1.本技术涉及体育场馆领域,特别是涉及一种基于无线通信的智能羽毛球馆控制系统。
背景技术:
2.随着人们生活水平的提高,人们对身体健康越来越重视。体育锻炼已经成为人们日常生活必不可少的一部分。其中,羽毛球运动深受人们的喜爱。羽毛球比赛也越来越多。但是,现有的羽毛球场馆功能相对单一,尤其在夜晚,灯光通常对运动员的视线产生比较大的影响。
技术实现要素:
3.基于此,有必要针对上述技术问题,提供一种基于无线通信的智能羽毛球馆控制系统。
4.一种基于无线通信的智能羽毛球馆控制系统,应用于羽毛球馆,所述羽毛球馆顶部四周设置有多个朝向羽毛球场地照射的照明灯,包括:
5.图像采集模块,用于采集羽毛球的运动图像信息,并根据羽毛球的运动图像信息得到羽毛球的运动速度;
6.高度采集模块,用于采集所述羽毛球在上升时的运动高度;
7.控制模块,分别与所述图像采集模块和所述高度采集模块连接,用于根据所述运动速度和所述运动高度,实时控制所述照明灯照射的方向。
8.在一个实施例中,所述控制模块包括:
9.运算模块,所述运算模块用于根据所述运动速度和运动高度,判断所述羽毛球上升的最高高度;
10.判断控制模块,与所述运算模块连接,用于当所述最高高度高于所述预设高度时,控制所述照明灯朝向水平方向转动,当所述最高高度不高于所述预设高度时,控制所述照明灯保持原状态不变。
11.在一个实施例中,所述图像采集模块还用于采集运动员的头部位置;
12.所述运算模块还用于根据所述运动速度和运动高度,计算羽毛球达到最高高度时的位置与所述运动员的头部位置的连线与水平面的夹角,当所述夹角大于预设夹角,且所述最高高度高于所述预设高度时,所述判断控制模块控制所述照明灯朝向水平方向转动,当所述夹角不大于所述预设夹角或者所述最高高度不高于所述预设高度时,所述判断控制模块控制所述照明灯保持原状态不变。
13.在一个实施例中,所述羽毛球的高度为羽毛球被击打反弹的瞬时高度,所述羽毛球的运动速度为羽毛球被击打反弹时的瞬时速度。
14.在一个实施例中,所述运算模块预存羽毛球速度和空气阻力映射模型,所述运算模块根据羽毛球运动速度、所述羽毛球速度、空气阻力映射模型和所述羽毛球的质量,判断
所述羽毛球上升的最高高度。
15.在一个实施例中,还包括项目选择模块,与所述控制模块连接,用于获取运动员选择则的是篮球运动还是羽毛球运动,若运动员选择的是篮球运动,则所述控制模块控制羽毛球场馆的运动场地划线由羽毛球场地切换为篮球场地,运动场地划线为埋设在地板下的多个led灯形成,所述个led灯对应的地板为透明耐磨钢化玻璃制成,所述控制模块还控制所述照明灯垂直朝向运动场地照射。
16.本技术实施例提供的所述基于无线通信的智能羽毛球馆控制系统应用于羽毛球馆。所述羽毛球馆顶部四周设置有多个朝向羽毛球场地照射的照明灯。所述基于无线通信的智能羽毛球馆控制系统包括图像采集模块、高度采集模块和控制模块。所述图像采集模块用于采集羽毛球的运动图像信息,并根据羽毛球的运动图像信息得到羽毛球的运动速度。所述图像采集模块可以包括多个摄像头,多角度采集羽毛球和运动员的图像,所述摄像头可以为高速摄像头,因此可以根据不同帧中羽毛球的位置和间隔的时间判断羽毛球的速度。所述羽毛球的速度包括速率和方向。高度采集模块用于采集所述羽毛球的运动高度。所述运动高度可以为羽毛球在上升时某一个时刻的高度。所述运动高度与所述运动速度在同一时刻。所述控制模块分别与所述图像采集模块和所述高度采集模块连接。所述控制模块用于根据所述运动速度和所述运动高度,实时控制所述照明灯照射的方向。所述控制模块能够根据所述运动速度和所述运动高度,预判处羽毛球能够达到的最高高度,若羽毛球达到的最高高度会使运动员的仰视角度受到照明灯的影响,能够控制所述照明灯照明角度或者照明亮度变化,因此避免运动员出现眩晕或者无法清楚看清羽毛球的位置,能够使运动员正常发挥水平。
附图说明
17.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
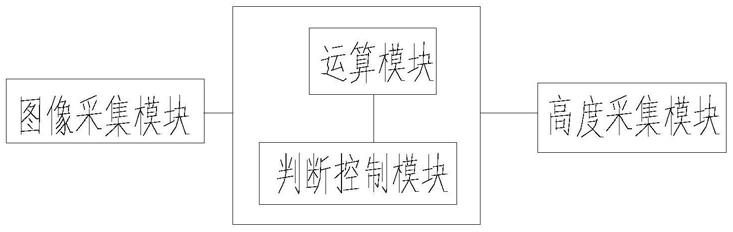
18.图1为本技术实施例提供的基于无线通信的智能羽毛球馆控制系统示意图;
19.图2为本技术另一个实施例提供的基于无线通信的智能羽毛球馆控制系统示意图;
20.图3为本技术另一个实施例提供的基于无线通信的智能羽毛球馆控制系统示意图。
具体实施方式
21.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
22.请参见图1,本技术实施例提供一种基于无线通信的智能羽毛球馆控制系统。所述基于无线通信的智能羽毛球馆控制系统应用于羽毛球馆。所述羽毛球馆顶部四周设置有多个朝向羽毛球场地照射的照明灯。所述基于无线通信的智能羽毛球馆控制系统包括图像采
集模块、高度采集模块和控制模块。所述图像采集模块用于采集羽毛球的运动图像信息,并根据羽毛球的运动图像信息得到羽毛球的运动速度。所述图像采集模块可以包括多个摄像头,多角度采集羽毛球和运动员的图像,所述摄像头可以为高速摄像头,因此可以根据不同帧中羽毛球的位置和间隔的时间判断羽毛球的速度。所述羽毛球的速度包括速率和方向。高度采集模块用于采集所述羽毛球的运动高度。所述运动高度可以为羽毛球在上升时某一个时刻的高度。所述运动高度与所述运动速度在同一时刻。所述控制模块分别与所述图像采集模块和所述高度采集模块连接。所述控制模块用于根据所述运动速度和所述运动高度,实时控制所述照明灯照射的方向。所述控制模块能够根据所述运动速度和所述运动高度,预判处羽毛球能够达到的最高高度,若羽毛球达到的最高高度会使运动员的仰视角度受到照明灯的影响,能够控制所述照明灯照明角度或者照明亮度变化,因此避免运动员出现眩晕或者无法清楚看清羽毛球的位置,能够使运动员正常发挥水平。
23.请参见图2,在一个实施例中,所述所述控制模块包括运算模块和判断控制模块。所述运算模块用于根据所述运动速度和运动高度,判断所述羽毛球上升的最高高度。
24.可以理解,根据运动学原理,当将羽毛球某一个时刻的速度作为初始速度 vo时,根据羽毛球的受力和质量的比和能够算出羽毛球的加速度a。根据速度
‑
位移公式:够算出羽毛球的位移。其中vt为羽毛球在运动一段时间后的速度。可以对vt和的vo进行正交分解,得到在竖直方向和水平方向的分速度,进而通过速度
‑
位移公式得到羽毛球在竖直方向和水平方向的位移。当vt在竖直方向的分速度为零时,能够算出羽毛球在竖直方向的最大位移。
25.进而确定羽毛球的最高高度。其中,羽毛球的受力可以包括羽毛球受到的重力和空气阻力。对重力和空气阻力矢量求和,然后除以羽毛球的质量m能够算出羽毛球的加速度a。所述判断控制模块与所述运算模块连接,用于当所述最高高度高于所述预设高度时,控制所述照明灯朝向水平方向转动,当所述最高高度不高于所述预设高度时,控制所述照明灯保持原状态不变。所述预设高度可以为根据运动员多次训练和比赛得到的经验值。当所述最高高度高于所述预设高度时,说明此时运动员仰视的高度和角度会受到照明灯的影响。此时所述控制装置预先控制照明灯由朝向斜下方照射开始向水平方向转动,避免光线直射运动员的眼睛。所述控制照明灯转动的角度可以根据经验值设置。当所述最高高度不高于所述预设高度时,控制所述照明灯保持原状态不变。
26.在一个实施例中,所述图像采集模块还用于采集运动员的头部位置。所述运算模块还用于根据所述运动速度和运动高度,计算羽毛球达到最高高度时的位置与所述运动员的头部位置的连线与水平面的夹角。一般而言,所述运动员头部的位置可以反映所述运动员眼睛的位置,当所述夹角大于预设夹角时,例如大于60
°
时,且所述最高高度高于所述预设高度时,说明此时照明灯大概率会影响运动员的视线,因此所述判断控制模块控制所述照明灯朝向水平方向转动。当所述夹角不大于所述预设夹角或者所述最高高度不高于所述预设高度时,也就是说,即使最高高度达到预设高度,但是由于夹角较小,说明羽毛球飞的虽然高但是距离远,因此运动员的视线并不不会受到照明灯的影响,且在这种情况下,羽毛球很可能会飞出界外,因此所述判断控制模块控制所述照明灯保持原状态不变。
27.在一个实施例中,所述羽毛球的高度为羽毛球被击打反弹的瞬时高度,所述羽毛
球的运动速度为羽毛球被击打反弹时的瞬时速度。
28.在一个实施例中,所述运算模块预存羽毛球速度和空气阻力映射模型。羽毛球速度和空气阻力映射模型能够反映羽毛球在不同速度时对应到空气阻力。该值可以根据经验值或者计算获得。其中,羽毛球受到的空气阻力f与羽毛球的速度v的平方呈正比。f=kv
2.
。空气阻力系数k可以通过经验值或者数学拟合获得。因此通过羽毛球的速度能够得到羽毛球受到的空气阻力。在一个实施例中,可以采用羽毛球的平均速度获得羽毛球的空气阻力,以减少运算量。所述运算模块根据羽毛球运动速度、所述羽毛球速度和空气阻力映射模型和所述羽毛球的质量,判断所述羽毛球上升的最高高度。也就是说,此时羽毛球在竖直方向的受力为重力和空气阻力在数值方向的分量。以及羽毛球在竖直方向的初始速度的分量,能够计算出羽毛球能够达到的最高点。同理,根据上述物理量在水平方向的分量,能够计算出羽毛球在水平方向的位移。
29.在一个实施例中,羽毛球馆可以为多功能场馆。也就是说羽毛球场馆可以在篮球场地和羽毛球场地之间根据需要切换。切换方式可以为场地划线的切换。
30.请参见图3,所述基于无线通信的智能羽毛球馆控制系统还包括括项目选择模块,与所述控制模块连接。所述项目选择模块用于获取运动员选择则的是篮球运动还是羽毛球运动。若运动员选择的是篮球运动,则所述控制模块控制羽毛球场馆的运动场地划线由羽毛球场地切换为篮球场地,运动场地划线为埋设在地板下的多个led灯形成,所述个led灯对应的地板为透明耐磨钢化玻璃制成,因此led灯点亮后能够形成运动场地的划线。当切换为篮球场地时,篮球场地划线对应的led灯点亮。当切换为羽毛球场地时,羽毛球场地对应的led 灯点亮。当切换为篮球场地时,由于篮球运动中篮球的高度和角度几乎不受到设置在场馆顶部的照明灯的影响,因此所述控制模块控制所述照明灯保持垂直朝向运动场地照射,能够提供最佳的照明效果。
31.本领域普通技术人员可以理解实现上述实施例中的控制等方式,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(read
‑
only memory,rom)、磁带、软盘、闪存或光存储器等。易失性存储器可包括随机存取存储器(random accessmemory,ram)或外部高速缓冲存储器。作为说明而非局限,ram可以是多种形式,比如静态随机存取存储器(static random access memory,sram)或动态随机存取存储器(dynamic random access memory,dram)等。
32.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
33.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。