一种co2跨临界并行压缩制冷系统及控制方法
【技术领域】
1.本发明属于制冷与低温技术领域,特别涉及一种co2跨临界并行压缩制冷系统及控制方法。
背景技术:
2.随着社会发展和科技进步,热泵空调在人们的生产生活中发挥了重大作用。传统的cfcs和hcfcs、hfcs类制冷剂因为其优异的热力性质在制冷空调领域得到广泛应用,但是氟利昂类制冷剂的odp和gwp高,使得自然工质替代氟利昂类制冷剂成为发展的一大趋势。
3.co2具备优异的传热性能,且具有不可燃性、无毒性,空调循环工作在高压区,具有较低的比体积,可以减小设备的体积。近年来,跨临界co2循环受到广泛关注,但是制冷剂在气体冷却器中的不等温冷却、高的节流损失以及高的蒸气过热使得单级压缩单级冷却的跨临界co2循环效率仍然比传统氟利昂类制冷剂低。co2并行压缩系统增设辅助压缩机,采用多级节流改进循环,可以实现降低排气温度和减小排气压力,且多级节流减小系统的节流不可逆损失,在改进循环效率上具有深远作用,在环境温度较低地区的商业超市得到广泛应用。但是影响co2跨临界并行压缩制冷循环效率的因素众多,包括排气压力、中间压力、体积流量比等,且各变量之间相互影响,至今还未解决co2并行压缩系统高性能工作运行的控制问题。
技术实现要素:
4.本发明的目的在于提供一种co2跨临界并行压缩制冷系统的控制方法,以解决并行压缩系统最优排气压力、中间压力、体积流量比的寻优问题,以及实际运行过程中,因环境温度改变,系统偏离性能最优的工况点的问题。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种co2跨临界并行压缩制冷系统,包括:主路跨临界co2循环和支路近临界co2循环装置;
7.主路跨临界co2循环装置包括依次循环连接的主压缩机、气体冷却器、回热器、主路节流阀、蒸发器和气液分离器;气液分离器的气体出口连接主压缩机的吸气口;
8.支路近临界co2循环包括支路节流阀以及辅助压缩机;回热器的出口旁通一路经支路节流阀、回热器、辅助压缩机连接主压缩机的吸气口。
9.一种co2跨临界并行压缩制冷系统的控制方法,包括以下步骤:
10.s1、对权利要求1所述的co2跨临界并行压缩制冷系统进行性能测试,获得cop的预测公式;
11.s2、采集环境温度信号在线优化求解得到不同环境温度下的最优工作状态对应的最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号;
12.s3、将最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号传递给pid控制器作用控制,控制所述co2跨临界并行压缩制冷系统在最优工作状态。
13.本发明进一步的改进在于:所述的最优工作状态为co2跨临界并行压缩制冷系统稳定运行时制冷cop最高时对应的排气压力、中间压力、辅助压缩机的体积流量和主压缩机的体积流量比。
14.本发明进一步的改进在于:所述对co2跨临界并行压缩制冷系统进行性能测试,获得cop的预测公式的步骤,具体包括:
15.对co2跨临界并行压缩制冷系统进行性能测试,测试环境温度从25℃至50℃间隔5℃变化,在不同的环境温度下,排气压力从8mpa至13mpa间隔0.1mpa变化,中间压力从5mpa至7.5mpa间隔0.1mpa变化,体积流量比通过调节主压缩机和辅助压缩机转速控制在0.2~0.8间隔0.05变化;得到不同工况条件下对应的系统cop;
16.对采集得到的数据集进行数据预处理,然后进行归一化处理,线性映射至区间[0 1];环境温度线性映射表示为式(1);式(1)中t
air
(i)表示环境温度数据集中的第i个测试数据,和分别表示环境温度数据集中最小值和最大值,t
air
′
(i)表示映射后的环境温度数据集中的第i个测试数据;
[0017]
排气压力线性映射表示为式(2);式(2)中p
out
(i)表示排气压力数据集中的第i个测试数据,和分别表示排气压力数据集中最小值和最大值,p
out
′
(i)表示映射后的排气压力数据集中的第i个测试数据;
[0018]
中间压力线性映射表示为式(3);式(3)中p
mid
(i)表示中间压力数据集中的第i个测试数据,和分别表示中间压力数据集中最小值和最大值,p
mid
′
(i)表示映射后的中间压力数据集中的第i个测试数据;
[0019]
体积流量比线性映射表示为式(4);式(4)中η(i)表示体积流量比数据集中的第i个测试数据,η
min
和η
max
分别表示体积流量比数据集中最小值和最大值,η
′
(i)表示映射后的体积流量比数据集中的第i个测试数据;
[0020]
cop线性映射表示为式(5);式(5)中cop(i)表示cop数据集中的第i个测试数据,cop
min
和cop
max
分别表示cop数据集中最小值和最大值,cop
′
(i)表示映射后的cop数据集中的第i个测试数据;
[0021][0022][0023][0024][0025][0026]
本发明进一步的改进在于:所述数据预处理具体为剔除采集得到的数据集中无法稳定运行的工况数据点以及因采集或记录发生错误的数据。
[0027]
本发明进一步的改进在于:所述对co2跨临界并行压缩制冷系统进行性能测试,获得cop的预测公式的步骤,还包括:
[0028]
建立多层神经网络模型,模型的输入信号为映射后的环境温度t
air
′
、排气压力p
out
′
、中间压力p
mid
′
、体积流量比η
′
,输出信号为映射后的系统制冷cop
′
,隐含层的激励函数选择为sigmoid函数,见式(6);单个神经元收到来自其他神经元传递过来的输入信号x
i
,将输入信号带权值w
i
连接进行传递,神经元接受到的总输入值与阈值θ比较后,通过激活函数处理产生神经元的输出y,表达式见式(7);
[0029][0030]
y=f(∑
i
w
i
x
i
‑
θ)
ꢀꢀꢀꢀꢀꢀꢀ
(7)。
[0031]
本发明进一步的改进在于:输入层和隐含层之间、隐含层与输出层之间的连接权值和阈值通过以下步骤获得:
[0032]
将工况及性能数据集的部分数据作为训练集,采用正则化的误差逆传播算法拟合权值和阈值;
[0033]
多层神经网络模型隐含层层数通过以下步骤确定:
[0034]
将工况及性能数据集中其余数据作为神经网络模型的测试集,测试集中工况性能预测cop
′
p
和实际cop
′
之间的均方根误差作为模型泛化误差的评价指标,泛化误差表达式见式(8),式中m表示测试集样本数;调整隐含层层数进行模型训练和预测,选择泛化误差最小的模型参数;模型的输出通过反归一化,见式(9),得到预测cop;
[0035][0036]
cop(i)=(cop
max
‑
cop
min
)
·
cop
′
p
(i) cop
min
ꢀꢀꢀꢀ
(9)
[0037]
由上述步骤得到系统cop的预测公式:
[0038]
cop=f(t
air
,p
out
p
mid
,η)
ꢀꢀꢀꢀ
(10)。
[0039]
本发明进一步的改进在于:所述的最优工作状态,通过采集环境温度信号,在线优化求解得到不同工况下系统的最优工作状态;
[0040]
采集环境温度信号,代入得到的cop预测公式,求解最优的cop问题转化为以cop最大为目标函数,求解排气压力、中间压力、体积流量比在定义域内的目标函数cop最大值;排气压力的取值范围为8mpa~13mpa,中间压力的取值范围为5~7.5mpa,体积流量比的取值范围为0.2~0.8;
[0041]
采用梯度上升法求解cop的最大值,设x=(p
out
,p
mid
,η),设算法求解的初始向量值x0=(8,5,0.2),排气压力、中间压力以及体积流量比的迭代更新规则见式(11)、(12)、(13);式中α表示学习因子;
[0042][0043]
[0044][0045]
更新规则中的指定点(p
′
out
,p
′
mid
,η
′
)偏导数求解采用样条函数法计算,的求解,固定中间压力和体积流量比,排气压力从8mpa至13mpa间隔0.1mpa,调用式(10)得到固定中间压力和体积流量比条件下,不同排气压力对应的cop值,采用三次样条函数法拟合cop和排气压力的关系式见式(14),在指定点cop关于排气压力p
′
out
的偏导数见式(15);的求解,固定排气压力和体积流量比,中间压力从5mpa至7.5mpa间隔0.1mpa,调用式(10)得到固定排气压力和体积流量比条件下,不同中间压力对应的cop值,采用三次样条函数法拟合cop和中间压力的关系式见式(16),在指定点cop关于排气压力p
′
mid
的偏导数见式(17);的求解,固定排气压力和中间压力,体积流量比从0.2至0.8间隔0.1,调用式(10)得到固定排气压力和中间压力条件下,不同体积流量比对应的cop值,采用三次样条函数法拟合cop和体积流量比的关系式见式(18),在指定点cop关于排气压力η
′
的偏导数见式(19):
[0046]
cop=g1(p
out
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0047][0048]
cop=g2(p
mid
)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0049][0050]
cop=g3(η)
ꢀꢀꢀꢀꢀꢀꢀ
(18)
[0051][0052]
迭代求解得到对应环境温度下的最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号;将控制信号传递给pid控制器作用控制。
[0053]
本发明进一步的改进在于:所述pid控制器的设计,采用主路节流阀开度d1控制排气压力见式(20)、支路节流阀开度d2控制中间压力见式(21)、辅助压缩机转速w控制体积流量比见式(22);求解得到的控制目标信号传递给pid控制器作为控制目标:
[0054][0055][0056][0057]
相对于现有技术,本发明具有以下有益效果:
[0058]
本发明co2跨临界并行压缩制冷系统包括主路跨临界co2循环和支路近临界co2循环,制冷剂co2经过同一个气体冷却器后分流,由主压缩机和辅助压缩机压缩排气后再混
合;系统消耗功率为主压缩机和辅助压缩机功耗之和,系统的制冷量为蒸发器的吸热量,可由此求得系统的制冷cop。
[0059]
本发明考虑到co2跨临界制冷系统中,最优排气压力对系统性能的影响,准确地确定系统的最优排气压力对于系统性能的提升具有重要意义。
[0060]
本发明考虑到并行压缩制冷系统中,中间压力以及体积流量比对于系统性能的影响,有利于进一步提升系统性能。
[0061]
本发明考虑到co2跨临界并行压缩系统中,支路循环不仅仅影响系统的性能,同时也会影响最优排气压力的大小,考虑支路循环的状态,有利于最优排气压力的准确确定。
[0062]
本发明考虑到实际制冷系统和设计的制冷系统之间存在差异,传统的最优排气压力经验公式不具备良好的泛化能力,利用机组运行数据建立的神经网络预测模型更加适合机组的运行控制。
[0063]
本发明考虑到系统控制的稳定性要求,和传统的pid控制相结合,可以确保系统在不同工况下具有良好的性能同时保持同时符合稳定性要求,具有实际工程应用价值。
[0064]
本发明适合于不同的环境温度工作情况,依照该方法可以使得系统在实际运行过程中保证系统性能最优。
【附图说明】
[0065]
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0066]
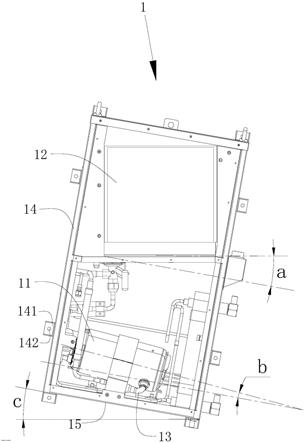
图1为本发明适用的co2跨临界并行压缩制冷系统的结构示意图;
[0067]
图2为本发明一种co2跨临界并行压缩制冷系统的控制方法的流程图。
【具体实施方式】
[0068]
下面结合附图对本发明作进一步详细说明。
[0069]
实施例1
[0070]
请参阅图1所示,本发明提供一种co2跨临界并行压缩制冷系统,包括:主路跨临界co2循环和支路近临界co2循环装置。
[0071]
主路跨临界co2循环装置包括依次循环连接的主压缩机11、气体冷却器12、回热器13、主路节流阀14、蒸发器15和气液分离器16。
[0072]
支路近临界co2循环包括支路节流阀22以及辅助压缩机21;co2经过回热器13后旁通一路进入支路循环,经支路节流阀22节流,然后进入回热器13热交换后进入辅助压缩机21压缩,然后合并进入主路循环中的气体冷却器12中散热。
[0073]
实施例2
[0074]
请参阅图2所示,本发明还提供实施例1所述的一种co2跨临界并行压缩制冷系统的控制方法。本发明一种co2跨临界并行压缩制冷系统的最优工作状态为系统稳定运行时制冷cop最高时对应的气体冷却器12进口压力即排气压力、辅助压缩机21吸气压力即中间压力以及辅助压缩机21的体积流量和主压缩机11的体积流量之比即体积流量比;所述的最优工作状态通过以下步骤获得:
[0075]
s1、对co2跨临界并行压缩制冷系统进行性能测试,获得cop和环境温度t
air
、排气
压力p
out
、中间压力p
mid
、体积流量比η的函数关系;:
[0076]
对co2跨临界并行压缩制冷系统进行性能测试,测试环境温度从25℃至50℃间隔5℃变化,在不同的环境温度下,排气压力从8mpa至13mpa间隔0.1mpa变化,中间压力从5mpa至7.5mpa间隔0.1mpa变化,体积流量比通过调节主压缩机11和辅助压缩21转速控制在0.2~0.8间隔0.05变化;各控制变量排列组合实现全工况性能测试,得到不同工况条件下对应的系统cop;
[0077]
对采集得到的数据集进行数据预处理,剔除无法稳定运行的工况数据点以及因采集或记录发生错误的数据;因各变量之间存在量纲以及取值范围的差异,对采集的环境温度、排气压力、中间压力以及体积流量比和cop数据进行归一化处理,线性映射至区间[0 1];
[0078]
环境温度线性映射表示为式(1);式(1)中t
air
(i)表示环境温度数据集中的第i个测试数据,和分别表示环境温度数据集中最小值和最大值,t
air
′
(i)表示映射后的环境温度数据集中的第i个测试数据;
[0079]
排气压力线性映射表示为式(2);式(2)中p
out
(i)表示排气压力数据集中的第i个测试数据,和分别表示排气压力数据集中最小值和最大值,p
out
′
(i)表示映射后的排气压力数据集中的第i个测试数据;
[0080]
中间压力线性映射表示为式(3);式(3)中p
mid
(i)表示中间压力数据集中的第i个测试数据,和分别表示中间压力数据集中最小值和最大值,p
mid
′
(i)表示映射后的中间压力数据集中的第i个测试数据;
[0081]
体积流量比线性映射表示为式(4);式(4)中η(i)表示体积流量比数据集中的第i个测试数据,η
min
和η
max
分别表示体积流量比数据集中最小值和最大值,η
′
(i)表示映射后的体积流量比数据集中的第i个测试数据;
[0082]
cop线性映射表示为式(5);式(5)中cop(i)表示cop数据集中的第i个测试数据,cop
min
和cop
max
分别表示cop数据集中最小值和最大值,cop
′
(i)表示映射后的cop数据集中的第i个测试数据;
[0083][0084][0085][0086][0087][0088]
建立多层神经网络模型,模型的输入信号为映射后的环境温度t
air
′
、排气压力p
out
′
、中间压力p
mid
′
、体积流量比η
′
,输出信号为映射后的系统制冷cop
′
,隐含层的激励函
数选择为sigmoid函数,见式(6);单个神经元收到来自其他神经元传递过来的输入信号x
i
,将输入信号带权值w
i
连接进行传递,神经元接受到的总输入值与阈值θ比较后,通过激活函数处理产生神经元的输出y,表达式见式(7);待定多层神经网络模型隐含层层数以及输入层和隐含层之间、隐含层与输出层之间的连接权值和阈值;
[0089][0090]
y=f(∑
i
w
i
x
i
‑
θ)
ꢀꢀꢀꢀꢀ
(7)
[0091]
权值和阈值的求取,将工况及性能数据集的70%的数据作为训练集,采用正则化的误差逆传播算法拟合权值和阈值,并防止系统性能预测模型的过拟合现象发生;隐含层层数的确定,将其余的30%数据作为神经网络模型的测试集,测试集中工况性能预测cop
′
p
和实际cop
′
之间的均方根误差作为模型泛化误差的评价指标,泛化误差表达式见式(8),式中m表示测试集样本数;调整隐含层层数进行模型训练和预测,选择泛化误差最小的模型参数。模型的输出通过反归一化,见式(9),得到预测cop。
[0092][0093]
cop(i)=(cop
max
‑
cop
min
)
·
cop
′
p
(i) cop
min
ꢀꢀꢀꢀ
(9)
[0094]
由上述步骤可得到系统cop的预测公式,见式(10)。
[0095]
cop=f(t
air
,p
out
,p
mid
,η)
ꢀꢀꢀꢀ
(10)
[0096]
s2、采集环境温度信号在线优化求解得到不同环境温度下的最优工作状态对应的最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号:
[0097]
采集环境温度信号,代入得到的cop预测公式(10)可知,系统稳定运行时,cop和工作状态的关系满足式(10)。求解最优的cop问题转化为以cop最大为目标函数,求解排气压力、中间压力、体积流量比在定义域内的目标函数cop最大值。排气压力的取值范围为8mpa~13mpa,中间压力的取值范围为5~7.5mpa,体积流量比的取值范围为0.2~0.8。
[0098]
采用梯度上升法求解cop的最大值,设x=(p
out
,p
mid
,η),设算法求解的初始向量值x0=(8,5,0.2),排气压力、中间压力以及体积流量比的迭代更新规则见式(11)(12)(13);式中α表示学习因子,用于确定迭代过程每一步的变化长度,调节学习因子以及迭代次数控制求解的精度和速度;
[0099][0100][0101][0102]
更新规则中的指定点(p
′
out
,p
′
mid
,η
′
)偏导数求解采用样条函数法计算,的求解,固定中间压力和体积流量比,排气压力从8mpa至13mpa间隔0.1mpa,调用式(10)得到固定中间压力和体积流量比条件下,不同排气压力对应的cop值,采用三次样条函数法拟合
cop和排气压力的关系式见式(14),在指定点cop关于排气压力p
′
out
的偏导数见式(15);的求解,固定排气压力和体积流量比,中间压力从5mpa至7.5mpa间隔0.1mpa,调用式(10)得到固定排气压力和体积流量比条件下,不同中间压力对应的cop值,采用三次样条函数法拟合cop和中间压力的关系式见式(16),在指定点cop关于排气压力p
′
mid
的偏导数见式(17);的求解,固定排气压力和中间压力,体积流量比从0.2至0.8间隔0.1,调用式(10)得到固定排气压力和中间压力条件下,不同体积流量比对应的cop值,采用三次样条函数法拟合cop和体积流量比的关系式见式(18),在指定点cop关于排气压力η
′
的偏导数见式(19)。
[0103]
cop=g1(p
out
)
ꢀꢀꢀꢀꢀ
(14)
[0104][0105]
cop=g2(p
mid
)
ꢀꢀꢀꢀ
(16)
[0106][0107]
cop=g3(η)
ꢀꢀꢀꢀꢀ
(18)
[0108][0109]
通过上述方法,迭代求解得到该环境温度下的最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号;
[0110]
s3、将最优排气压力p
out_t
、中间压力p
mid_t
以及体积流量比η
t
的控制目标信号传递给pid控制器作用控制,控制所述co2跨临界并行压缩制冷系统在最优工作状态:
[0111]
pid控制器的设计,采用主路节流阀开度d1控制排气压力,见式(20)、支路节流阀开度d2控制中间压力,见式(21)、辅助压缩机转速w控制体积流量比,见式(22);求解得到的控制目标信号传递给pid控制器作为控制目标,调节pid参数使得系统控制稳定。
[0112][0113][0114][0115]
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。