本实用新型涉及海洋工程技术领域,尤其涉及一种基于波浪能滑翔器的水下实时观测系统。
背景技术:
水下实时观测系统是海洋预警、预报的重要设备之一,通常采用将潜标主体定位在水下一定深度,通过其搭载的传感器完成对海洋各类环境等进行观测,并将采集信息通过水密缆传递至漂浮在海面的浮标,发送数据至卫星;但常规方法存在海面浮标易受海面风浪影响,长期工作在恶劣海况后可靠性差,且观测区域面积小,不具备区域巡航等功能。
波浪能滑翔器是一种开阔海域海洋环境监测系统,具备续航持久,可实时传输优点,但受限于自身结构和工作特点,搭载能力有限,且无法观测深水区域海洋数据,与波浪滑翔器相比,潜标主体隐匿在水下一定深度,搭载能力强,可以对海洋动力环境等要素进行立体观测,但目前主要应用的自容潜标难以实现观测数据的实时传输,在海洋预警、预报等应用上具有较大缺陷。
技术实现要素:
本实用新型针对现有的波浪能滑翔器存在的上述不足,提供了一种基于波浪能滑翔器的水下实时观测系统,该基于波浪能滑翔器的水下实时观测系统解决了现有的波浪能滑翔器受限于自身结构和工作特点,搭载能力有限,且无法观测深水区域海洋数据,以及目前主要应用的自容潜标难以实现观测数据的实时传输,在海洋预警、预报等应用上具有较大缺陷的技术难题。
为了达到上述目的,本实用新型提供了如下技术方案:
一种基于波浪能滑翔器的水下实时观测系统,包括:
波浪能滑翔器和主浮体,所述波浪能滑翔器上设置有用于接收主浮体数据的第一水声通信机;
所述主浮体包括主浮体框架,所述主浮体框架上安装有用于将采集信息由主浮体传送至波浪能滑翔器的第二水声通信机,所述主浮体的艏部和艉部安装有止荡环;
锚泊系留装置,所述锚泊系留装置设有凯夫拉缆,所述凯夫拉缆上部与所述主浮体框架固定连接,所述凯夫拉缆下部安装有声学释放器,所述声学释放器下方设置有重力锚。
进一步地,所述的波浪能滑翔器还包括:
滑翔器水面母船及水下牵引机,所述滑翔器水面母船上方安装有卫星通信装置,所述滑翔器水面母船下方通过柔性吊缆连接有水下牵引机。
进一步地,所述第一水声通信机安装于所述水下牵引机底部。
进一步地,所述主浮体的主浮体框架上还固定有用于观测主浮体向上区域流场的声学多普勒海流剖面仪,及用于观测主浮体所处位置温盐深参数的温盐深仪。
进一步地,所述主浮体还安装有浮力材料和用于平稳水中姿态的翼板。
进一步地,所述主浮体还安装有三组电池舱和一组控制舱。
进一步地,所述三组电池舱和一组控制舱按主浮体重心对称分布。
进一步地,所述凯夫拉缆上部呈y型与所述主浮体框架固定,所述凯夫拉缆下部双并联安装有两组声学释放器。
进一步地,所述波浪能滑翔器可搭载选用气象测量传感器、姿态传感器和位置传感器,所述气象测量传感器包括气温、气压、风速和风向传感器。
进一步地,所述凯夫拉缆可安装包括具有感应耦合功能的温度仪、温深仪和温盐深仪。
与现有技术相比,本实用新型具有以下有益效果:
1、本实用新型提供的基于波浪能滑翔器的水下实时观测系统结合波浪滑翔器与潜标两者的技术优势,通过利用波浪能滑翔器的虚拟锚泊能力,特定坐海面标位置固定,通过水声通信机完成数据传输,实现潜标以无线水声方式传至滑翔器,避免了恶劣海况等因素造成潜标系统损坏,同时弥补了潜标表层海面观测能力。
2、本实用新型提供的基于波浪能滑翔器的水下实时观测系统具备实时传输功能,采用波浪能滑翔器作为潜标数据传输中继节点,利用波浪能滑翔器具备的虚拟锚泊定位功能,以水声通信方式接收数据,并通过滑翔器天线传输至卫星通信系统,可实现单次300字节以上水下数据实时传输。
3、本实用新型提供的基于波浪能滑翔器的水下实时观测系统可靠性高,同时将波浪滑翔器与潜标链结合在一套观测系统中,工作状态下两者之间无物理连接,保持相对独立,即使在恶劣海况下也不会对水下潜标部分造成破坏。
4、本实用新型提供的基于波浪能滑翔器的水下实时观测系统观测范围大,在一套观测系统中,通过潜标与波浪滑翔器分别实现海洋垂向剖面与表层区域海气界面观测,满足了对应指标的观测需求。
5、本实用新型提供的基于波浪能滑翔器的水下实时观测系统工作时间长,该波浪能滑翔器能源来自太阳能电池板和海洋波浪能,因而具有较长的续航能力,水下潜标部分采用多组电池舱设计,延长了水下观测设备的工作时间,从而保证整个系统拥有较长的工作时间。
6、本实用新型提供的基于波浪能滑翔器的水下实时观测系统中主浮体姿态稳定,主浮体姿态稳定,主浮体流体线型配合艉部稳定翼设计,可最大程度降低海流对主浮体姿态的影响。
7、本实用新型提供的基于波浪能滑翔器的水下实时观测系统布放简单,波浪滑翔器与潜标无线线缆连接,同时同地点布放难度小,安全性高。
附图说明
图1为本实用新型实施例提供的基于波浪能滑翔器的水下实时观测系统在工作状态时的结构示意图;
图2为本实用新型实施例中波浪滑翔器搭载方式示意图;
图3为本实用新型实施例中主浮体的侧视图;
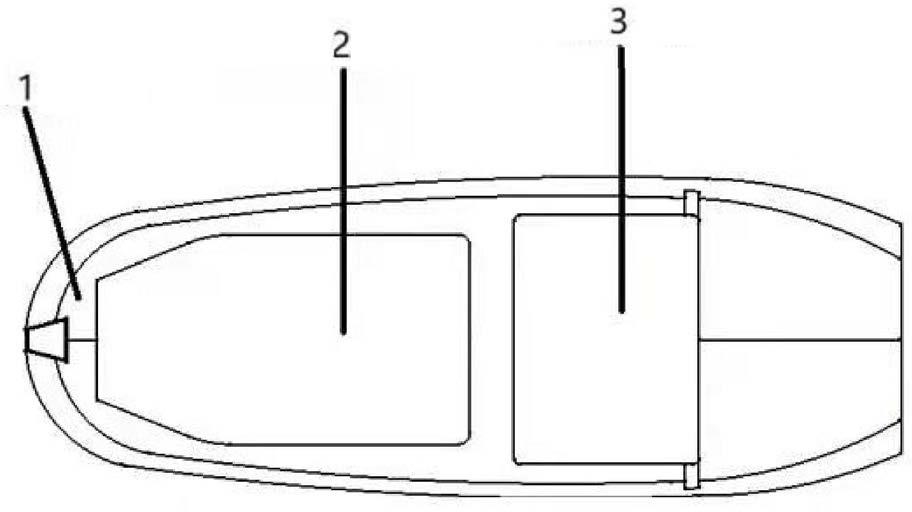
图4为本实用新型实施例中主浮体的俯视图;
图5为本实用新型实施例中锚泊系留装置的结构示意图;
1-波浪能滑翔器、2-主浮体、3-锚泊系留装置、11-滑翔器水面母船、12-水下牵引机、121-第一水声通信机、13-卫星通信装置、21-主浮体框架、22-第二水声通信机、23-止荡环、24-声学多普勒海流剖面仪、25-信标机、26-ctd温盐深仪、27-翼板、281-电池舱、282-控制舱、29-浮力材料、31-凯夫拉缆、32-声学释放器、33-重力锚。
具体实施方式
下面,通过示例性的实施方式对本实用新型进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“底”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
为了更清楚详细地介绍本实用新型实施例所提供的基于波浪能滑翔器的水下实时观测系统,下面将结合具体实施例进行描述。
实施例1
如图1-5所示,本实施例提供的基于波浪能滑翔器的水下实时观测系统,包括:
波浪能滑翔器1和主浮体2,所述波浪能滑翔器1上设置有用于接收主浮体2数据的第一水声通信机121;
所述主浮体2包括主浮体框架21,所述主浮体框架21上安装有用于将采集信息由主浮体2传送至波浪能滑翔器1的第二水声通信机22,所述主浮体2的艏部和艉部安装有止荡环23;
锚泊系留装置3,所述锚泊系留装置3设有凯夫拉缆31,所述凯夫拉缆31上部与所述主浮体框架21固定连接,所述凯夫拉缆31下部安装有声学释放器32,所述声学释放器32下方设置有重力锚33,所述重力锚33位于潜标的最底端为潜标提供系留重力。
本实施例提供的基于波浪能滑翔器的水下实时观测系统结合波浪滑翔器与潜标两者的技术优势,通过利用波浪能滑翔器的虚拟锚泊能力,特定坐海面标位置固定,通过水声通信机完成数据传输,实现潜标以无线水声方式传至滑翔器,避免了恶劣海况等因素造成潜标系统损坏,同时弥补了潜标表层海面观测能力。
所述的波浪能滑翔器1还包括:
滑翔器水面母船11及水下牵引机12,所述滑翔器水面母船11上方安装有卫星通信装置13,内置有气象站,所述卫星通信装置13可以采用铱星模块、北斗模块通讯。所述滑翔器水面母船11下方通过柔性吊缆连接有水下牵引机12。所述第一水声通信机121安装于所述水下牵引机12底部。
本实施例提供的基于波浪能滑翔器的水下实时观测系统利用波浪能滑翔器具备的虚拟锚泊定位功能,由水下牵引机12通过柔性吊缆牵引滑翔器水面母船11航行前进,以第一水声通信机121接收主浮体2的数据,并通过滑翔器水面母船11的卫星通信装置13上传,实现水下数据实时传输。
本实施例提供的基于波浪能滑翔器的水下实时观测系统具备实时传输功能,采用波浪能滑翔器作为潜标数据传输中继节点,利用波浪能滑翔器具备的虚拟锚泊定位功能,以水声通信方式接收数据,并通过滑翔器天线传输至卫星通信系统,可实现单次300字节以上水下数据实时传输;可靠性高,同时将波浪滑翔器与潜标链结合在一套观测系统中,工作状态下两者之间无物理连接,保持相对独立,即使在恶劣海况下也不会对水下潜标部分造成破坏。
本实施例中所述主浮体2的主浮体框架21上还固定有用于观测主浮体2向上区域(200米)流场的声学多普勒海流剖面仪24,及用于观测主浮体2所处位置温盐深参数的温盐深仪26。
所述主浮体2还安装有浮力材料29和用于平稳水中姿态的翼板27,本实施的浮力材料29采用外部流体线型为myring曲线,曲线方程为:y=400*(1-(x/400)^2)^0.5。
本实施例中所述主浮体2还安装有三组电池舱281和一组控制舱282。
所述三组电池舱281和一组控制舱282按主浮体2重心对称分布。
本实施例中所述的主浮体2,水下约200m处,通过主浮体结构框架21固定有声学多普勒海流剖面仪24(adcp),用于观测主浮体向上200米流场,温盐深仪26(ctd)用于观测主浮体所处位置温盐深参数,第二水声通信机22,用于将采集信息传送至波浪滑翔器1,主浮体艏、艉部安装有止荡环23,起到布放稳定作用,同时安装有浮力材料29,翼板27起到平稳水中姿态作用。主浮体2安装有3组电池舱281,1组控制舱282,按主浮体重心对称分布。该基于波浪能滑翔器的水下实时观测系统工作时间长,该波浪能滑翔器能源来自太阳能电池板和海洋波浪能,因而具有较长的续航能力,水下潜标部分采用多组电池舱设计,延长了水下观测设备的工作时间,从而保证整个系统拥有较长的工作时间;主浮体姿态稳定,主浮体姿态稳定,主浮体流体线型配合艉部稳定翼设计,可最大程度降低海流对主浮体姿态的影响。
本实施例中所述凯夫拉缆31上部呈y型与所述主浮体框架21固定,所述凯夫拉缆31下部双并联安装有两组声学释放器32,以确保潜标的可靠回收。所述波浪能滑翔器1可搭载选用气象测量传感器、姿态传感器和位置传感器,所述气象测量传感器包括气温、气压、风速和风向传感器。所述凯夫拉缆31可安装包括具有感应耦合功能的温度仪、温深仪和温盐深仪。
本实施例提供的基于波浪能滑翔器的水下实时观测系统观测范围大,在一套观测系统中,通过潜标与波浪滑翔器分别实现海洋垂向剖面与表层区域海气界面观测,满足了对应指标的观测需求;本实施例提供的基于波浪能滑翔器的水下实时观测系统布放简单,波浪滑翔器与潜标无线线缆连接,同时同地点布放难度小,安全性高。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。