人共有两种运动模式,即地面轮式快速移动模式以及攀爬模式。通过转动第一机械臂、第二机械臂及两个手抓机构的角度切换两种运动模式,机器人不仅可以实现在水平地面的快速移动还可实现在复杂壁面的攀爬。
19.地面轮式快速移动模式包括其中一个手抓机构上的两个滚轮驱动单元和两个主动轮以及另一个手抓机构上的两个从动轮组成,通过控制前端手抓机构上的两个滚轮驱动单元的速度可实现机器人的前进、后退、转弯等动作。
20.爬壁模式是由三自由度的第一机械臂和第二机械臂以及两个手抓机构组成,三自由度的第一机械臂和第二机械臂用于调整前后两个手抓机构的位置,由中间驱动电机、第一驱动电机和第二驱动电机进行驱动;两个手抓机构均包括两个仿生柔性对抓的吸盘,以及两个手抓组件,其中:吸盘的基体是由硅胶材料和尼龙通过形状沉积工艺融合而成,末端的弹性刺片采用鱼钩粘接而成;通过齿轮与两侧第一齿条和第二齿条的啮合,进而实现两
侧弹性刺片的抓附与脱开;吸盘包括真空发生器、吸盘内腔、裙边内腔和吸附裙边,吸附裙边内部的裙边内腔中填充满了3/4的咖啡沫,通过真空发生器的抽气可实现吸附裙边与壁面的紧密密封。当吸盘与粗糙壁面接触时,依靠两侧的手抓组件与壁面颗粒的抓附即可实现机器人在壁面的附着,同时,柔性的吸附裙边还可与壁面颗粒有效嵌合在一起,吸盘可起到辅助支撑作用。当吸盘与光滑壁面接触时,对抓足与壁面之间无抓附点,因此,只能依靠柔性吸盘与壁面间形成的密闭空间进而实现机器人在壁面的附着。两个手抓组件上的弹性刺片与壁面抓附时,必须保证两个手抓组件连线垂直壁面,确保弹性刺片有效钩住壁面颗粒特征。
21.本实用新型的有益效果是:本实用新型相比现有技术具有以下优点:
22.1.本实用新型提供的仿尺蠖运动形态的复合式爬壁机器人,创新地结合了真空吸附、爪刺抓附以及地面快速行走运动模式,可以实现多种复杂壁面的攀爬作业以及地面的快速运动。
23.2.机器人可实现在多种特征壁面爬行,在粗糙壁面爬行时,采用的运动模式为真空吸附与爪刺抓附结合,在光滑壁面爬行时,仅仅依靠真空吸附产生的吸附力实现机器人在壁面的稳定爬行。
24.3.尺蠖运动步态为爬壁机器人的运动模式设计提供了灵感,这种交替运动方式可使机器人有较大的越障能力。
25.4.手抓的对抓动作采用的是一个舵机带动中间齿轮与两侧的齿条相互啮合来实现,该运动方式有利于爪刺与壁面接触后实现直线往复运动,避免爪刺基体与壁面接触时发生较大的形变而破坏。
附图说明
26.下面结合附图和实施例对本实用新型进一步说明。
27.图1是本实用新型的结构示意图;
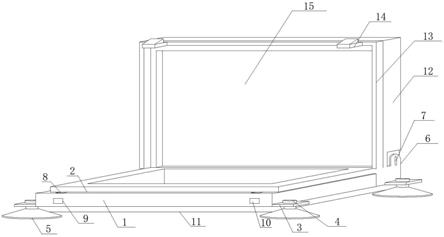
28.图2是图1的主视图;
29.图3是机器人攀爬模式的结构示意图;
30.图4是机器人地面轮式快速移动模式的结构示意图;
31.图5是图1中手抓机构的结构示意图;
32.图6是图5的主视图;
33.图7是图6中a
‑
a处的剖视图;
34.图8是图5中手抓组件的连接结构示意图;
35.图9是图8的侧视图;
36.图10是图1中吸盘的内部结构示意图。
37.图中:1.第一机械臂;
38.2.第二机械臂;
39.3.第一驱动单元,31.第一固定座,32.第一驱动电机;
40.4.手抓机构,41.关节支架,42.吸盘,421.吸附裙边,422.吸盘内腔,423.裙边内腔,424.吸盘连接支座,425.吸附气嘴,426.真空发生器,43.手抓组件,431. 爪刺座,432.弹性刺片,433.钩爪,44.手抓驱动单元,441.手抓电机,442.齿轮, 443.第一齿条,444.第
二齿条,445.滑块,446.滑轨,45.滚轮,46.滚轮驱动单元,
41.5.第二驱动单元,51.第二固定座,52.第二驱动电机;
42.6.中间驱动单元,61.中间固定座,62.中间驱动电机。
具体实施方式
43.现在结合附图对本实用新型做进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
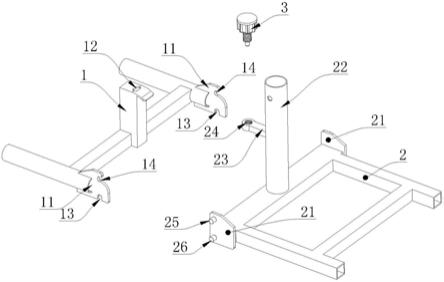
44.如图1是本实用新型的结构示意图,一种仿尺蠖运动形态的复合式爬壁机器人,包括第一机械臂1和第二机械臂2,第一机械臂1通过第一驱动单元3和其上的手抓机构4传动连接,第二机械臂2通过第二驱动单元5和其上的手抓机构4传动连接,所述第一机械臂1通过中间驱动单元6与第二机械臂2传动连接;
45.结合图1至图4所示,所述第一驱动单元3用于驱动其上的手抓机构4绕第一轴线相对第一机械臂1发生转动,所述中间驱动单元6用于驱动第一机械臂1绕第二轴线相对第二机械臂2发生转动,所述第二驱动单元5用于驱动其上的手抓机构4绕第三轴线相对第二机械臂2发生转动,其中,第一轴线、第二轴线及第三轴线彼此平行;
46.结合图5至图7所示,所述手抓机构4包括关节支架41、吸盘42、两个手抓组件43及手抓驱动单元44,所述吸盘42固定安装在关节支架41的底部,所述手抓组件43均位于关节支架41的底部,所述手抓驱动单元44用于驱动两个手抓组件43相互靠拢或远离;
47.结合图1至图7所示,两个手抓机构4的关节支架41上均至少设有两个滚轮45,所有滚轮45中至少存在一个滚轮45为主动轮,其余滚轮45为从动轮,所述主动轮上传动连接有用于驱动其转动的滚轮驱动单元46。
48.结合图8和图9所示,手抓组件43包括爪刺座431和沿直线方向间隔设置在爪刺座431上的若干弹性刺片432,所述弹性刺片432的底部向下凸出有钩爪 433。
49.结合图5至图7所示,手抓驱动单元44包括手抓电机441、齿轮442、第一齿条443和第二齿条444,所述第一齿条443和第二齿条444均滑动安装在关节支架41上,手抓电机441固定安装在关节支架41上,所述手抓电机441的输出端和齿轮442传动连接,第一齿条443和第二齿条444分别位于齿轮442 的两侧,且均与齿轮442啮合。
50.结合图5至图7所示,第一齿条443和第二齿条444均通过滑块445滑动连接于关节支架41上设置的滑轨446上。
51.结合图1至图7所示,主动轮设置于其中一个手抓机构4上的关节支架41 上,且有两个主动轮,另外一个手抓机构4上的关节支架41上设置两个从动轮,所述主动轮上连接的滚轮驱动单元46为驱动电机。
52.结合图1至图4所示,第一驱动单元3包括第一固定座31,所述第一固定座31一端固定连接第一机械臂1,且第一固定座31另一端通过第一驱动电机 32传动连接手抓机构4。
53.结合图1至图4所示,第二驱动单元5包括第二固定座51,所述第二固定座51一端固定连接第二机械臂2,且第二固定座51另一端通过第二驱动电机 52传动连接手抓机构4。
54.结合图1至图4所示,中间驱动单元6包括中间固定座61,所述中间固定座61一端固定连接第二机械臂2,且中间固定座61另一端通过中间驱动电机 62传动连接第一机械臂1。
55.结合图1和图10所示,吸盘42包括吸附裙边421,所述吸附裙边421中部设有吸盘内
腔422,且吸附裙边421内部开设有裙边内腔423,所述裙边内腔423 中设置有咖啡粉末,所述吸附裙边421后端部设有用于连接关节支架的吸盘连接支座424,所述吸附裙边421外表面设有若干个吸附气嘴425,所述吸附气嘴 425末端连接有真空发生器426。
56.通过调节弹性刺爪432爪刺弹性体的空间布局,可以保证弹性刺爪432有足够的刚度和柔性,以有利于弹性刺爪432能够支撑,便于弹性刺爪432沿壁面滑动以寻找合适的抓附点。手抓组件43的工作原理为:手抓电机441的舵盘与齿轮442紧固连接,齿轮442与第一齿条443和第二齿条444处于啮合状态,第一齿条443和第二齿条444均通过滑块445滑动连接在关节支架41上设置的滑轨446上,弹性刺片432固定在爪刺座431中,爪刺座431采用3d打印方式制造而成。随着手抓电机441驱动第一齿条443和第二齿条444的转动,经齿轮442和第一齿条443和第二齿条444的啮合运动,进而实现了两侧弹性刺片432的对抓与松开动作;此外,在吸盘42上的吸附气嘴425处连接真空发生器 426,并在裙边内腔423内部填充咖啡粉末,吸附裙边421根据壁面的特征自适应地嵌入壁面颗粒之间的空隙,不仅阻断了与外界空气的连通,同时还能起到抓附作用。机器人在光滑壁面爬行时,弹性刺片432与壁面特征之间没有附着位置,因此,只有通过吸盘42才能实现机器人在壁面的附着,吸附裙边421与壁面接触后,阻断了空气的流通,通过真空发生器426不断地抽气,吸盘内腔 422形成了负压,进而实现了机器人在壁面的吸附。在裙边内腔423内部填充咖啡粉末,在真空吸附力的的作用下,吸附裙边421基体刚度发生变化,吸附裙边421边缘不仅可以实现与壁面的有效密封,同时,还可以作为抓持工具用于实现对直径细小物体的抓取。
57.机器人共有两种运动模式,即地面轮式快速移动模式以及攀爬模式。通过转动第一机械臂1、第二机械臂2及两个手抓机构4的角度切换两种运动模式,机器人不仅可以实现在水平地面的快速移动还可实现在复杂壁面的攀爬。
58.地面轮式快速移动模式包括其中一个手抓机构4上的两个滚轮驱动单元46 和两个主动轮以及另一个手抓机构4上的两个从动轮组成,通过控制前端手抓机构4上的两个滚轮驱动单元46的速度可实现机器人的前进、后退、转弯等动作。
59.爬壁模式是由三自由度的第一机械臂1和第二机械臂2以及两个手抓机构4 组成,三自由度的第一机械臂1和第二机械臂2用于调整前后两个手抓机构4 的位置,由中间驱动电机62、第一驱动电机32和第二驱动电机52进行驱动;两个手抓机构4均包括两个仿生柔性对抓的吸盘42,以及两个手抓组件43,其中:吸盘42的基体是由硅胶材料和尼龙通过形状沉积工艺融合而成,末端的弹性刺片432采用鱼钩粘接而成;通过齿轮442与两侧第一齿条443和第二齿条444的啮合,进而实现两侧弹性刺片432的抓附与脱开;吸盘42包括真空发生器426、吸盘内腔422、裙边内腔423和吸附裙边421,吸附裙边421内部的裙边内腔423中填充满了3/4的咖啡沫,通过真空发生器426的抽气可实现吸附裙边421与壁面的紧密密封。当吸盘42与粗糙壁面接触时,依靠两侧的手抓组件43与壁面颗粒的抓附即可实现机器人在壁面的附着,同时,柔性的吸附裙边 421还可与壁面颗粒有效嵌合在一起,吸盘42可起到辅助支撑作用。当吸盘42 与光滑壁面接触时,对抓足与壁面之间无抓附点,因此,只能依靠柔性吸盘与壁面间形成的密闭空间进而实现机器人在壁面的附着。两个手抓组件43上的弹性刺片432与壁面抓附时,必须保证两个手抓组件43连线垂直壁面,确保弹性刺片432有效钩住壁面颗粒特征。
60.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人
员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。