1.本发明属于飞行器导航、制导与控制技术领域,具体涉及一种基于深度学习故障诊断的飞行器分层容错控制方法。
背景技术:
2.飞行器(flight vehicle)是指在大气层内或大气层外空间(太空)飞行的器械,可以分为航空器、航天器、火箭和导弹等几种类别,近年来广泛应用于军用和民用领域。飞行器在复杂的飞行环境和长航时飞行任务下,由于部件的老化和烧蚀,执行机构不可避免会出现故障。如何设计具有优异容错性能的姿态控制系统,使飞行器在执行机构出现故障时,仍尽可能地完成飞行任务,避免飞行事故的发生,一直是学者们亟待解决的问题。
3.对于飞行器的容错控制问题而言,由于姿态系统中存在的强非线性、强耦合性、参数不确定性、参数时变性和存在外界干扰等问题,并未有一种有效的方法将执行机构的故障信息从这类多源复合干扰中提取出来。因此,基于观测器补偿的容错控制方法受到了研究人员的青睐,即,将执行机构故障与参数不确定性和外界干扰等因素一同视作系统的集总扰动,采用干扰观测器进行补偿,以实现飞行器在执行机构故障条件下的稳定控制。
4.然而,这类基于观测器补偿的传统容错控制方法,并未考虑执行机构在故障条件下的实际健康状态,尤其是对于过驱动飞行器,虽然在控制层考虑了对执行机构故障的补偿,但是在控制分配层,由于没有有效的从多源复合干扰中提取执行机构的故障信息的方法,无法考虑执行机构的实际健康状态,难以避免地会引起执行机构饱和、无法产生期望控制力矩等现象,严重影响了控制器的容错性能以及控制性能。
5.所以,在多源复合干扰作用下提取执行机构的故障信息并用于控制分配以及控制律设计是目前飞行器容错控制面临的挑战性的难题。
技术实现要素:
6.本发明为了突破现有容错控制方法无法有效从多源复合干扰中提取执行机构的故障信息的瓶颈,以及为了弥补由此导致的期望控制力矩无法产生、容错性能较差等缺点,结合新一代人工智能的最新研究成果,提出一种基于深度学习故障诊断的飞行器分层容错控制方法;具体包括如下步骤:
7.步骤一、建立飞行器绕质心运动的非线性运动学模型和动力学模型;
8.非线性运动学模型如下:
[0009][0010]
动力学模型如下:
[0011][0012]
式中,α表示飞行器的攻角,β表示飞行器的侧滑角,γ
s
表示飞行器的倾侧角;w
x
表示飞行器的滚转角速率,w
y
表示飞行器的侧滑角速率,w
z
表示飞行器的俯仰角速率;m表示飞行器质量;v表示飞行器速度;θ表示飞行器的弹道倾角;l表示飞行所受升力,l=qsc
l
,其中,q=ρv2/2表示动压,s为飞行器参考面积,c
l
表示升力系数;z表示飞行所受侧力,z=qsc
z
,c
z
表示侧力系数;i
xx
表示绕x轴的转动惯量,i
yy
表示绕y轴的转动惯量,i
zz
表示绕z轴的转动惯量,i
xy
表示x与y轴的惯量积;m
x
表示飞行器所受滚转力矩,m
y
表示飞行器所受偏航力矩,m
z
表示飞行器所受俯仰力矩;g表示飞行器所在位置的重力加速度。
[0013]
步骤二、将飞行器绕质心运动的非线性运动学和动力学模型进行改写,得到仿射非线性形式用于设计控制器;
[0014][0015]
其中,姿态环的状态ω=[α,β,γ
s
]
t
,角速率环的状态ω=[w
x
,w
y
,w
z
]
t
;μ表示由气动舵面操纵产生的气动力矩项;气动舵面操纵产生的气动力矩项;表示与气动舵面相关的气动力矩系数矩阵,b表示飞行器翼展,为由气动舵面引起的滚转力矩系数矩阵,δ表示实际的气动舵面的舵偏角,为由气动舵面引起的偏航力矩系数矩阵,为由气动舵面引起的俯仰力矩系数矩阵;f
ω
=[f1,f2,f3]
t
为姿态环的系数矩阵,f
ω
=[f4,f5,f6]
t
为角速率环的系数矩阵,g
ω
表示姿态环的控制矩阵,g
ω
表示角速率环的控制矩阵;表示姿态环的集总干扰,表示角速率环的集总干扰,包括气动参数不确定性、外界干扰和控制分配误差;可具体表示为:
[0016][0017]
δ
f
表示气动力系数的摄动范围(%,以百分比表征),d
α
,d
β
和表示外界干扰;
[0018][0019]
δ
m
表示力矩系数的摄动范围(%,以百分比表征);为由侧滑角引起的滚转力矩系数,为由滚转角速率引起的滚转力矩系数,为由偏航角速率引起的滚转力矩系数,为由侧滑角引起的偏航力矩系数,为由滚转角速率引起的偏航力矩系数,为由偏航角速率引起的偏航力矩系数,表示外界干扰;表示控制分配误差;c表示平均气动弦长,m
z,α
为由攻角引起的俯仰力矩系数,为由俯仰角速率引起的俯仰力矩系数。
[0020]
步骤三、结合飞行器实际执行机构中存在的故障,对气动舵面的舵偏角进行改写,并得到改写后将执行机构故障包含在集总干扰内的角速率环;
[0021]
具体为:
[0022]
δ
c
表示期望的舵偏角,λ=diag{λ1,λ2,λ3,λ4,λ5,λ6,λ7,λ8},(0<λ
i
≤1,i=1,
…
,8)表示执行机构的有效性损失,表示执行机构的偏置故障,均为时变函数。
[0023]
改写后的角速率环表示为:
[0024][0025]
其中,表示包含执行机构故障在内的集总干扰;
[0026]
步骤四、利用步骤二建立的姿态环的仿射非线性方程和步骤三改写的执行机构故障包含在集总干扰内的角速率环,构建具有通用形式的基于观测器补偿的传统容错控制器。
[0027]
具体步骤为:
[0028]
首先、设计传统容错控制器的控制律:
[0029][0030]
其中,m
c
为由传统容错控制器求得的期望气动力矩;k
ω
=k1·
i3表示姿态环的控制增益;k
ω
=k2·
i3表示角速率环的控制增益;表示对角单位矩阵;k1为待设计的姿态环的控制器参数;k2为待设计的角速率环的控制器参数;e
ω
=ω
‑
ω
c
表示姿态环的跟踪误差;ω
c
=[α
c
,β
c
,γ
sc
]
t
表示飞行器期望的姿态角指令,由制导算法根据飞行器要执行的任务和当前位置给出;e
ω
=ω
‑
ω
c
表示角速率环的跟踪误差;表示姿态环期望信号的微分信号;表示角速率环期望信号的微分信号;表示对姿态环集总干扰的估计值;表示对角速率环集总干扰的估计值。
[0031]
然后、采用二次规划法完成控制律中期望气动力矩m
c
到飞行器执行机构δ
c
的分配,并利用开源工具箱进行求解,得到具有通用形式的基于观测器补偿的传统容错控制器。
[0032]
控制分配问题可建模如下:
[0033][0034]
其中,w1和w2为不同的权值矩阵,σ为权重因子,为δ
c
的微分信号,δ
max
为控制面偏角的上界,δ
min
为控制面偏角的下界,为控制面偏转角速率上界。
[0035]
步骤五、以长短时记忆网络为基础结构,利用传统容错控制器进行大量飞行仿真,并将仿真数据作为训练样本对深度学习故障诊断单元进行训练,获取最终深度学习故障诊断单元的网络参数。
[0036]
所述深度学习故障诊断单元由3层lstm层和1层全连接层拼接而成,输入为:输出为:
[0037]
其中为所识别的执行机构的故障信息。
[0038]
对深度学习故障诊断单元进行训练的具体步骤如下:
[0039]
首先、利用传统容错控制器在飞行包线内进行大量飞行仿真,在可控范围内随机设置执行机构的故障情况,使用传统容错控制器控制飞行器跟踪期望的姿态环指令ω
c
,采集飞行过程中产生的期望控制力矩m
c
、对角速率环集总扰动的估计值和执行机构故障设置的情况λ和作为训练样本。
[0040]
然后、将深度学习故障诊断单元网络训练的损失函数设置为均方误差形式,使用adam优化器根据损失值计算梯度来更新故障诊断单元的网络参数;
[0041]
经过充分的训练迭代,最终得到可识别执行机构故障参数的故障诊断单元网络,并通过未经训练的样本进行测试。
[0042]
步骤六、构建飞行器分层容错控制框架,采用训练好的深度学习故障诊断单元进行实时故障诊断,采用修正的固定时间扩张状态观测器和容错控制律进行期望力矩的求取,采用鲁棒最小二乘控制分配方法利用深度学习故障诊断单元识别的故障信息,实现期望力矩到各执行机构的容错控制分配。
[0043]
所述的分层容错控制框架由深度学习故障诊断单元,修正的固定时间扩张状态观测器,修正的容错控制律和鲁棒最小二乘控制分配四部分构成。
[0044]
1)深度学习故障诊断单元用于在多源复合干扰作用下实时识别故障参数
[0045]
2)对于可能存在的故障参数的识别误差,在角速率环以控制分配误差的形式使用修正的固定时间扩张状态观测器进行补偿,结合修正的容错控制律,实现在控制层的容错。
[0046]
具体为:
[0047]
首先、修正的容错控制律设计为:
[0048][0049]
其中,并未包含执行机构故障;由修正的固定时间扩张状态观测器提供,具体为:
[0050][0051]
α
ω
、α
ω
>0分别为待设计的姿态角环和角速率环参数,k
ω1
=1.5l
ω1/2
,k
ω2
=1.1l
ω
,l
ω
为姿态角环集总干扰微分值的上界,k
ω1
=1.5l
ω1/2
,k
ω2
=1.1l
ω
,l
ω
为角速率环集总干扰微分值的上界;μ
ω1
,μ
ω2
,μ
ω1
,μ
ω2
为待设计的参数,使得矩阵p
ω
=[
‑
μ
ω1
,1;
‑
μ
ω2
,0]和p
ω
=[
‑
μ
ω1
,1;
‑
μ
ω2
,0]均为hurwitz矩阵。
[0052]
3)鲁棒最小二乘控制分配根据深度学习故障诊断单元所识别的故障参数同时考虑可能存在的故障参数的识别误差,进行容错控制分配,实现在控制分配层的容错;
[0053]
具体为:
[0054]
首先,改写执行机构故障模型式为:
[0055]
[0056]
其中,表示执行机构的有效性损失和偏置故障的诊断误差;
[0057]
假设ε1,ε2为正数,进一步得到ε3,ε4为正数。
[0058]
然后,将控制分配问题改写为如下的优化问题:
[0059][0060]
最后,通过最小化控制分配的最差残差集r来得到最优解;
[0061]
最差残差集r为:
[0062][0063]
假设控制分配的最差残差集r满足如下的约束条件:
[0064][0065]
因此,将鲁棒最小二乘控制分配的优化问题进一步转化为如下的二阶锥规划问题:
[0066][0067]
其中,κ
l
表示最差残差集r的上界,可通过寻求κ
l
的最小值来获取满足约束条件的最优控制量δ。
[0068]
通过开源工具箱进行优化求解κ
l
,μ,可得到鲁棒最小二乘控制分配的结果,实现在考虑执行机构故障的基础上,将期望气动力矩容错分配至各执行机构。
[0069]
至此,深度学习故障诊断单元、鲁棒最小二乘控制分配、结合修正的控制律和观测器,统一构成了基于深度学习故障诊断单元的飞行器分层容错控制框架。
[0070]
本发明的优点在于:
[0071]
(1)一种基于深度学习故障诊断的飞行器分层容错控制方法,通过引入基于深度学习的故障诊断单元,突破了传统方法无法有效的从多源复合干扰中提取执行机构的故障信息的瓶颈。
[0072]
(2)一种基于深度学习故障诊断的飞行器分层容错控制方法,进一步提升了基于观测器补偿的传统容错控制方法的控制性能以及容错性能。
[0073]
(3)一种基于深度学习故障诊断的飞行器分层容错控制方法,依托于基于观测器补偿的传统容错控制方法,但不受具体控制方法和观测器方法限制,具有易实现和拓展性。
附图说明
[0074]
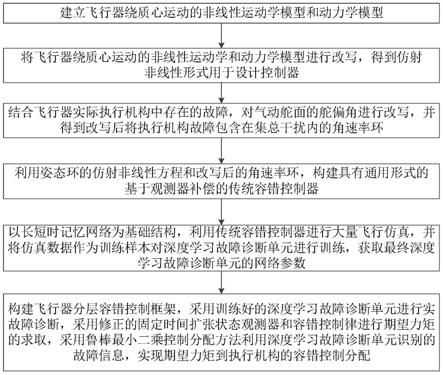
图1为本发明一种基于深度学习故障诊断的飞行器分层容错控制方法的流程图;
[0075]
图2为本发明一种基于深度学习故障诊断的飞行器分层容错控制方法的控制架构图;
[0076]
图3为本发明所述深度学习故障诊断单元的网络结构图;
[0077]
图4为本发明所述深度学习故障诊断单元的训练结构图;
[0078]
图5为本发明所述深度学习故障诊断单元对有效性损失故障的诊断效果图;
[0079]
图6为本发明所述深度学习故障诊断单元对偏置故障的诊断效果图;
[0080]
图7为本发明所述分层容错控制方法与基于观测器补偿的传统容错控制方法的控制效果对比图。
[0081]
图8为本发明所述分层容错控制方法与基于观测器补偿的传统容错控制方法的执行机构偏转角对比图。
具体实施方式
[0082]
为了便于本领域普通技术人员理解和实施本发明,下面结合附图和实施例对本发明作进一步的详细描述。
[0083]
本发明公开了一种基于深度学习故障诊断的飞行器分层容错控制方法,基于观测器补偿的传统容错控制方法的基础上,结合新一代人工智能的最新研究成果,通过引入基于深度学习方法的故障诊断单元,突破现有容错控制方法无法有效从多源复合干扰中提取执行机构的故障信息的瓶颈,同时弥补由此导致的容错控制方法期望控制力矩无法产生、容错性能较差等缺点,以进一步提高控制器在执行机构故障情况下的容错性能和控制性能,对实现飞行器姿态系统的容错稳定控制具有重要的意义。
[0084]
本发明首先建立非线性运动学和动力学模型,运动学模型三个方程称为姿态角环,动力学模型三个方程称为角速率环,姿态角环的控制量是角速率,角速率环的控制量是执行机构的舵偏角,将两个模型改成仿射非线性形式用于设计控制器;控制器包含姿态环的控制律:根据期望的姿态角产生期望的角速率指令;以及角速率环的控制律:根据产生的期望角速率指令计算所需的气动力矩。
[0085]
然后飞行器实际飞行中,执行机构即气动舵面可能存在故障,根据故障的建模形式对角速率环进行改写,将故障部分与模型不确定性和外界干扰一同视作集总干扰,用于传统容错控制器设计;接着根据所求的气动力矩,使用二次规划进行控制分配,分配到八个执行机构上,得到每个执行机构的舵偏角,即传统容错控制律的思路。
[0086]
最后为本发明的核心部分:基于深度故障诊断的容错控制框架,通过传统容错控制方法在飞行包线内以及在在可控范围内随机设置执行机构的故障情况,进行大量飞行仿真,产生样本数据并通过深度学习方法进行训练,得到训练好的故障诊断单元,用于识别故障的两个参数;接着对控制律和观测器进行修正,得到期望的气动力矩,最后最小二乘控制分配方法结合诊断到的故障信息,将期望的气动力矩分配至考虑了故障后的执行机构。
[0087]
所述的基于深度学习故障诊断的飞行器分层容错控制方法,如图1所示,具体步骤如下:
[0088]
步骤一、建立飞行器绕质心运动的非线性运动学模型和动力学模型;
[0089]
以“抓问题主要矛盾、忽略次要因素”为原则,对高超声速飞行器作如下假设:(1)飞行器为理想刚体;(2)飞行器仅依靠气动舵提供操纵力矩实现无动力飞行;(3)不考虑地球自转对建模的影响。
[0090]
在假设飞行器为理想刚体、仅依靠气动舵提供操纵力矩实现无动力飞行、不考虑地球自转对建模的影响的基础上,建立飞行器绕质心运动的非线性运动学方程组如下:
[0091][0092]
动力学模型如下:
[0093][0094]
式中,α表示飞行器的攻角,β表示飞行器的侧滑角,γ
s
表示飞行器的倾侧角;w
x
表示飞行器的滚转速率,w
y
表示飞行器的侧滑速率,w
z
表示飞行器的俯仰角速率;m表示飞行器质量;v表示飞行器速度;θ表示飞行器的弹道倾角;l表示飞行所受升力,l=qsc
l
,其中,q=ρv2/2表示动压,s为飞行器参考面积,c
l
表示升力系数;z表示飞行所受侧力,z=qsc
z
,c
z
表示侧力系数;i
xx
表示绕x轴的转动惯量,i
yy
表示绕y轴的转动惯量,i
zz
表示绕z轴的转动惯量,i
xy
表示x与y轴的惯量积;m
x
表示飞行器所受滚转力矩,m
x
=qsbm
x
,b表示飞行器翼展,表示滚转力矩系数,为由侧滑角引起的滚转力矩系数,为由控制面引起的滚转力矩系数矩阵,飞行器共具有8个气动舵面,舵偏角集合为δ=[δ1,δ2,δ3,δ4,δ5,δ6,δ7,δ8]
t
,δ1表示右内侧升降舵的舵偏角、δ2表示右外侧升降舵的舵偏角、δ3表示左内侧升降舵的舵偏角、δ4表示左外侧升降舵的舵偏角、δ5表示右副翼的舵偏角、δ6表示左副翼的舵偏角、δ7表示右方向舵的舵偏角、δ8表示左方向舵的舵偏角;为由滚转角速率引起的滚转力矩系数,为由偏航角速率引起的滚转力矩系数;m
y
表示飞行器所受偏航力矩,m
y
=qsbm
y
,表示偏航力矩系数,为由侧滑角引起的偏航力矩系数,为由控制面引起的偏航力矩系数矩阵,为由滚转角速率引起的偏航力矩系数,为由偏航角速率引起的偏航力矩系数;m
z
表示飞行器所受俯仰力矩,m
z
=qscm
z
,表示俯仰力矩系数,m
z,α
为由攻角引
起的俯仰力矩系数,为由控制面引起的俯仰力矩系数矩阵,为由俯仰角速率引起的俯仰力矩系数,c表示平均气动弦长;g表示飞行器所在位置的重力加速度。
[0095]
此外,由于地面风洞试验的技术条件限制,难以准确模拟高马赫数的飞行环境,这就导致气动参数可能存在不确定性:
[0096][0097]
其中,i=l,z;j=x,y,z;表示气动力系数的标称值,表示力矩系数的标称值,δ
f
表示气动力系数的摄动范围(%,,以百分比表征),δ
m
表示力矩系数的摄动范围(%,以百分比表征)。
[0098]
步骤二、在充分考虑模型参数不确定性和外界干扰的基础上,定义状态ω=[α,β,γ
s
]
t
和ω=[w
x
,w
y
,w
z
]
t
,将飞行器绕质心运动的非线性运动学和动力学方程组改写为用于控制器设计的仿射非线性形式:
[0099][0100]
其中,表示由气动舵面操纵产生的气动力矩项;表示与气动舵面相关的气动力矩系数矩阵;f
ω
=[f1,f2,f3]
t
为姿态环的系数矩阵,f
ω
=[f4,f5,f6]
t
为角速率环的系数矩阵,g
ω
表示姿态环的控制矩阵,g
ω
表示角速率环的控制矩阵,可具体表示为:
[0101]
[0102][0103][0104]
表示姿态环的集总干扰,表示角速率环的集总干扰,包括气动参数不确定性、外界干扰和控制分配误差,可具体表示为:
[0105][0106][0107]
其中,d
α
,d
β
,表示外界干扰,表示控制分配误差。
[0108]
步骤三、考虑到飞行器实际飞行过程中可能存在的部件老化、舵面烧蚀等问题,不失一般性,对气动舵面的舵偏角进行改写,并得到改写后将执行机构故障包含在集总干扰在内的集总干扰的角速率环;
[0109]
对气动舵面的舵偏角进行改写表示为:
[0110][0111]
其中,δ表示实际的舵偏角,δ
c
表示期望的舵偏角,
[0112]
λ=diag{λ1,λ2,λ3,λ4,λ5,λ6,λ7,λ8},(0<λ
i
≤1,i=1,
…
,8)表示执行机构的有效性损失,表示执行机构的偏置故障,均为时变函数。
[0113]
利用改写的气动舵面的舵偏角,对飞行器姿态系统进行改写,角速率环可进一步表示为:
[0114][0115]
其中,表示执行机构故障在内的集总干扰。
[0116]
步骤四、利用步骤二建立的姿态环的仿射非线性方程和步骤三改写的执行机构故障包含在集总干扰内的角速率环,构建具有通用形式的基于观测器补偿的传统容错控制器。
[0117]
首先,飞行器姿态系统可改写为用于基于观测器补偿的传统容错控制器设计的形式:
[0118][0119]
m
c
为由传统容错控制器求得的期望气动力矩;
[0120]
基于观测器补偿的传统容错控制律可设计为:
[0121][0122]
其中,k
ω
=k1·
i3表示姿态环的控制增益;k
ω
=k2·
i3表示角速率环的控制增益;表示对角单位矩阵;k1为待设计的姿态环的控制器参数;k2为待设计的角速率环的控制器参数;e
ω
=ω
‑
ω
c
表示姿态环的跟踪误差;ω
c
=[α
c
,β
c
,γ
sc
]
t
表示飞行器期望的姿态角指令,由制导算法根据飞行器要执行的任务和当前位置给出;e
ω
=ω
‑
ω
c
表示角速率环的跟踪误差;表示姿态环期望信号的微分信号;表示角速率环期望信号的微分信号,由跟踪微分器或一阶滤波器得到;表示对姿态环集总干扰的估计值;表示对角速率环集总干扰的估计值,可由如下的具有固定时间收敛特性的固定时间扩张状态观测器(feso)观测得到:
[0123][0124]
其中,α
ω
、α
ω
>0分别为待设计的姿态角环和角速率环参数,k
ω1
=1.5l
ω1/2
,k
ω2
=1.1l
ω
,l
ω
为姿态角环集总干扰微分值的上界,k
ω1
=1.5l
ω1/2
,k
ω2
=1.1l
ω
,l
ω
为角速率环集总干扰微分值的上界;μ
ω1
,μ
ω2
,μ
ω1
,μ
ω2
为待设计的参数,使得矩阵p
ω
=[
‑
μ
ω1
,1;
‑
μ
ω2
,0]和p
ω
=[
‑
μ
ω1
,1;
‑
μ
ω2
,0]均为hurwitz矩阵;t
u
为一任意正数。
[0125]
最后,采用二次规划法完成控制律中期望气动力矩m
c
分配到实际的执行机构δ
c
(气动舵面)上,为使控制分配后各舵面产生的控制力矩和期望的控制力矩差值最小,同时减少控制面的偏转,可定义如下的控制分配问题:
[0126][0127]
其中,w1和w2均为不同的权值矩阵,w1越大,式子的第一项越小,w2越大,式子的第二项越小;σ为权重因子,由于实际力矩和期望力矩差异最小是首要目标,所以σ可以取得比较大。δ
max
为控制面偏角的上界,δ
min
为控制面偏角的下界,为控制面偏转角速率上界,上下界由下式给出:
[0128][0129]
式(10)描述的二次规划问题,利用sedumi等开源工具箱很容易求解。至此,得到具有通用形式的基于观测器补偿的传统容错控制器。
[0130]
步骤五、以长短时记忆(lstm)网络为基础结构,利用步骤四所构建的基于观测器补偿的传统容错控制方法进行大量飞行仿真,并将仿真数据作为样本对深度学习故障诊断单元进行训练,获取最终深度学习故障诊断单元的网络参数。
[0131]
所述整个深度学习故障诊断单元如图3所示,由3层lstm层和1层全连接层拼接而成,输入选择为可分别由修正的容错控制律和修正的固定时间扩张状态观测器式提供,输出选择为其中为所识别的执行机构的故障信息。
[0132]
如图4所示,利用基于观测器补偿的传统容错控制器对深度学习故障诊断单元进
行训练的具体步骤如下:
[0133]
首先、深度学习故障诊断单元样本的生成,具体为:
[0134]
利用步骤四中设计的基于观测器补偿的传统容错控制器在飞行包线内进行大量飞行仿真,在可控范围内随机设置执行机构的故障情况,使用基于观测器补偿的传统容错控制器控制飞行器跟踪期望的姿态环指令ω
c
,采集飞行过程中由式(8)产生的期望控制力矩m
c
、式(9)给出的对角速率环集总扰动的估计值和执行机构故障设置的情况λ和作为训练样本。
[0135]
然后、使用样本训练深度学习故障诊断单元,具体为:
[0136]
将深度学习故障诊断单元网络训练的损失函数设置为均方误差形式,使用adam优化器根据损失值计算梯度来更新故障诊断单元的网络参数。
[0137]
经过充分的训练迭代,最终能得到一个可识别执行机构故障参数的故障诊断单元网络,并通过未经训练的样本进行测试。
[0138]
步骤六、构建飞行器分层容错控制框架,采用训练好的深度学习故障诊断单元进行实时故障诊断,采用修正的固定时间扩张状态观测器和容错控制律进行期望力矩的求取,采用鲁棒最小二乘控制分配方法利用深度学习故障诊断单元识别的故障信息,实现期望力矩到各执行机构的容错控制分配。
[0139]
在基于观测器补偿的传统容错控制器的基础上,结合新一代人工智能的最新研究成果,构成所述的基于深度学习故障诊断单元的飞行器分层容错控制方法的控制框架。
[0140]
所述的分层容错控制框架由深度学习故障诊断单元,修正的固定时间扩张状态观测器(feso),修正的容错控制律和鲁棒最小二乘控制分配四部分构成;
[0141]
如图2所示,深度学习故障诊断单元用于在多源复合干扰作用下识别故障参数鲁棒最小二乘控制分配根据所识别的故障参数同时考虑可能存在的故障参数的识别误差,进行容错控制分配,实现在控制分配层的容错;
[0142]
对于可能存在的故障参数的识别误差,在角速率环以控制分配误差的形式使用修正的固定时间扩张状态观测器进行补偿,结合修正的容错控制律,实现在控制层的容错。
[0143]
修正的容错控制律设计具体为:
[0144][0145]
其中,并未包含执行机构故障;由下述的修正的固定时间扩张状态观测器提供,具体为:
[0146][0147]
其中,各项符号表示的意义基本与式(9)一致,需要注意的是式(9)中将执行机构故障纳入集总干扰由固定时间扩张状态观测器一同估计与补偿,而本发明所述方法提出的深度学习故障诊断单元可以实现多源复合干扰下故障信息的提取识别,并不需要将执行机构故障纳入集总干扰,所以做出了部分修正:
[0148]
式中,和为所识别的执行机构故障信息,由深度学习故障诊断单元提供。
[0149]
3)、鲁棒最小二乘控制分配根据所识别的故障参数同时考虑可能存在的故障参数的识别误差,进行容错控制分配,实现在控制分配层的容错;
[0150]
具体为:
[0151]
考虑到深度学习故障诊断单元所识别的故障信息存在非精确性,将执行机构故障模型式(5)进一步表示为:
[0152][0153]
其中,表示深度学习故障诊断单元的诊断误差,假设其中,ε1,ε2为正数,可以进一步得到其中,ε3,ε4为正数。
[0154]
控制分配问题可以改写为如下的优化问题:
[0155][0156]
鲁棒最小二乘控制分配方法通过最小化控制分配的最差残差集r来得到优化问题最优解,最差残差集r可描述为:
[0157]
[0158]
可以定义:
[0159][0160]
其中,υ
n
定义为:
[0161][0162]
其中,为满足条件的任一向量。
[0163]
在的方向上,最差残差集r可进一步表示为:
[0164][0165]
其中,
[0166]
可假设控制分配的最差残差集r满足如下的约束条件:
[0167][0168]
其中,κ
l
表示最差残差集r的上界,可通过寻求κ
l
的最小值来获取满足约束条件的最优控制量δ。因此,鲁棒最小二乘控制分配优化问题可进一步转化为如下的二阶锥规划问题:
[0169][0170]
其中,κ
l
,μ为待优化的参数,可通过yalmip等开源工具箱进行优化求解,可得到鲁棒最小二乘控制分配的结果。
[0171]
至此,深度学习故障诊断单元、鲁棒最小二乘控制分配、结合修正的控制律和观测器,统一构成了基于深度学习故障诊断单元的飞行器分层容错控制框架。
[0172]
为检验本发明的有效性与较基于观测器补偿的传统容错控制方法的优越性,以某型具有冗余执行机构高超声速飞行器为实施例,进行仿真验证。
[0173]
所提控制方案中的参数选取情况如下:
[0174]
k1=4,k2=12,α
ω
=0.5,μ
ω1
=0.3,μ
ω2
=0.1,k
ω1
=0.4,k
ω2
=0.1,
[0175]
α
ω
=0.5,μ
ω1
=1.2,μ
ω2
=0.8,k
ω1
=1.3,k
ω2
=0.9。
[0176]
本发明所提的深度学习故障诊断单元对执行机构故障的诊断效果图如图5和6所
示,可以看出深度学习故障诊断单元对故障的诊断精度较高,诊断结果的rmse(root mean square error,均方根误差)处于0.0485范围内,验证了深度学习故障诊断单元的有效性;
[0177]
本发明所提的基于深度学习故障诊断单元的飞行器分层容错控制方法与基于观测器补偿的传统容错控制方法的控制效果对比结果如图7所示,通过对姿态角三通道的跟踪效果与跟踪误差对比,可以发现本发明所提分层容错控制方法在执行机构故障情况下体现出更佳的控制效果;
[0178]
本发明所提的基于深度学习故障诊断的飞行器分层容错控制方法与基于观测器补偿的传统容错控制方法的执行机构偏转角曲线如图8所示,可以发现传统容错控制方法引起了执行机构δ7,δ8的饱和现象,本发明所提的分层容错控制方法有效弥补了这一缺点。
[0179]
综合上述对实施例的仿真验证,证明了本发明一种基于深度学习故障诊断单元的飞行器分层容错控制方法的有效性。
[0180]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。