1.本发明涉及无人艇技术领域,具体涉及一种可快速布放的刚柔耦合折叠充气式双体无人艇。
背景技术:
2.近年来,随着世界海洋经济的蓬勃发展,商船运输活动日益频繁,海上安全航行压力与风险也显著提升,然而,目前海军护航存在巡逻海域面积大、成本高、军舰少,部分海域处于巡逻真空,海盗身份真假难辨,难以遏制等问题,随着海上航行风险的愈发加剧,亟需一种快速高效的船舶护航方式,而无人艇可作为解决这一问题的有效方法。
3.水面无人艇是一种无人操作且可远程操控的水面舰艇,主要用于执行不适宜有人船只执行的危险任务,具有运动灵活、适用广泛、自主航行的特点,目前水面无人艇在海洋气象监测、地球物理勘探、环境监测、搜救应急响应的海事应用中已经发挥着十分重要的作用。
4.由于护航任务的时效性以及特殊性,对无人艇的布放时效性、设计与建造技术均提出较高要求。在利用无人艇进行船舶护航、防卫等方面,美国、英国、以色列等国家已有多种型号无人艇已实际部署或已处于试验测试阶段。但是上述各国针对无人艇技术进行严格保密并进行技术封锁,核心技术外界无法掌握。
5.国内无人艇技术在协同执行护航任务领域尚未有实际部署,国内现存单体无人艇的主要缺陷体现在稳定性能较差,调节能力单一,不能满足复杂海域的作业要求。现存双体无人艇亦大多存在布放速度缓慢、续航能力差、运输储备不便、机动性能差等问题。且现存无人艇大都使用柴油为主动力,防水特性不足,难以实现快速布放。
6.因此,为了满足复杂恶劣海况下护航任务的更多需求,在进行无人艇设计的时候需要着重考虑艇体结构、艇体稳性、耐波性、航向稳定性以及防弹耐压性,有必要研制出一种在存储时能够以折叠方式减小体积,在使用时能够快速布放的水面双体无人艇。
技术实现要素:
7.针对上述现有技术,本发明提出一种提供一种既无冗余误差参数,又可显式获取串、并、混联运动链中所有具有明确物理意义的相互独立的几何误差参数及其对末端位姿误差的线性映射规律,还可同时为机器人精度设计与运动学标定提供理论模型的基于旋量理论的机器人无冗余几何误差模型解析建模方法。
8.为了解决上述技术问题,本发明提出的一种可快速布放的刚柔耦合折叠充气式双体无人艇,包括连接部件,所述连接部件的上方设置有用于安装通信控制单元的刚性承载部件,所述连接部件的下方布置有两个相互平行的艇体,两个艇体的结构相同,所述艇体由内部可折叠刚性结构和外部可充气柔性结构组成,所述内部可折叠刚性结构包括可折叠的前侧部件和后侧部件;所述内部可折叠刚性结构的下方设有蓄电池;所述外部可充气柔性结构包括分别包裹在所述前侧部件和后侧部件的前侧气囊和后侧气囊,所述前侧气囊和后
侧气囊内均设有可以产生气体的化学品;所述艇体底部后侧设有推进器,所述推进器采用金属喷泵推进器;所述刚性承载部件包括安装座和壳体,所述通信控制单元包括控制模块、定位导航模块、通信模块和数据采集模块,所述定位导航模块、通信模块和数据采集模块分别与所述控制模块连接,所述控制模块与设置在岸上或母船上的控制站控连接;所述连接部件为可充气柔性连接部件,所述可充气柔性连接部件采用镂空穿浪式设计,所述可充气柔性连接部件的内部设有可以产生气体的化学品和用于连接通信控制单元和推进器电动水泵的电缆。
9.进一步讲,本发明所述的可快速布放的刚柔耦合折叠充气式双体无人艇,其中:
10.所述艇体中的前侧部件和后侧部件的折叠方向为沿底部对折。
11.所述艇体中的前侧部件和后侧部件符合水密设计要求。
12.所述艇体中的前侧部件和后侧部件均采用玻璃钢材质。
13.所述艇体中的前侧气囊和后侧气囊及所述可充气柔性连接部件均采用芳纶外涂敷橡胶复合膜材设计,且具备耐压防弹性能。
14.所述艇体中的前侧气囊和后侧气囊及所述可充气柔性连接部件均采用分布式高压气囊及外层耐压复合薄膜设计,入水后能够快速分布充气展开,且气体源由化学反应产生。
15.当无人艇投放于水中,触发充气功能,首先触发艇体中前侧气囊和后侧气囊内部化学品发生反应,产生气体,接着触发可充气柔性连接部件内部化学品发生反应,产生气体进行充气;产生气体化学反应式为:
16.2nan3 cuo
→
na2o 3n2 cu。
17.与现有技术相比,本发明的有益效果是:
18.(1)本发明采用刚柔耦合船体设计组成超轻型、水动力性能良好的双体船型,既减轻了无人艇的重量,又优化了无人艇整体结构,两艇体通过可充气柔性结构相连接,使得无人艇在水中更加平稳,两船体中均配备电推进系统,可同时达到调整航速与航行状态,使得无人艇的调节能力大大增强。
19.(2)本发明能够通过折叠的方式减小体积,方便储存和运输,实现快速布放。
20.(3)本发明采取低重心设计,稳定性较好不易倾覆,并且各部件由于水密设计且相互独立,能够保证艇体倾覆时也不进水,抗沉性能优越。倾覆状态下,本发明初稳性高度较低,较小的外力作用干扰如风、浪、流便可以便可使本发明自主翻身扶正。
21.(4)本发明刚体部件均选用质量轻、强度大的玻璃钢,充气部件均选用轻型芳纶材料,具有一定的防弹能力,并且能够大大减轻船体重量,增强续航能力、有效提升船速。
22.(4)本发明连接桥上部空间宽敞,可根据实际使用功能搭载不同设备,使得本发明成为一个通用的无人艇平台,扩大了本发明的应用范围。
附图说明
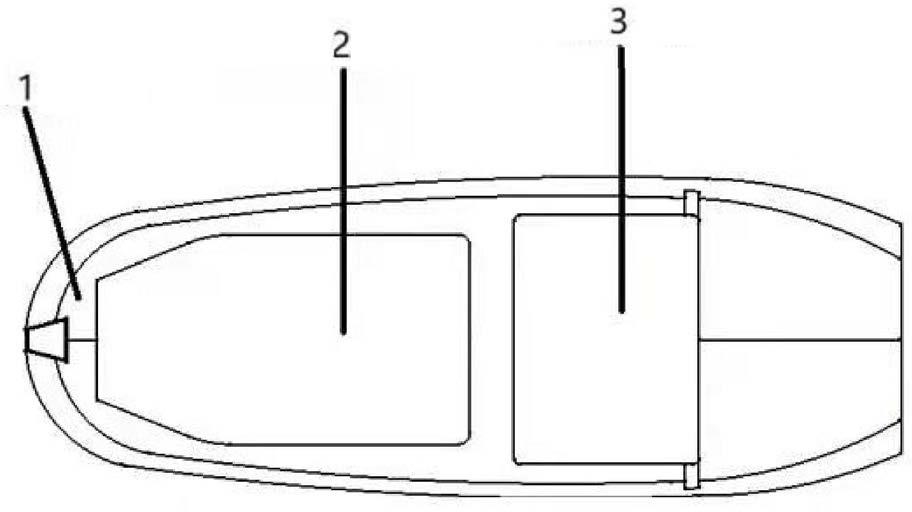
23.图1是本发明可快速布放的刚柔耦合折叠充气式双体无人艇的外形结构示意图;
24.图2是本发明无人艇的左右艇体结构示意图;
25.图3是本发明无人艇的上部结构示意图;
26.图4是本发明无人艇的折叠状态立体结构示意图;
27.图5是本发明无人艇的折叠状态主视结构示意图;
28.图6是本发明无人艇的折叠状态侧视结构示意图;
29.图7是本发明无人艇的折叠状态俯视结构示意图;
30.图中:
[0031]1‑
艇体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
可充气柔性连接部件
[0032]3‑
刚性承载部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4‑
金属喷泵推进器
[0033]
11
‑
前侧气囊
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
‑
后侧气囊
[0034]
13
‑
前侧结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
‑
后侧结构
[0035]
15
‑
蓄电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
‑
超声波传感器
[0036]
32
‑
摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
‑
视频传输天线
[0037]
34
‑
gnss信号接收机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35
‑
gnss天线
[0038]
36
‑
数据传输天线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
37
‑
壳体
[0039]
38
‑
扩音器
具体实施方式
[0040]
本发明无人艇的设计思路是:该无人艇的艇身采用刚柔耦合船体设计,包括两个平行布置的可折叠的艇体、用于安装通信及控制单元的上部结构和连接部件三部分,艇体内部设有蓄电池,艇体底部后侧设有推进器;所述艇体的刚性结构部分可实现折叠,其刚性结构的外部包裹有可充气结构,两个艇体之间也是通过连接部件相连;所述连接部件为柔性可充气结构;所述推进器为金属喷泵推进器;所述连接部件的上侧与上部结构相连,上部结构设有壳体,壳体内及上侧设有任务载荷,包括电子磁罗盘、智能陀螺仪、超声波传感器、控制模块、数据传输天线、数据传输电台、gnss天线、gnss信号接收机、摄像头、视频传输天线、视频传输电台、扩音器。
[0041]
下面结合附图及具体实施例对本发明做进一步的说明,但下述实施例绝非对本发明有任何限制。
[0042]
如图1所示,本发明提出的一种可快速布放的刚柔耦合折叠充气式双体无人艇,包括连接部件,所述连接部件为可充气柔性连接部件2,所述连接部件的上方设置有用于安装通信控制单元的刚性承载部件3,所述连接部件的下方布置有两个相互平行的可折叠的艇体1,所述艇体下侧后部配备推进器,所述推进器采用金属喷泵推进器4。可以看出,由于连接部件的主体轮廓呈上小下大的三角形框架,该无人艇为低重心设计,稳定性较好不易倾覆。双艇体之间采用连接桥设计,各部件均进行水密性设计且各部件之间均相互独立。各充气结构以及连接部件均进行水密设计,且两两之间相互独立,某一部分破损进水不影响其他部分的水密性,能够极大增强该无人艇的抗沉性。
[0043]
本发明中,两个艇体1的结构相同,如图2所示,所述艇体1由内部可折叠刚性结构和外部可充气柔性结构组成,所述内部可折叠刚性结构包括可折叠的前侧部件13和后侧部件14,折叠方向为沿底部对折,其设计符合水密设计要求。所述内部可折叠刚性结构的下方设有蓄电池15,所述蓄电池15配备在艇体的底部,能够显著降低船体重心,增强航行稳定性。前侧部件13和后侧部件14的材质采用玻璃钢材质,且按需求变形塑造并进行水密设计,达到保护蓄电池的目的。所述外部可充气柔性结构包括分别包裹在所述前侧部件13和后侧
部件14的前侧气囊11和后侧气囊12,其材质为轻型芳纶复合材料。所述前侧气囊11和后侧气囊12内均设有可以产生气体的化学品;所述艇体1中的前侧气囊11和后侧气囊12均采用芳纶外涂敷橡胶复合膜材设计,且具备耐压防弹性能,且轻型芳纶材料能够有效大幅减轻整体重量。最好是采用分布式高压气囊及外层耐压复合薄膜设计,入水后能够快速分布充气展开,且气体源由化学反应产生。
[0044]
如图1、图4至图7所示,所述连接部件为可充气柔性连接部件2,为刚体结构与柔性结构相结合,且对柔性结构采用镂空穿浪式设计,使得连接部件结构受力面积小,能够降低海浪等外界因素对无人艇稳定性的影响;上部的刚性结构与刚性承载部件3的安装座相连。两个所述艇体1通过该连接部件相连,所述可充气柔性连接部件2的内部设有可以产生气体的化学品,所述可充气柔性连接部件2也采用芳纶外涂敷橡胶复合膜材设计,且具备耐压防弹性能。最好是采用分布式高压气囊及外层耐压复合薄膜设计,入水后能够快速分布充气展开,且气体源由化学反应产生。
[0045]
如图3至图7所示,本发明中,所述刚性承载部件3包括安装座和壳体37,所述通信控制单元包括控制模块、定位导航模块、通信模块和数据采集模块,本发明通过设置在岸上或母船上的控制站对无人艇进行控制,所述定位导航模块、通信模块和数据采集模块分别与所述控制模块连接,所述控制模块设置在所述壳体37内,所述控制模块与设置在岸上或母船上的控制站控连接。所述可充气柔性连接部件2的内部还设有用于连接通信控制单元和推进器电动水泵的电缆。
[0046]
本发明中的通信控制单元中,所述定位导航模块包括gnss天线35和gnss信号接收机34,gnss天线35与gnss信号接收机34相连,所述的gnss信号接收机34与所述的控制模块相连,gnss信号接收机用以接收导航信号,gnss天线用以转发系统导航信号。
[0047]
所述通信模块包括数据传输天线36、数据传输电台、视频传输天线33、视频传输电台。所述的数据传输电台与视频传输电台分别设置在壳体37内,数据传输天线36与数据传输电台相连,视频传输天线33与视频传输电台相连,所述的数据传输电台和视频传输电台分别与所述的控制模块连接;所述数据传输天线36用于远距离传输控制信号及探测信号,所述视频传输天线33用于远距离传输视频图像数据。
[0048]
所述数据采集模块包括摄像头32、超声波传感器31、电子磁罗盘和智能陀螺仪,所述摄像头32设置在所述壳体37的上侧前部,所述超声波传感器31设置在所述壳体37内部的前侧,所述电子磁罗盘与智能陀螺仪均设置于所述壳体37内;所述摄像头32、超声波传感器31、电子磁罗盘和智能陀螺仪分别与壳体37内部的所述控制模块连接。所述摄像头32可360度环视捕获无人艇周边环境实时图像信息,所述超声波传感器32可基于测距原理用于无人艇避障,所述电子磁罗盘可用于测定无人艇航向,所述智能陀螺仪可用于测定无人艇姿态。
[0049]
如图4至图7所示,本发明能够通过折叠的方式减小体积,方便储存和运输。
[0050]
实施例1:
[0051]
本发明的可快速布放的刚柔耦合折叠充气式双体无人艇,可充气柔性结构采用高频热焊接技术形成多独立舱室结构,两两之间相互独立,某一部分破损进水不影响其他部分的水密性,能够极大增强该无人艇的抗沉性。当无人艇投放于水中,触发充气功能,首先触发艇体中前侧气囊11和后侧气囊12内部化学品发生反应,产生气体,接着触发可充气柔性连接部件2内部化学品发生反应,产生气体进行充气。产生气体化学反应式为:
[0052]
2nan3 cuo
→
na2o 3n2 cu
[0053]
本发明中分布式气囊(即艇体的前侧气囊11、后侧气囊12及连接部件2的柔性气囊部分)的设计参数如下:
[0054]
无人艇艇体前侧气囊11的体积为0.145m3,满足所需刚性压强需达3.5atm,需产期物质量1.59kg;后侧气囊12的体积为0.151m3,满足所需刚性压强需达3.5atm,需产期物质量1.65kg;连接部件2的气囊体积为0.205m3,满足所需刚性压强需达4.2atm,需产期物质量2.62kg;
[0055]
当无人艇充气完毕,控制站向通信导航设备发出航速指令,通信设备将航速指令反馈给控制模块,控制模块向金属喷泵推进器给定相应航速电压,两台推进器产生向前的推力使无人船向前运动,无人艇航速达到给定值附近逐渐稳定,保持航向直线航行;当控制站发出转向指令时,控制模块分别向左右两台推进器给定大小不同的电压,从而左右两舷产生大小不同的推力,从而改变无人艇航向,到达预定航向后,无人艇保持航向直线航行。同时,控制模块将无人艇的实时位置、航向、姿态等信息以及摄像设备捕获的图像传输至控制站。
[0056]
本发明工作状态下可利用扩音器38进行威慑喊话,自主撞击等多种方式实现无人艇拦截技术,完成自主拦截等护卫业务。
[0057]
综上,本发明的双体无人艇,通过将艇体刚体、可充气柔性结构、推进设备、连接部件、各类传感器及控制器等任务载荷设备集成为一体,能够通过折叠的方式减小体积,方便储存和运输,实现快速布放。并且本发明采用轻量化、低重心设计,稳定性良好,具有抗倾覆的能力,能够保证在高海况下有效、高速航行。此外,艇身柔性结构所采用材料具有耐压防弹性能,能够用于执行安防巡逻、调查缉私、战斗警戒等危险任务。
[0058]
尽管上面结合附图对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以做出很多变形,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。