1.本发明涉及竖井挖掘技术领域,进一步的,涉及一种竖井挖掘装置及其施工方法,尤其涉及一种适用于大断面竖井挖掘装置及其施工方法。
背景技术:
2.随着城市空间的不断开发,城市地下工程建设如地下停车场、盾构始发井、地下桩基等超大直径竖井(直径大于20m的竖井)工程需求日益旺盛,并且随着开挖深度的不断增加,一般会遇到含水地层。
3.传统施工方法一般通过采用灌注桩、连续墙施工并配合降水施工的方法,进行土体稳定、支护,从而保证施工的安全性;之后根据地层软硬程度,采用挖掘机或者钻爆法进行挖掘施工,但该种方法工序繁多、工程结构复杂、安全性较低。对于城市施工项目(如:地下停车场等),一般对场地、工期、噪音等都有严格控制,传统作业方法受到限制,并且当前的常规竖井钻井装备只适应于小直径竖井开挖,不适用于大断面竖井的开挖。
4.针对相关技术中大断面竖井施工工序复杂、安全性低、适用性差的问题,目前尚未给出有效的解决方案。
5.由此,本发明人凭借多年从事相关行业的经验与实践,提出一种竖井挖掘装置及其施工方法,以克服现有技术的缺陷。
技术实现要素:
6.本发明的目的在于提供一种竖井挖掘装置及其施工方法,无需提前对竖井进行治水处理,通过可移动的水下掘进车在竖井内进行水下土体、岩石的开挖作业,整个过程无需人工下井,人员需求少,施工高效、安全,实现高度自动化、安全化施工。
7.本发明的目的可采用下列技术方案来实现:
8.本发明提供了一种竖井挖掘装置,所述竖井挖掘装置包括能在水下进行掘进作业的水下掘进车,其中:
9.所述水下掘进车包括车体、带动所述车体在竖井内移动的行走机构、对岩体进行开挖的掘进机构以及对开挖产生的岩渣进行收集并外排的收渣机构,所述行走机构设置于所述车体的底部,所述掘进机构和所述收渣机构均能上下摆动地设置于所述车体的前部,且所述掘进机构位于所述收渣机构的前方,所述收渣机构与出浆管路的一端连接,所述出浆管路的另一端延伸至地面以上。
10.在本发明的一较佳实施方式中,所述掘进机构包括开挖刀、开挖臂和摆动油缸,所述开挖臂的一端与所述车体铰接,所述开挖刀能转动地连接于所述开挖臂的另一端,所述摆动油缸位于所述开挖臂的下方,所述摆动油缸的缸体部分与所述车体铰接,所述摆动油缸的活塞杆部分与所述开挖臂铰接。
11.在本发明的一较佳实施方式中,所述开挖刀为圆筒状结构,所述开挖刀的外壁上设置有对岩体进行切削的多个截齿,所述开挖刀的轴心位置设置有转轴,所述开挖刀通过
所述转轴与所述开挖臂能转动地连接,所述开挖刀内设置于驱动所述开挖刀旋转的驱动装置,所述驱动装置的输出轴与所述转轴连接。
12.在本发明的一较佳实施方式中,所述驱动装置为液压马达或者电机。
13.在本发明的一较佳实施方式中,所述收渣机构包括集渣铲斗和调整油缸,所述集渣铲斗的前部开设有供岩渣进入的开口,所述集渣铲斗的后部与所述车体铰接,所述调整油缸位于所述集渣铲斗的上方,且所述调整油缸的缸体部分与所述车体铰接,所述调整油缸的活塞杆部分与所述集渣铲斗的顶部铰接。
14.在本发明的一较佳实施方式中,所述收渣机构还包括吸浆管和泥浆泵,所述吸浆管的一端伸入至所述集渣铲斗的内部,所述吸浆管的另一端与所述泥浆泵的入口连接,所述泥浆泵的出口与所述出浆管路连接。
15.在本发明的一较佳实施方式中,所述收渣机构还包括泵站,所述泵站与所述泥浆泵连接。
16.在本发明的一较佳实施方式中,所述集渣铲斗的开口与所述集渣铲斗的内部之间设置于格栅板,所述格栅板上开设有多个过滤孔。
17.在本发明的一较佳实施方式中,所述行走机构为两组,两组所述行走机构分别设置于所述车体的两侧;
18.每组所述行走机构包括行走履带、主动轮、从动轮和驱动电机,所述行走履带连接于所述主动轮与所述从动轮之间,所述主动轮与所述驱动电机的输出轴连接。
19.在本发明的一较佳实施方式中,所述竖井挖掘装置还包括控制器,所述控制器设置于地面上的主控室内,所述控制器的控制信号输出端分别与所述行走机构的控制端、所述掘进机构的控制端以及所述收渣机构的控制端连接。
20.在本发明的一较佳实施方式中,所述车体上设置有位置传感器和姿态传感器,所述位置传感器的检测信号输出端和所述姿态传感器的检测信号输出端分别与所述控制器的检测信号接收端连接。
21.在本发明的一较佳实施方式中,所述出浆管路与位于地面上的泥水分离站的入口连接,所述泥水分离站的出口与渣场连接。
22.在本发明的一较佳实施方式中,所述竖井挖掘装置还包括线缆支架,所述线缆支架设置于地面上且靠近井口的位置,所述车体的顶部设置有多个起吊耳座,各所述起吊耳座上分别与起吊线缆的一端连接,所述起吊线缆的另一端与所述线缆支架连接。
23.本发明提供了一种竖井挖掘施工方法,所述竖井挖掘施工方法包括如下步骤:
24.步骤s1:开挖初始井筒,并通过在所述初始井筒的内壁上安装沉井管片进行加固;
25.步骤s2:将水下掘进车下放至所述初始井筒内,并通过行走机构使所述水下掘进车移动至预设的开挖位置;
26.步骤s3:控制掘进机构对岩体进行切削;
27.步骤s4:通过所述行走机构使所述水下掘进车向前移动,掉落的岩渣被收渣机构收集;
28.步骤s5:通过出浆管路将所述收渣机构内的泥浆排出至地面;
29.步骤s6:循环步骤s3至步骤s5,直至向下挖掘至预设深度。
30.在本发明的一较佳实施方式中,所述步骤s2中,所述初始井筒内留存有积水,以保
证所述收渣机构中的泥浆泵正常工作。
31.在本发明的一较佳实施方式中,所述步骤s3包括:
32.步骤s301:控制所述掘进机构中的开挖刀旋转;
33.步骤s302:控制所述掘进机构中的摆动油缸的活塞杆部分收缩,以使所述掘进机构中的开挖臂带动所述开挖刀向下移动;
34.步骤s303:所述开挖刀切入岩体预设深度,以对所述岩体进行破碎。
35.在本发明的一较佳实施方式中,所述步骤s4中,旋转状态下的所述开挖刀将掉落的所述岩渣推送至其后方,以被所述收渣机构中的集渣铲斗收集。
36.在本发明的一较佳实施方式中,所述步骤s5包括:
37.步骤s501:通过所述收渣机构中的格栅板过滤,小粒径岩渣以及泥浆进入至所述集渣铲斗内;
38.步骤s502:通过所述收渣机构中的泥浆泵将小粒径岩渣以及泥浆吸入至所述收渣机构中的吸浆管内;
39.步骤s503:通过所述出浆管路将小粒径岩渣以及泥浆运送至地面的泥水分离站;
40.步骤s504:所述泥水分离站将分离出的泥浆返回至井内循环利用;分离出的渣土排放至渣场。
41.在本发明的一较佳实施方式中,所述步骤s6中,开挖至预设深度后,通过管片提拉装置向井内下放所述沉井管片,并在井口位置对下一环所述沉井管片进行拼装。
42.在本发明的一较佳实施方式中,所述步骤s1至所述步骤s6中,通过起吊装置回收连接于所述水下掘进车上的起吊线缆,将所述水下掘进车提升至地面。
43.由上所述,本发明的竖井挖掘装置及其施工方法的特点及优点是:在对竖井进行掘进过程中无需人工下井,将水下掘进车下放至井内,通过远程控制行走机构,即可带动车体自由移动至预设的初始位置,并由初始位置开始通过掘进机构对岩体进行开挖作业,水下掘进车移动灵活,可适应不同断面形状和尺寸的竖井开挖,适用范围广,尤其适于大断面竖井的挖掘;另外,在对岩体进行掘进的同时,可通过收渣机构将开挖产生的岩渣进行收集并外至地面,有效解决岩渣处理难的问题,集开挖、收渣、排渣于一体,适应有水施工环境,整个过程无需人工下井,人员需求少,施工高效、安全,实现高度自动化、安全化施工。
附图说明
44.以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。
45.其中:
46.图1:为本发明竖井挖掘装置的结构示意图。
47.图2:为本发明竖井挖掘装置中水下掘进车的结构示意图。
48.图3:为本发明竖井挖掘装置中水下掘进车的俯视图。
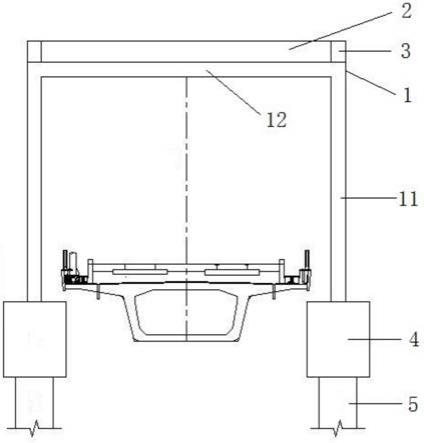
49.图4:为本发明竖井挖掘装置中水下掘进车挖掘状态示意图之一。
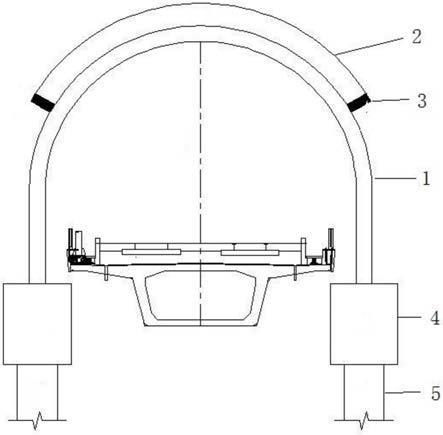
50.图5:为本发明竖井挖掘装置中水下掘进车挖掘状态示意图之二。
51.本发明中的附图标号为:
52.1、水下掘进车;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101、车体;
53.102、行走机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1021、驱动电机;
54.1022、主动轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1023、从动轮;
55.1024、行走履带;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103、掘进机构;
56.1031、开挖刀;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1032、开挖臂;
57.1033、摆动油缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104、收渣机构;
58.1041、集渣铲斗;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1042、调整油缸;
59.1043、吸浆管;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1044、泥浆泵;
60.1045、泵站;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1046、格栅板;
61.105、起吊耳座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106、起吊线缆;
62.2、出浆管路;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、沉井管片;
63.4、线缆支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、泥水分离站;
64.6、渣场;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7、管片提拉装置;
65.8、主控室。
具体实施方式
66.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
67.本发明中的上、下、前、后等方向均以附图2中的上、下、前、后为准,再次一并说明。
68.实施方式一
69.如图1至图3所示,本发明提供了一种竖井挖掘装置,该竖井挖掘装置包括能在水下进行掘进作业的水下掘进车1,其中:水下掘进车1包括车体101、行走机构102、掘进机构103以及收渣机构104,行走机构102用于带动车体101在竖井内移动,掘进机构103用于对岩体进行开挖,收渣机构104用于对开挖产生的岩渣进行收集并外排,行走机构102设置于车体101的底部,掘进机构103和收渣机构104均能上下摆动地设置于车体101的前部,且掘进机构103位于收渣机构104的前方,收渣机构104与出浆管路2的一端连接,出浆管路2的另一端延伸至地面以上。
70.本发明将水下掘进车1下放至井内,通过远程控制行走机构102,即可带动车体101在井内自由移动至预设的初始位置,并由初始位置开始通过掘进机构103对岩体进行开挖作业,水下掘进车1移动灵活,可适应不同断面形状和尺寸的竖井开挖,适用范围广;另外,由于掘进机构103位于收渣机构104的前方,在掘进机构103对岩体进行掘进的同时,可通过收渣机构104将开挖产生的岩渣进行收集并外至地面,解决岩渣处理难的问题;本发明集开挖、收渣、排渣于一体,适应有水施工环境,整个过程无需人工下井,人员需求少,施工高效、安全,实现高度自动化、安全化施工。
71.在本发明的一个可选实施例中,如图2、图3所示,掘进机构103包括开挖刀1031、开挖臂1032和摆动油缸1033,开挖臂1032和摆动油缸1033的数量均为两个,两开挖臂1032的一端分别与车体101的前部铰接,开挖刀1031能转动地连接于两开挖臂1032的另一端,两摆动油缸1033分别位于对应的开挖臂1032的下方,且两摆动油缸1033的缸体部分分别与车体101的前部铰接,两摆动油缸1033的活塞杆部分分别与对应的开挖臂1032的中部铰接。通过控制摆动油缸1033的活塞杆部分的伸缩量,对开挖臂1032的上下摆动进行控制,从而实现开挖刀1031对开挖位置的调整。
72.具体的,如图2、图3所示,开挖刀1031为圆筒状结构,以保证圆形断面的开挖精度。开挖刀1031的外壁上设置有对岩体进行切削的多个截齿,其中,各截齿可均布于开挖刀1031的外壁上,也可根据切削位置在开挖刀1031的外壁上集中布设。开挖刀1031的轴心位置设置有转轴,开挖刀1031通过转轴与开挖臂1032能转动地连接,开挖刀1031内设置于驱动开挖刀1031旋转的驱动装置,驱动装置的输出轴与转轴连接,通过驱动装置带动开挖刀1031旋转作业。
73.进一步的,驱动装置可为但不限于液压马达或者电机。
74.在本发明的一个可选实施例中,如图2、图3所示,收渣机构104包括集渣铲斗1041和调整油缸1042,调整油缸1042的数量为两个,集渣铲斗1041的前部开设有供岩渣进入的开口,开口与集渣铲斗1041的内部相贯通,集渣铲斗1041的后部通过连接耳座与车体101的前部铰接,两调整油缸1042均位于集渣铲斗1041的上方,且两调整油缸1042的缸体部分分别与车体101的前部铰接,两调整油缸1042的活塞杆部分分别与集渣铲斗1041的顶部铰接。通过控制调整油缸1042的活塞杆部分的伸缩量,对集渣铲斗1041的上下摆动进行控制,从而实现集渣铲斗1041对收渣位置的调整。
75.进一步的,如图2所示,收渣机构104还包括吸浆管1043和泥浆泵1044,泥浆泵1044安装于车体101上,吸浆管1043的一端伸入至集渣铲斗1041的内部,吸浆管1043的另一端与泥浆泵1044的入口连接,泥浆泵1044的出口与出浆管路2连接。通过控制泥浆泵1044的工作状态,将集渣铲斗1041内收集的岩渣和泥浆吸入至出浆管路2中外排至地面。
76.进一步的,如图1所示,出浆管路2与位于地面上的泥水分离站5的入口连接,泥水分离站5的出水口与竖井内部连接,泥水分离站5的出渣口与渣场6连接。从而可将泥水分离站5将分离出的泥浆返回至井内循环利用,而分离出的渣土排放至渣场6。
77.进一步的,如图2所示,收渣机构104还包括泵站1045,泵站1045设置于车体101上,泵站1045与泥浆泵1044连接。通过泵站1045向泥浆泵1044提供吸力,保证泥浆泵1044正常工作。
78.在本发明的一个可选实施例中,如图2、图3所示,集渣铲斗1041的开口与集渣铲斗1041的内部之间设置于格栅板1046,格栅板1046沿竖直方向设置,以对集渣铲斗1041的开口与集渣铲斗1041的内部进行拦截,格栅板1046上开设有多个过滤孔。通过格栅板1046限制进入集渣铲斗1041内的岩渣的粒径,大粒径的岩渣被阻隔在集渣铲斗1041的外部,小粒径的岩渣以及泥浆进入至集渣铲斗1041内。其中,可根据实际情况对过滤孔的孔径进行调整,以通过调整格栅板1046上过滤孔的孔径对可收集的岩渣的粒径进行选择,粒径大于过滤孔的孔径的岩渣均可被认为是大粒的岩渣。
79.在本发明的一个可选实施例中,如图2、图3所示,行走机构102为两组,两组行走机构102分别设置于车体101的两侧;每组行走机构102包括行走履带1024、主动轮1022、从动轮1023和驱动电机1021,行走履带1024连接于主动轮1022与从动轮1023之间,主动轮1022与驱动电机1021的输出轴连接。通过控制驱动电机1021的工作状态,从而带动主动轮1022转动,进而通过主动轮1022与从动轮1023相配合带动行走履带1024运动。
80.在本发明的一个可选实施例中,如图1所示,竖井挖掘装置还包括控制器,控制器设置于地面上的主控室8内,控制器的控制信号输出端分别与行走机构102(即:驱动电机1021)的控制端、掘进机构103(即:摆动油缸1033)的控制端以及收渣机构104(即:调整油缸
1042以及泥浆泵1044)的控制端连接,进而可通过控制器分别对驱动电机1021、摆动油缸1033、调整油缸1042以及泥浆泵1044的工作状态进行远程控制。
81.进一步的,车体101上设置有位置传感器和姿态传感器,位置传感器的检测信号输出端和姿态传感器的检测信号输出端分别与控制器的检测信号接收端连接。通过位置传感器实时采集水下掘进车1的位置信息,并通过姿态传感器实时采集水下掘进车1的姿态信息,从而对水下掘进车1的位置和工作姿态进行监控。
82.在本发明的一个可选实施例中,如图1所示,竖井挖掘装置还包括线缆支架4,线缆支架4固定设置于地面上且靠近井口的位置,车体101的顶部设置有多个起吊耳座105,各起吊耳座105上分别与起吊线缆106的一端连接,各起吊线缆106的另一端均与线缆支架4连接,待水下掘进车1完成开挖作业后或者需要对水下掘进车1进行检修时,通过连接在车体101上的起吊线缆106将水下掘进车1起吊收回至地面。
83.进一步的,控制器可通过有线连接或者无线传输的方式对水下掘进车1进行远程控制。当采用有线连接方式时,控制器通过传输信号的线缆分别与驱动电机1021、摆动油缸1033、调整油缸1042、泥浆泵1044、位置传感器和姿态传感器等功能部件连接,传输信号的线缆以及对外排液的吸浆管1043等管线均可搭设于线缆支架4上。
84.在本发明中,如图4、图5所示,水下掘进车1适用但不限于圆形或者矩形断面的竖井开挖作业,也适用于其他不同尺寸和断面形状的竖井开挖,开挖刀1031的形状和尺寸可根据断面的形状进行调整,以使开挖刀1031的表面能够与开挖位置相适配,提高开挖轮廓的开挖精度。
85.本发明的竖井挖掘装置的特点及优点是:
86.一、该竖井挖掘装置结构简单、移动灵活,可适用于不同断面形状和尺寸的竖井开挖,尤其适用于大断面竖井的挖掘,为竖井开挖提供了全新的设备和手段。
87.二、该竖井挖掘装置在对岩体进行掘进的同时,可将开挖产生的岩渣进行收集并外至地面,集开挖、收渣、排渣于一体,有效解决了开挖后岩渣处理难的问题,实现井下远程开挖以及连续出渣。
88.三、该竖井挖掘装置适应有水施工环境,整个过程无需人工下井,人员需求少,施工高效、安全,实现高度自动化、安全化施工。
89.实施方式二
90.本发明提供了一种竖井挖掘施工方法,该竖井挖掘施工方法包括如下步骤:
91.步骤s1:开挖预设起始深度的初始井筒,并通过在初始井筒的内壁上安装沉井管片3进行加固;
92.具体的,沉井管片3通过门吊或者其他起吊工具进行逐块安装,相邻两沉井管片3之间通过螺栓连接,以使各沉井管片3形成一整体。
93.步骤s2:将水下掘进车1下放至初始井筒内,并通过远程控制行走机构102使水下掘进车1移动至预设的开挖位置;
94.进一步的,步骤s2中,初始井筒内需要保证有一定的积水留,以保证收渣机构104中的泥浆泵1044能够在初始井筒内正常工作。
95.步骤s3:控制掘进机构103对岩体进行切削;
96.进一步的,步骤s3包括:
97.步骤s301:远程控制掘进机构103中的开挖刀1031旋转;
98.步骤s302:远程控制掘进机构103中的摆动油缸1033的活塞杆部分缓慢收缩,以使掘进机构103中的开挖臂1032带动开挖刀1031向下移动;
99.步骤s303:开挖刀1031切入岩体预设深度,以对岩体进行破碎。
100.步骤s4:通过行走机构102使水下掘进车1向前移动,掉落的岩渣被收渣机构104收集;
101.具体的,步骤s4中,远程控制行走机构102带动开挖刀1031向前移动,开挖刀1031将位于其前方的岩体破碎并剥落,之后旋转状态下的开挖刀1031将掉落的岩渣推送至其后方,以被收渣机构104中的集渣铲斗1041收集。
102.步骤s5:远程控制收渣机构104中的泥浆泵1044工作,通过出浆管路2将收渣机构104内的泥浆排出至地面;
103.进一步的,步骤s5包括:
104.步骤s501:通过收渣机构104中的格栅板1046过滤,大粒径的岩渣被阻隔在集渣铲斗1041的外部,小粒径的岩渣以及泥浆进入至集渣铲斗1041内;
105.步骤s502:通过收渣机构104中的泥浆泵1044将小粒径岩渣以及泥浆吸入至收渣机构104中的吸浆管1043内;
106.步骤s503:通过出浆管路2将小粒径岩渣以及泥浆运送至地面的泥水分离站5;
107.步骤s504:泥水分离站5将分离出的泥浆返回至井内循环利用;分离出的渣土排放至渣场6,由运输车转运至其他场地。
108.步骤s6:循环步骤s3至步骤s5,直至向下挖掘至预设深度。
109.具体的,步骤s6中,水下掘进车1按照设定完成单层开挖后,再重复上述动作循环向下挖掘几层,开挖至预设深度后,通过管片提拉装置7向井内下放沉井管片3,并在井口位置对下一环沉井管片3进行拼装,整个过程循环步骤s3至步骤s5,直至向下挖掘至预设深度。
110.进一步的,步骤s6中,随着开挖深度的不断增加,同步下放相应的管路和线缆;其中,水下掘进车1的工作状态和位置可由地面的主控室8内的控制器进行远程控制,控制方式可采用有线控制或者无线控制。
111.在本发明的一个可选实施例中,在步骤s1之前(即:开始施工作业前),需要对开挖竖井的场地进行检测和加固处理,保证场地具备足够的承载能力。
112.在本发明的一个可选实施例中,步骤s1至步骤s6中,通过起吊装置回收连接于水下掘进车1上的起吊线缆106,将水下掘进车1提升至地面,从而可对挖掘作业完成后或者中间进行检修作业的水下掘进车1进行提升。
113.本发明的竖井挖掘施工方法的特点及优点是:
114.该竖井挖掘施工方法通过水下掘进车1即可对竖井进行开挖作业,水下掘进车1移动灵活,可适应不同断面形状和尺寸的竖井开挖,适用范围广,尤其适用于大断面竖井的挖掘,且水下掘进车1在对岩体进行掘进的同时,可将开挖产生的岩渣进行收集并外至地面,集开挖、收渣、排渣于一体,适应有水施工环境,整个过程无需人工下井,人员需求少,施工高效、安全。
115.以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。任何
本领域的技术人员,在不脱离本发明的构思和原则的前提下所作出的等同变化与修改,均应属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。