1.本发明属于矿用机械领域,涉及一种矿用巡检装置,具体涉及一种矿用单轨悬挂式巡检装置及使用方法。
背景技术:
2.当前,对于井下巡检机器人的研究是重点工程,而综采工作面的特殊工作环境对于巡检机器人的要求依旧是研究的共同难点,液压支架在工作面的位置和姿态是随着采煤工作的进行而不断变化的,这就要求巡检轨道能够随着液压支架位置和姿态的改变而做出相适应的调整,从而满足巡检机器人在轨道上的运动要求。
技术实现要素:
3.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种矿用单轨悬挂式巡检装置,该一种矿用单轨悬挂式巡检装置为解决上述技术问题,本发明提供如下技术方案:一种矿用单轨悬挂式巡检装置,所述装置设置在若干个液压支架下方,包括竖直液压缸、轨道、巡检机器人,所述竖直液压缸顶端与液压支架连接、底端与轨道连接,所述巡检机器人活动设置在轨道上;
4.所述轨道包括若干个单组轨道,所述每个液压支架下方设置一个单组轨道,所述单组轨道包括柔性轨道、刚性静止轨道和刚性滑动轨道,所述刚性静止轨道设置在中间位置且与竖直液压缸连接,所述柔性轨道的一端与刚性静止轨道连接、另一端与刚性滑动轨道连接,所述单组轨道之间通过刚性滑动轨道连接;
5.所述柔性轨道包括互相铰接的工字型单体,所述刚性滑动轨道包括第一连接单体和第二连接单体,所述单组轨道一端连接第一连接单体、另一端连接第二连接单体,相邻的单组轨道通过第一连接单体和第二连接单体活动连接;
6.所述巡检机器人包括行走机构、升降机构和检测机构,所述行走机构与轨道活动连接、用于带动巡检机器人沿轨道运动,所述升降机构顶端与行走机构连接、底端连接有检测机构。
7.优选的,所述行走机构包括箱体、驱动电机,差速机构,第一传动齿轮,第二传动齿轮、驱动轮,从动轮和导向轮,所述驱动电机与差速机构连接且设置在箱体内底部,所述差速机构两侧均连接有第一传动齿轮,所述第二传动齿轮与第一传动齿轮啮合且设置在第一传动齿轮上方,所述第二传动齿轮靠近轨道的一侧与驱动轮连接,所述驱动轮和从动轮均设置在轨道上且处于同一高度,所述导向轮一侧通过轴体与箱体侧壁连接,所述导向轮设置在轨道内壁上且一侧通过连接件与箱体顶壁连接。
8.优选的,所述升降机构包括驱动电机、升降机、内套筒、外套筒、第一定滑轮、第二定滑轮、第一钢丝绳、第二钢丝绳、螺母套筒,所述驱动电机和升降机设置在箱体底部,所述驱动电机的驱动轴与升降机连接,所述升降机的滚珠丝杠穿过箱体与螺母套筒上端连接,所述螺母套筒设置在外套筒内,所述内套筒设置在螺母套筒内,所述第一定滑轮与螺母套
筒底端连接且位于内套筒内,所述第一钢丝绳设置在第一定滑轮上且一端与内套筒连接、另一端与箱体连接,所述第二定滑轮设置在螺母套筒上,所述第二钢丝绳设置在第二定滑轮上且一端与内套筒连接、另一端与外套筒连接。
9.优选的,所述检测机构包括中控装置、分别与中控装置连接的红外热像仪、红外摄像头、补光装置、距离传感器、通讯装置。
10.优选的,所述第一连接单体一端设置有横向嵌入板和竖向嵌入板,所述第二连接单体一端中部设置有与竖向嵌入板匹配的竖向嵌入槽,所述竖向嵌入板前端安装有第一滑动件,所述第一滑动件竖直放置在竖向嵌入槽的上下两端的第一移动槽内,所述第二连接单体一端的上部和下部均设置有与横向嵌入板匹配的横向嵌入槽,所述横向嵌入板前端安装有第二滑动件,所述横向嵌入槽远离中部的外壁上开设有第二移动槽,所述第二滑动件竖直放置在横向嵌入槽内且一端放置在第二移动槽内。
11.优选的,所述柔性轨道通过连接件与刚性滑动轨道和刚性静止轨道连接,所述工字型单体之间通过连接件和t型连接件活动连接。
12.优选的,所述箱体、内套筒和外套筒的材质均为铝合金防爆材料。
13.优选的,所述升降机一侧连接有蜗轮蜗杆减速器。
14.一种根据矿用单轨悬挂式巡检装置的使用方法,包括以下步骤:
15.步骤一:在需要检测段的每个液压支架下方安装竖直液压缸,
16.步骤二:在每个竖直液压缸下方安装单组轨道,再将相邻的单组轨道连接组成轨道;
17.步骤三:保持轨道静止,在轨道上装入巡检机器人;
18.步骤四:开启行走机构,带动巡检机器人通过在轨道上行走,开启升降机构用于调整检测机构位置,开启检测机构进行需要检测段的检测;
19.步骤五:当需要检测段的若干个液压支架随工作面移动时,当轨道发生竖直方向错位时,通过竖直液压缸调整单组轨道高度,使轨道保持水平;当轨道发生水平方向错位时,柔性轨道和刚性滑动轨道随之弯曲保持轨道连接,使行走机构在轨道上移动;
20.步骤六:巡检机器人在需要检测段的轨道上移动,检测机构完成需要检测段的检测,将数据发送至控制终端。
21.有益效果:本发明通过轨道的可伸缩、可弯曲以及配合液压缸的使用,能够在液压支架随着采矿工作面移动时,仍然能够保持行走机构在轨道上继续行走,不会因轨道高度变化或者弯曲卡住行走机构,能够高效率的完成采矿工作区的检测工作,减少采矿事故的发生。
附图说明
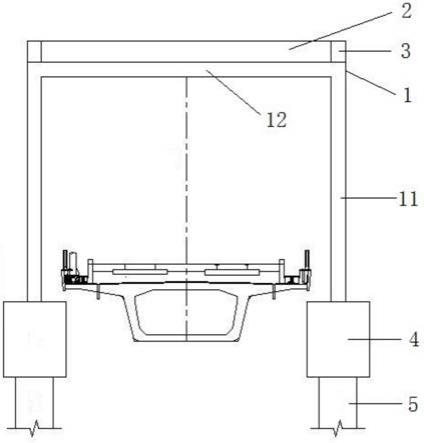
22.图1为本发明结构示意图;
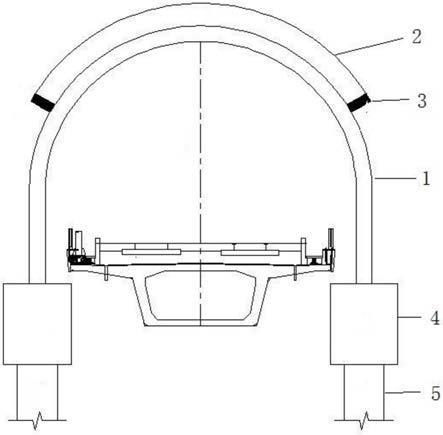
23.图2为本发明左视结构示意图;
24.图3为a处放大图;
25.图4为b处放大图;
26.图5为行走机构和升降机构装配示意图;
27.图6为升降机构内部结构示意图;
28.图7为检测机构系统框图;
29.图8为第一连接单体结构示意图;
30.图9为第二连接单体结构示意图;
31.图10为第一连接单体和第二连接单体连接状态示意图;
32.图11为轨道处于错位状态时结构示意图;
33.图中符号说明:1:液压支架;2:竖直液压缸;3:轨道;301:单组轨道;4:巡检机器人;5:柔性轨道;501:工字型单体;6:刚性静止轨道;7:刚性滑动轨道;701:第一连接单体;702:第二连接单体;703:横向嵌入板;704:竖向嵌入板;705:竖向嵌入槽;706:第一滑动件;707:横向嵌入槽;708:第二滑动件;709:第一移动槽;710:第二移动槽;8:行走机构;801:驱动电机;802:差速机构;803:第一传动齿轮;804:第二传动齿轮;805:驱动轮;806:从动轮;807:导向轮;810:箱体:9:升降机构;901:驱动电机;902:升降机;903:内套筒;904:外套筒;905:第一定滑轮;906:第二定滑轮;907:第一钢丝绳;908:第二钢丝绳;909:螺母套筒;910:滚珠丝杠;911:蜗轮蜗杆减速器;10:检测机构;101:中控装置;102:红外热像仪;103:红外摄像头;104:补光装置;105:距离传感器;106:通讯装置;11:连接件;12:t型连接件。
具体实施方式
34.下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
35.本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
36.实施例1:
37.参考图1
‑
11,本发明提供一种技术方案,一种矿用单轨悬挂式巡检装置,装置设置在若干个液压支架1下方,包括竖直液压缸2、轨道3、巡检机器人4,竖直液压缸2顶端与液压支架1连接、底端与轨道3连接,巡检机器人4活动设置在轨道3上;
38.轨道3包括若干个单组轨道301,每个液压支架1下方设置一个单组轨道301,单组轨道301包括柔性轨道5、刚性静止轨道6和刚性滑动轨道7,刚性静止轨道6设置在中间位置且与竖直液压缸2连接,柔性轨道5的一端与刚性静止轨道6连接、另一端与刚性滑动轨道7连接,单组轨道301之间通过刚性滑动轨道7连接;
39.柔性轨道5包括互相铰接的工字型单体501,刚性滑动轨道7包括第一连接单体701和第二连接单体702,单组轨道301一端连接第一连接单体701、另一端连接第二连接单体702,相邻的单组轨道301通过第一连接单体701和第二连接单体702活动连接;
40.巡检机器人4包括行走机构8、升降机构9和检测机构10,行走机构8与轨道3活动连接、用于带动巡检机器人4沿轨道3运动,升降机构9顶端与行走机构8连接、底端连接有检测机构10。
41.本装置根据需要设置在液压支架1下方,由竖直液压缸2连接液压支架1,每个液压支架1下方设置一个单组轨道301,单组轨道301互相连接形成轨道3,刚性静止轨道6与竖直液压缸2底端连接,使整个轨道3保持悬挂状态,柔性轨道5连接在刚性静止轨道6的两端,刚
性滑动轨道7,用于连接相邻的单组轨道301,互相铰接的工字型单体501在发生错位时,可以发生一定角度的弯曲,单组轨道301的两端分别设置有第一连接单体701和第二连接单体702,用于将相邻的单组轨道301连接起来,且能够发生一定角度的弯曲,在对应的液压支架1前后移动时可以随之弯曲,行走机构8放置在轨道3上能够沿着轨道3移动,带动整个巡检机器人4的升降机构9和检测机构10进行移动,升降机构9能够沿竖直方向调节高度,从而根据需求对检测机构10的高度进行调节,完成对采矿区的检测工作,将信息传输至采矿作业的总控室。
42.进一步地,行走机构8包括箱体810、驱动电机801,差速机构802,第一传动齿轮803,第二传动齿轮804、驱动轮805,从动轮806和导向轮807,驱动电机801与差速机构802连接且设置在箱体810内底部,差速机构802两侧均连接有第一传动齿轮803,第二传动齿轮804与第一传动齿轮803啮合且设置在第一传动齿轮803上方,第二传动齿轮804靠近轨道3的一侧与驱动轮805连接,驱动轮805和从动轮806均设置在轨道3上且处于同一高度,导向轮807一侧通过轴体与箱体810侧壁连接,导向轮807设置在轨道3内壁上且一侧通过连接件与箱体810顶壁连接;驱动电机801驱动第一传动齿轮803,第一传动齿轮803带动第二传动齿轮804传动,驱动轮805在第二传动齿轮804的带动下沿着轨道3进行移动,从动轮806一端与箱体810连接进行位置固定,从而在轨道3上运动保持整个行走机构8的水平状态,导向轮807一端与箱体810内壁上方固定,从而在轨道3上方移动起到引导作用,防止行走机构8在弯曲段依然直走卡住,差速机构802以及导向轮807合作使得其能够平稳通过液压支架错位时弯曲的轨道。
43.进一步地,升降机构9包括驱动电机901、升降机902、内套筒903、外套筒904、第一定滑轮905、第二定滑轮906、第一钢丝绳907、第二钢丝绳908、螺母套筒909,驱动电机901和升降机902设置在箱体810底部,驱动电机901的驱动轴与升降机902连接,升降机902的滚珠丝杠910穿过箱体801与螺母套筒909上端连接,螺母套筒909设置在外套筒904内,内套筒903设置在螺母套筒909内,第一定滑轮905与螺母套筒909底端连接且位于内套筒903内,第一钢丝绳907设置在第一定滑轮905上且一端与内套筒903连接、另一端与箱体810连接,第二定滑轮906设置在螺母套筒909上,第二钢丝绳908设置在第二定滑轮906上且一端与内套筒903连接、另一端与外套筒904连接,需要调整检测机构10的高度时,向下时,驱动电机901驱动升降机902的滚珠丝杠910向下移动,带动螺母套筒909向下移动,第一定滑轮905和第二定滑轮906也随之向下移动,由于第一钢丝绳907一端固定在箱体810上、一端与内套筒903连接,第二钢丝绳908有单固定在外套筒904上,一端与内套筒903连接,内套筒903将随着向下同步移动,且内套筒903的伸缩量等于螺母套筒909的伸缩量,当需要向上移动时,只需要用升降机902带动滚珠丝杠910上升就可以完成内套筒903上升,检测机构10固定在内套筒903底部可以随之调整高度。
44.进一步地,检测机构10包括中控装置101、分别与中控装置101连接的红外热像仪102、红外摄像头103、补光装置104、距离传感器105、通讯装置106,距离传感器105的作用是检测煤壁或设备到巡检机器人4的距离;红外热像仪102用于观测矿井下工作去的温度分布,红外摄像头103用于捕捉井下的实时画面,补光装置104在暗光环境下开启进行补光,红外热像仪102、红外摄像头103和距离传感器105可以将采集到的数据传输至中控装置101,中控装置101控制通讯装置106将采集到的信息发回总控室,进行实时监控,便于预警和提
醒安全人员采取应急措施。
45.进一步地,第一连接单体701一端设置有横向嵌入板703和竖向嵌入板704,第二连接单体702一端中部设置有与竖向嵌入板704匹配的竖向嵌入槽705,竖向嵌入板704前端安装有第一滑动件706,第一滑动件706竖直放置在竖向嵌入槽705的上下两端的第一移动槽709内,第二连接单体702一端的上部和下部均设置有与横向嵌入板703匹配的横向嵌入槽707,横向嵌入板703前端安装有第二滑动件708,横向嵌入槽707远离中部的外壁上开设有第二移动槽710,第二滑动件708竖直放置在横向嵌入槽707内且一端放置在第二移动槽710内,连接时,横向嵌入板703放入横向嵌入槽707,第二滑动件708底端在横向嵌入槽707内,顶端在第二移动槽710内,第二滑动件708可以沿着第二移动槽710移动,且能够旋转一定角度,竖向嵌入板704放入竖向嵌入槽705内,第一滑动件706卡入移动槽709内,能够沿着移动槽709进行移动,且能够旋转移动角度,通过第一连接单体701和第二连接单体702的连接使相邻的单组轨道301连接形成轨道3,连接处能够拉伸一定距离且可以转动一定角度,适合多种情况使用。
46.进一步地,柔性轨道5通过连接件11与刚性滑动轨道7和刚性静止轨道6连接,工字型单体501之间通过连接件11和t型连接件12活动连接,通过连接件11和t型连接件12进行活动连接。
47.进一步地,箱体810、内套筒903和外套筒904的材质均为铝合金防爆材料。
48.进一步地,升降机902一侧连接有蜗轮蜗杆减速器911,起匹配转速和传递转矩的作用。
49.实施例2:
50.参考图1
‑
11,在实施例1的基础上,一种矿用单轨悬挂式巡检装置的使用方法,包括以下步骤:
51.步骤一:在需要检测段的每个液压支架1下方安装竖直液压缸2,每个液压支架1下方可以安装两个竖直液压缸2,
52.步骤二:在每个竖直液压缸2下方安装单组轨道301,刚性静止轨道6设置在中间位置且与竖直液压缸2连接,再将相邻的单组轨道301连接组成轨道3;
53.步骤三:保持轨道3静止,在轨道3上装入巡检机器人4;
54.步骤四:开启行走机构8,带动巡检机器人4通过在轨道3上行走,开启升降机构8用于调整检测机构10位置,开启检测机构10进行需要检测段的检测;
55.步骤五:当需要检测段的若干个液压支架1随工作面移动时,当轨道3发生竖直方向错位时,通过竖直液压缸2调整单组轨道301高度,使轨道3保持水平;如图10和11,当轨道3发生水平方向错位时,柔性轨道5和刚性滑动轨道7随之弯曲保持轨道3连接,使行走机构8在轨道3上移动;
56.步骤六:巡检机器人4在需要检测段的轨道3上移动,检测机构10完成需要检测段的检测,将数据发送至总控室的控制终端。
57.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。