1.本发明涉及一种监视移动体的移动体监视系统和移动体监视方法。
背景技术:
2.最近,为了减轻驾驶员的驾驶负荷并且实现安全舒适的车辆运行,而逐渐普及具有自动驾驶功能的自动驾驶车辆。为了实现自动驾驶车辆的安全运行,在自动驾驶车辆所具有的驾驶辅助装置中,要求准确地掌握包含存在于该车辆周围的护栏、交通信号灯、标识等目标物以及其他车辆、摩托车、自行车、行人等交通参与者在内的物体的分布信息。
3.为了满足这样的要求,例如在专利文献1中记载了障碍物地图生成装置的发明,障碍物地图生成装置使用由障碍物观测机构观测到的障碍物的信息,生成表明可移动区域、障碍物占有区域、死角区域的障碍物地图。详细而言,专利文献1所涉及的障碍物地图生成装置的发明中,具有:障碍物信息获取部,其获取由障碍物观测机构观测到的障碍物的信息;计算部,其根据由障碍物信息获取部获取到的障碍物的信息,计算障碍物的位置;假想点设定部,其将与设置有障碍物观测机构的位置不同的位置设定为假想点;和假想区域确定部,其根据假想点的位置以及障碍物的位置,以假想点的位置为基点来确定可移动区域以及死角区域。
4.根据专利文献1所涉及的障碍物地图生成装置,通过提供与障碍物的分布信息有关的障碍物地图,能够有助于实现自动驾驶车辆的安全运行。[现有技术文献][专利文献]
[0005]
专利文献1:日本发明专利公开公报特开2020
‑
4144号
技术实现要素:
[发明所要解决的技术问题]
[0006]
但是,根据专利文献1所涉及的障碍物地图生成装置的发明,依然存在难以准确而无遗漏地掌握与某观测地点的死角区域中不明移动体有关的信息的技术问题。另外,还存在质疑与不明移动体有关的信息的可靠性的技术问题。
[0007]
本发明是鉴于上述实际情况而完成的,其技术问题在于提供一种能够提高与某观测地点的死角区域中的不明移动体有关的信息的准确度的移动体监视系统以及移动体监视方法。[用于解决技术问题的技术方案]
[0008]
为了解决上述技术问题,本发明(1)所涉及的移动体监视系统具有终端装置和监视装置,其中所述监视装置通过收集有关所述终端装置周围的不明移动体的信息来监视所述不明移动体,其最主要特征在于,所述终端装置具有信息获取部、终端侧判定部、不在时间信息生成部和终端侧通信部,其中,所述信息获取部获取包括所述不明移动体存在与否
的信息的不明移动体信息,所述终端侧判定部进行与规定的监视区域有关的所述不明移动体存在与否的判定,在由所述终端侧判定部作出所述不明移动体不在所述监视区域中的判定的情况下,所述不在时间信息生成部生成有关不明移动体的不在时间信息,该有关不明移动体的不在时间信息是指在与所述监视区域有关的不明移动体的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到的信息,所述终端侧通信部发送生成的所述不在时间信息,所述监视装置具有综合侧通信部和综合侧判定部,其中,所述综合侧通信部接收从所述终端侧通信部发送来的不在时间信息,所述综合侧判定部根据接收到的所述不在时间信息来作出在基于所述时间信息的时间段中与所述监视区域有关的不明移动体不在的判定,关于接收到的所述不在时间信息,所述综合侧判定部根据基于所述时间信息的时间段重叠的不在时间信息的数量来设定所述不在信息的准确度。[发明效果]
[0009]
根据本发明,能够提高与某观测地点的死角区域中的不明移动体有关的不在信息的准确度。
附图说明
[0010]
图1是表示本发明的实施方式所涉及的移动体监视系统的概要的整体结构图。图2是表示设置有终端装置的车载设备的概略结构的功能框图。图3是在本发明的实施方式所涉及的移动体监视系统中从终端装置向监视装置发送的通信帧的概略结构图。图4是表示监视装置的概略结构的功能框图。图5是表示在本发明的实施方式所涉及的移动体监视系统中,终端装置(应答方)和监视装置(请求方)各自依次进行的信息处理步骤的图。图6是表示本发明的实施方式的变形例所涉及的移动体监视系统的概要的整体结构图。[附图标记说明]11:移动体监视系统;13:不明移动体;15:车辆(移动体);17:终端装置;19:监视装置;21:路侧设备;61:信息获取部;62:终端侧判定部;63:不在时间信息生成部;65:终端侧通信部;91:综合侧通信部;93:综合侧判定部。
具体实施方式
[0011]
下面,参照附图详细说明本发明的实施方式所涉及的移动体监视系统和移动体监视方法。此外,在以下所示的附图中,对具有相同的功能且不需要彼此区分的部件标注相同的参照标记。另外,为了便于说明,有时以变形或夸张的方式来示意性表示部件的尺寸和形状。
[0012]
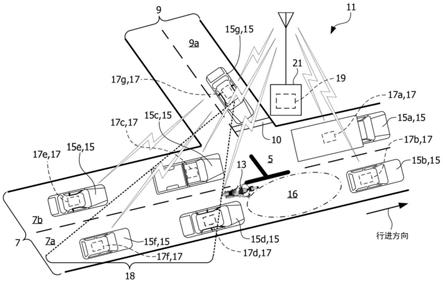
〔移动体监视系统11的结构〕首先,参照图1说明本发明的实施方式所涉及的移动体监视系统11的结构。图1是表示本发明的实施方式所涉及的移动体监视系统11的概要的整体结构图。如图1所示,本发明的实施方式所涉及的移动体监视系统11具有综合通过车车间
通信或者路车间通信获取到的与各个检测地点处的不明移动体13有关的信息来监视不明移动体13的的监视功能。
[0013]
为了实现上述监视功能,如图1所示,移动体监视系统11构成为具有多台车辆分别具有的多个终端装置和一个监视装置19。在不需要特别地区分多台车辆的情况下,将这些车辆仅统称为车辆15。同样,在不需要特别地区分多个终端装置的情况下,将这些装置仅统称为终端装置17。多台车辆分别相当于本发明的“移动体”。本发明的“移动体”假定为例如大型车辆、普通车辆、摩托车、自行车、行人等能够移动的所有物体。监视装置19例如被设置于路侧设备21。监视装置19具有与多个终端装置协同工作,来监视多台车辆各自周围的不明移动体13的功能。
[0014]
在此,不明移动体13是指,局部或整体进入某观测地点(在图1的例子中是车辆15g)的死角区域18的移动体,该移动体例如为存在于本车辆15周围的其他车辆、摩托车、自行车、行人等。尤其是,在本发明中,不明移动体13假定为,以与本车辆15及其周边的其他车辆的速度(包括停车)不同的速度移动等、表示出可疑行为的所有移动体。某观测地点的死角区域18是指,从该观测地点不能直接看到的区域,是在包含存在于该观测地点周围的物体、标识的目标物的背后扩展的区域。将这样的不明移动体13作为监视对象是基于以下理由:根据本发明人的认知,有存在这样的不明移动体13会扰乱交通流从而引发交通事故的盖然性高的倾向。
[0015]
接着,说明搭载在各车辆15上的终端装置17和监视装置19的设置环境。在图1中,表示了通过t字路交叉路口5附近的不明移动体13和多台车辆在图1所示的t字路交叉路口5,单侧双车道的干线道路7和单侧一车道的支线道路9呈t字形状交叉。
[0016]
在单侧双车道的干线道路7上,在右侧车道7a上的3台车辆15b、15d、15f,和在左侧车道7b上的3台车辆15a、15c、15e分别朝向行进方向缓慢行进。这些各车辆分别具有作为应答方的终端装置作为应答方的终端装置是指不在时间信息的提供方。总之,在图1所示的干线道路7上分别配设有存在于右侧车道7a上的3台车辆15b、15d、15f各自所具有的3个终端装置17b、17d、17f,和存在于左侧车道7b上的3台车辆15a、15c、15e各自所具有的3个终端装置17a、17c、17e。
[0017]
另外,在单侧一车道的支线道路9上,一台车辆15g朝向行进方向在左侧行驶车道9a上在停止线10处停车。该车辆15g具有作为请求方的终端装置17g。作为请求方的终端装置17g是指,请求提供不在时间信息的一方。总之,在图1所示的支线道路9上设置有存在于行驶车道9a上的一台车辆15g所具有的一个终端装置17g。该车辆15g的驾驶员在等待向优先道路即干线道路7中的右侧车道7a上的车辆15b与车辆15d之间的车间间隙16合流的机会。
[0018]
不明移动体13没有特别地限定,例如是摩托车。不明移动体13朝着干线道路7的右侧车道7a中缓慢行驶中的车辆15f、15d的行进方向以比周围的车辆15高的速度行驶而从左侧穿过。
监视装置19设置在图1所示的t字路交叉路口5中朝向支线道路9的行进方向的左侧角部。此外,该t字路交叉路口5没有特别地限定,例如是交通事故的多发地点。
[0019]
在本t字路交叉路口5的存在的问题是,在拥堵时因为存在死角而无法完全看到包括在干线道路7上行驶中的不明移动体13和车辆15的所有障碍物的移动。在图1所示的例子中,从支线道路9的行驶车道9a中在停止线10处正处于停车等待状态的车辆15g的驾驶员来看,在车辆15c的背后存在死角区域18。车辆15f的整体、还有车辆15d的后部进入到该死角区域18中。不明移动体13没有进入死角区域18。假设,不明移动体13的整体进入到车辆15g的驾驶员的死角区域18,并且,不明移动体13想要以比车辆15高的速度从构成车队的多台所述车辆15彼此的间隙中进入t字路交叉路口5。
[0020]
在这样的情况下,若车辆15g的驾驶员想要合流到干线道路7中的右侧车道7a的车辆15b与车辆15d之间的车间间隙16,而仅注意车辆15d的动作就进入t字路交叉路口5,则有可能与不明移动体13迎面碰撞。
[0021]
因此,在本发明的实施方式所涉及的移动体监视系统11中,综合通过车车间通信或路车间通信获取到的在各个检测地点处的有关不明移动体13的不在时间信息(在后面叙述详细内容)来监视车辆15g的死角区域18,由此,能够显著提高与该死角区域18中存在的不明移动体13有关的不在信息的准确度。
[0022]
〔设置有终端装置17的车载设备31的结构〕接着,参照图2对设置有终端装置17的车载设备31的结构进行说明。图2是表示设置有终端装置17的车载设备31的概略结构的功能框图。
[0023]
如图2所示,车载设备31具有输入输出装置33和车辆控制装置35,该车辆控制装置35具有终端装置17和驾驶辅助装置34。车辆控制装置35连接于驾驶装置37。
[0024]
如图2所示,输入输出装置33构成为具有外界传感器41、导航装置43、v2x通信设备45、本车状态传感器47、hmi(human machine interface,人机接口)49。
[0025]
[外界传感器41]外界传感器41具有检测与包括本车辆15周围的物体、标识的目标物有关的外界信息的功能。外界传感器41构成为包括摄像头51、雷达53和激光雷达55。摄像头51具有向本车辆前方的斜下方倾斜的光轴,并具有拍摄本车辆15的行进方向图像的功能。作为摄像头51,例如可适当使用cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)摄像头、ccd(charge coupled device,电荷耦合器件)摄像头等。摄像头51被设置于本车辆15的车厢内的后视镜(未图示)附近、以及本车辆15的车厢外的右侧车门前部、左侧车门前部等。
[0026]
摄像头51基本上周期性地反复拍摄本车辆15的行进方向前方、右后侧方、左后侧方、后方的外界图像。但是,在产生了来自车辆控制装置35的获取移动体监视信息的获取请求的情况下,在按照该获取请求的时刻拍摄所述外界图像。
[0027]
在本实施方式中,设置在后视镜附近的摄像头51例如并排设置一对单眼摄像头而成。但是,摄像头51也可以是立体摄像头。由摄像头51拍摄到的本车辆15的行进方向前方、右后侧方、左后侧方、后方的图像
信息被发送给车辆控制装置35。
[0028]
雷达53具有以下功能:向包含在本车辆15的前方行驶的成为追随对象的前方车辆的目标物照射雷达波,另一方面,接收由目标物反射的雷达波,由此获取包括到目标物的距离、目标物的方位的目标物的分布信息。作为雷达波,可以适当使用激光、微波、毫米波、超声波等。在本实施方式中,雷达53例如在前侧设置有3个,在后侧设置有2个,而共计设置有5个。雷达53的目标物的分布信息被发送给车辆控制装置35。
[0029]
激光雷达55(lidar:light detection and ranging,光检测和测距)例如具有以下功能:通过测量相对于照射光的散射光的检测所需的时间,来检测目标物的有无以及到目标物的距离。在本实施方式中,例如,激光雷达55在前侧设置有2个,在后侧设置有3个,而共计设置有5个。由激光雷达55获取的目标物的分布信息被发送给车辆控制装置35。
[0030]
[导航装置43]导航装置43具有以下功能:将本车辆15的当前位置绘制到地图上并且进行到目的地的路径引导等。导航装置43构成为具有gnss(global navigation satellite system,全球导航系统)接收机、导航地图信息、作为人机接口发挥功能的触摸屏式的显示装置、扬声器、麦克风(均未图示)等。导航装置43通过gnss接收机来推断本车辆15的当前位置,并且导出从当前位置到由用户指定的目的地的路径。由导航装置43推断出的本车辆15的当前位置、以及由导航装置43导出的到目的地的路径被提供给车辆控制装置35。
[0031]
[v2x通信设备45]v2x通信设备45具有以下功能:经由无线通信介质与除了本车辆15以外的周边车辆15进行车车间通信(v2v通信)、或者与在本车辆15行驶的干线道路7上设置的路侧设备21进行路车间通信(v2r通信)。v2x通信设备45的通信协议没有特别地限定,但是,例如,可以适当地使用tcp/ip。v2x通信设备45将由不在时间信息生成部63(详细内容后面叙述)生成的不在时间信息(参照图3)向除了本车辆15以外的周边车辆15和路侧设备21广播(广播发送)。
[0032]
[本车状态传感器47]本车状态传感器47具有获取与本车辆15的状态有关的本车状态信息的功能。由本车状态传感器47获取到的本车状态信息被发送给车辆控制装置35。作为本车状态传感器47,包括用于检测车辆15的行为的例如速度传感器、加速度传感器、操舵角传感器、偏航角速率传感器、位置传感器、方位传感器。另外,作为本车状态传感器47,也可以包括检测驾驶员的行动(斜视)、生物体信息(例如心率、清醒度)的传感器。
[0033]
[hmi49]hmi49具有驾驶操作系统的构成部件和非驾驶操作系统的构成部件。它们的界限并不明确,也可以采用驾驶操作系统的构成部件具有非驾驶操作系统的功能的结构(或与之相反)。
[0034]
hmi49例如包括加速踏板、加速器开度传感器和加速踏板反作用力输出装置、制动踏板和制动踏板踩踏量传感器、变速杆和变速杆位置传感器、方向盘、方向盘操舵角传感器
和转向转矩传感器,作为驾驶操作系统的构成部件。
[0035]
另外,hmi49例如包括被设置于控制台的多功能显示器、扬声器、各种操作开关、座椅和座椅驱动装置、车窗玻璃和车窗玻璃驱动装置以及车厢内摄像头,作为非驾驶操作系统的构成部件。
[0036]
〔车辆控制装置35的结构〕接着,参照图2和图3说明被搭载于本车辆15的车辆控制装置35的内部结构。图3是在本发明所涉及的移动体监视系统11中从终端装置17向监视装置19发送的通信帧39的概略结构图。
[0037]
车辆控制装置35例如由一个以上的处理器或具有同等功能的硬件来实现。车辆控制装置35也可以是由cpu(central processing unit)等处理器、存储装置以及通信接口通过内部总线连接的ecu(electronic control unit,电子控制单元)、或者mpu(micro
‑
processing unit,微处理单元)等组合而成的结构。
[0038]
详细而言,车辆控制装置35具有通过搭载于本车辆15的外界传感器41生成与本车辆15周围的不明移动体13有关的不在时间信息的功能、广播发送所生成的不在时间信息的功能、以及进行包括本车辆15的加减速、操舵的本车辆15的驾驶辅助的功能。为了实现上述功能,如图2所示,车辆控制装置35具有终端装置17和驾驶辅助装置34。
[0039]
〔终端装置17的结构〕接着,参照图2对车辆控制装置35所具有的终端装置17进行说明。如图2所示,车辆控制装置35所具有的终端装置17构成为具有信息获取部61、终端侧判定部62、不在时间信息生成部63和终端侧通信部65。
[0040]
信息获取部61具有获取不明移动体信息的功能,其中不明移动体信息包括本车辆15周围的不明移动体13的存在与否信息及位置信息。但是,不明移动体13的位置信息在不明移动体13存在的情况下获取。
[0041]
不明移动体13的存在与否信息是指,在本车辆15的周围是否存在不明移动体13的信息。另外,不明移动体13的位置信息是指,在通过外界传感器41获取到与不明移动体13有关的信息的时间点的不明移动体13的位置信息(例如,三维坐标)。在存在多个不明移动体13的情况下,不明移动体13的存在与否信息和位置信息按照彼此不同的每个不明移动体13建立对应关系来获取。如图3所示,包含不明移动体13的存在与否信息和位置信息的不明移动体信息被用作通信帧39的信息。
[0042]
终端侧判定部62具有进行与规定的监视区域有关的不明移动体13存在与否的判定的功能。在本发明所涉及的实施方式中,规定的监视区域与某(任意)观测地点的死角区域18同义。在本发明所涉及的实施方式中,采用以下结构:从监视装置19向终端装置17发送应设定规定的监视区域即某观测地点的死角区域18的意思的信息,终端装置17设定规定的监视区域即某观测地点的死角区域18。另外,进行与规定的监视区域有关的不明移动体13存在与否的判定是指,进行某观测地点的死角区域18中不明移动体13存在与否的判定。在后面对这些的详细情况进行叙述。
[0043]
如图3所示,不在时间信息生成部63具有以下功能:在由终端侧判定部62作出了不明移动体13不在监视区域(某观测地点的死角区域18)的判定的情况下,生成有关不明移动体的不在时间信息,该有关不明移动体的不在时间信息是指在与该监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时刻信息之后得到的信息。
[0044]
作出该不在的判定的时间点的时间信息是指,终端侧判定部62作出了不明移动体13不在监视区域(死角区域18)的判定的时间点的时刻信息。该时刻信息也可以是某种程度的一段时间。因此,在本发明所涉及的实施方式中,将时刻信息定义为作为其上位概念的时间信息。有关不明移动体的不在时间信息主要是指,表示不明移动体13在某时间段不在监视区域(死角区域18)的信息。
[0045]
所述时刻信息用绝对时刻来表现。绝对时刻是指,作为从协调世界时(utc)中的规定时刻起的形式上的经过秒数(从实质上的经过秒数中减去其间插入的闰秒、加上被删除的闰秒而得到的秒数)来表现的时刻等、能够高精度共享的时刻。
[0046]
如图3所示,有关不明移动体13的不在时间信息被用作通信帧39的信息。加载于通信帧39的信息,除了不在时间信息之外,还包含由本车识别信息、本车位置信息和发送时刻信息构成的本车信息、以及收信方信息(未图示)。本车识别信息是指,能够唯一地识别本车辆15的本车辆15所固有的信息。具体而言,例如,本车辆15所带有的车牌号码相当于本车辆识别信息。本车位置信息是指,在通过外界传感器41获取到与不明移动体13有关的信息的时刻的本车辆15的位置信息(例如,三维坐标)。发送时刻信息是指,终端装置17向监视装置19发送通信帧39的时刻(时间戳)。收信方信息是指,与通信帧39的收信方有关的信息。在本发明所涉及的实施方式中,通信帧39的收信方信息被设定为“广播”。这是基于以下理由:在本发明中,在不知道收信方信息的多台车辆15通行的交叉路口等处,需要向多台车辆15发送包含所需信息的通信帧39。
[0047]
终端侧通信部65具有将包含由不在时间信息生成部63生成的有关不明移动体13的不在时间信息的通信帧39向基于收信方信息(广播)的规定的收信方发送的功能。
[0048]
终端装置17所具有的信息获取部61、终端侧判定部62、不在时间信息生成部63和终端侧通信部65的各部的功能通过处理器执行程序(软件)来实现。另外,这些功能中的一部分或全也可以通过ls i(large scale integration,大规模集成电路)、asic(application specific integrated circuit)等硬件来实现,也可以通过软件和硬件的组合来实现。
[0049]
〔驾驶辅助装置34的结构〕如图2所示,车辆控制装置35所具有的驾驶辅助装置34构成为具有外界信息获取部71、识别部73、驾驶辅助控制部75和行驶显示控制部77。
[0050]
外界信息获取部71具有获取与包含车辆15周围的物体、标识的目标物有关的外界信息的功能。由外界信息获取部71获取到的外界信息被发送给识别部73。
[0051]
识别部73具有本车位置识别功能、外界识别功能、行动计划生成功能和轨迹生成
功能等。在本车位置识别功能中,识别本车辆15的行驶车道和本车辆15相对于行驶车道的相对位置。在外界识别功能中,识别包含周边车辆15的位置、车速、加速度的外界状态。在行动计划生成功能中,设定自动驾驶的开始地点、目的地。在轨迹生成功能中,基于由行动计划生成功能生成的行动计划,生成本车辆15应行驶的轨迹。由识别部73识别出的本车位置信息和外界信息被发送给驾驶辅助控制部75。另外,由识别部73设定的与自动驾驶的开始地点和/或自动驾驶的目的地有关的信息被发送给驾驶辅助控制部75。并且,由识别部73生成的本车辆15应行驶的轨迹的信息被发送给驾驶辅助控制部75。
[0052]
驾驶辅助控制部75具有根据驾驶员的操作、由行动计划生成功能设定的自动驾驶的开始地点/目的地、由轨迹生成功能生成的本车辆15应行驶的轨迹等,来确定包括驱动力控制、操舵控制、制动力控制在内的驾驶辅助控制的方针的功能。由驾驶辅助控制部75确定的驾驶辅助控制的方针被发送给行驶显示控制部77。
[0053]
行驶显示控制部77按照由驾驶辅助控制部75确定的驾驶辅助的控制方针,进行包含驱动力控制、操舵控制、制动力控制在内的本车辆15的行驶控制。另外,行驶显示控制部77进行本车辆15所具有的显示装置的显示控制。
[0054]
驾驶辅助装置34所具有的外界信息获取部71、识别部73、驾驶辅助控制部75以及行驶显示控制部77的各部的功能通过处理器执行程序(软件)来实现。此外,这些功能中的一部分或者全部可以通过lsi(large scale integration,大规模集成电路)、asic(application specific integrated circuit,专用集成电路)等硬件来实现,也可以通过软件和硬件的组合来实现。
[0055]
〔驾驶装置37的结构〕如图2所示,驾驶装置37构成为具有驱动装置81、操舵装置83和制动装置85。
[0056]
驱动装置81按照车辆控制装置35所具有的驾驶辅助装置34的控制指令,将用于使本车辆15行驶的驱动力(转矩)输出给驱动轮。另外,在本车辆15例如是使用内燃机发动机作为动力源的汽车的情况下,驱动装置81包括内燃机发动机、变速器和控制内燃机发动机的发动机ecu(electronic control unit,电子控制单元,均未图示)。另外,在本车辆15是以电动机为动力源的电动汽车的情况下,驱动装置81包括牵引马达和控制牵引马达的马达ecu(均未图示)。此外,在本车辆15为混合动力汽车的情况下,驱动装置81包括内燃机发动机、变速器、发动机ecu、牵引马达和马达ecu(均未图示)。
[0057]
操舵装置83例如具有转向ecu和电动马达(均未图示)。电动马达例如使力作用于齿条齿轮机构来改变转舵轮的朝向。转向ecu按照车辆控制装置35所具有的驾驶辅助装置34的控制指令、或者按照基于驾驶员的方向盘操作的操舵角、操舵转矩的信息,来驱动电动马达,改变转舵轮的朝向。
[0058]
制动装置85例如是具有制动钳(brake caliper)、向制动钳传递液压的缸、使缸产
生液压的电动马达、和制动控制部的电动伺服制动装置(均未图示)。电动伺服制动装置的制动控制部按照车辆控制装置35所具有的驾驶辅助装置34的控制指令来控制电动马达,以将与制动操作对应的制动转矩输出给各车轮的方式进行动作。
[0059]
〔监视装置19的结构〕接着,参照图4说明路侧设备21所具有的监视装置19。图4是表示监视装置19的概略结构的功能框图。路侧设备21所具有的监视装置19例如由一个以上的处理器或者具有同等功能的硬件来实现。监视装置19可以由cpu(central processing unit)等处理器、存储装置以及通信接口通过内部总线连接的ecu(electronic control unit,电子控制单元)、或者mpu(micro
‑
processing unit,微处理单元)等组合而成的结构。
[0060]
路侧设备21除了监视装置19之外还具有gps接收部99和外界传感器41。因此,在说明监视装置19之前,先说明gps接收部99和外界传感器41。gps接收部99具有接收来自多个gps卫星的定位信号并根据这些定位信号来测定路侧设备21的绝对位置(纬度、经度、高度)的功能。外界传感器41具有检测和获取与包含存在于路侧设备21的周围的物体、标识的目标物有关的外界信息的功能。
[0061]
如图4所示,监视装置19构成为具有综合侧通信部91和综合侧判定部93。
[0062]
如图4所示,综合侧通信部91具有以下功能:接收从分别搭载在多台车辆15的各车辆15上的各终端装置17所具有的各终端侧通信部65分别发送来的多个有关不明移动体13的不在时间信息。由综合侧通信部91接收到的多个有关不明移动体13的不在时间信息被发送给综合侧判定部93。
[0063]
综合侧判定部93基本上具有以下功能:根据由综合侧通信部91接收到的多个有关不明移动体13的不在时间信息,来进行不明移动体13存在与否的判定。详细而言,综合侧判定部93根据由综合侧通信部91接收到的多个不在时间信息,作出在基于不在判定时间点的时刻信息(时间信息)的时间段中与监视区域(视野区域18)有关的不明移动体13不在的判定。
[0064]
为了实现所述功能,如图4所示,综合侧判定部93构成为具有死角区域判定部95和准确度设定部97。
[0065]
死角区域判定部95具有判定在某观测地点(在图1的例子中为车辆15g)的死角区域18中是否存在不明移动体13的功能。如上所述,某观测地点的死角区域18是指,从该观测地点不能直接看到的区域,是在包含存在于该观测地点周围的物体、标识的目标物的背后扩展的区域。
[0066]
在判定某观测地点的死角区域18中是否存在不明移动体13时,例如,可以适当采用在本技术人提出的专利申请公开公报(国际公开号:wo2018/216194)中记载的与死角区域判定有关的技术。该公报所记载的与死角区域判定相关的技术,通过本引用而成为本发明的记载事项的一部分(在某观测地点的死角区域18中是否存在不明移动体13的判定技术)。
[0067]
准确度设定部97具有以下功能:根据由综合侧通信部91接收到的多个不在时间信息中基于不在判定时间点的时刻信息(时间信息)的时间段重叠的不在时间信息的数量,来
设定不明移动体13的不在信息的准确度。不在信息的准确度是指,衡量不在时间信息中所包含的、不明移动体13在规定的时间段不在监视区域(死角区域18)的意思的不在信息的准确度的指标。存在多种用于设定不在信息的准确度时的算法。对此,在后面详细叙述。
[0068]
监视装置19所具有的综合侧通信部91和综合侧判定部93的各部分的功能通过处理器执行程序(软件)来实现。此外,这些功能中的一部分或者全部可以通过lsi(large scale integration,大规模集成电路)、asic(application specific integrated circuit,专用集成电路)等硬件来实现,也可以通过软件和硬件的组合来实现。
[0069]
[移动体监视系统11的动作]接着,参照图5说明本发明的实施方式所涉及的移动体监视系统11的动作。图5是表示在本发明实施方式所涉及的移动体监视系统11中,终端装置17(应答方)和监视装置19(请求方)各自依次进行的信息处理步骤的图。
[0070]
作为前提设定为,在移动体监视系统11中,在图1所示那样的t字路交叉路口5处的交通环境下,在请求提供与不明移动体13有关的不在时间信息的作为请求方的车载设备(在图1所示的例子中,车辆15g所具有的终端装置17g)、获取有关不明移动体13的不在时间信息并进行应答的作为应答方的车载设备(在图1所示的例子中,多台车辆的各车辆所具有的各终端装置)、和对这些各装置之间的信息交换进行协调的监视装置19(设置于路侧设备21)中,分别进行与不明移动体13有关的所需信息处理。
[0071]
在图5所示的步骤s11中,车辆15g所具有的作为请求方的终端装置17g(设置于车载设备31)经由终端侧通信部65和v2x通信设备45播放(广播发送)请求提供与不明移动体13有关的信息的提供请求信号。此外,搭载有作为请求方的终端装置17g的车辆15g在支线道路9的停止线10的近前处暂时停车。在图1所示的例子中,该车辆15g的驾驶员在等候向干线道路7中的右侧车道7a上的车辆15b与车辆15d之间的车间间隙16合流的机会。然而,可以省略步骤s11的由作为请求方的终端装置17g发送所述信息提供请求信号。
[0072]
在步骤s12中,接收到来自作为请求方的终端装置17g的信息提供请求信号的监视装置19,经由综合侧通信部91广播(广播发送)请求应答(回复)有关不明移动体13的不在时间信息的意思的信息应答请求信号。在该信息应答请求信号中,包含在作为应答方的终端装置中应获取不明移动体信息的指定时刻的信息。
[0073]
假设在应获取不明移动体信息的指定时刻存在1台不明移动体13的情况下,在没有指定应获取不明移动体信息的时刻的情况下,在以彼此不同的时刻获取到的不明移动体信息中,不明移动体13存在于与各时刻对应的彼此不同的位置。其结果,难以综合包含不明移动体信息的概念的有关不明移动体13的不在时间信息来确定不明移动体13。
[0074]
另外,假设在应获取不明移动体信息的指定时刻不存在不明移动体13的情况下,当没有指定应获取不明移动体信息的时刻时,监视装置19接收到在彼此不同的时刻获取到的有关不明移动体13的不在时间信息的应答。于是,在监视装置19中汇集了基于不在判定的时间点的时间信息(时刻信息)的时间段彼此不重叠的多个不在时间信息。在该情况下,即使想要根据对有关不明移动体13的
不在时间信息进行综合分析的结果来设定不明移动体13的不在信息的准确度,基于作出不在判定的时间点的时间信息(时刻信息)的时间段彼此重叠的不在时间信息的数量也不齐全。其结果,所述综合分析的结果难以有助于不明移动体13的不在信息的准确度的确定。
[0075]
此外,所述指定时刻被设定为相对于信息答复请求信号的发送时刻具有规定的延迟时间。这是因为,在作为应答方的终端装置迟时间。这是因为,在作为应答方的终端装置中为了在指定时刻可靠地获取不明移动体信息,需要规定的延迟时间(准备期间)。
[0076]
然而,在省略了步骤s11中作为请求方的终端装置17g进行的所述信息提供请求信号的发送的情况下,监视装置19例如也可以经由综合侧通信部91,按规定时间或根据通过路侧设备21所具有的外界传感器41掌握的t字路交叉路口5处的交通环境(尤其是在支线道路9的停车线10近前是否存在处于暂时停车状态下的车辆15),来广播(广播发送)请求应答有关不明移动体13的不在时间信息的信息应答请求信号。
[0077]
在步骤s13中,作为应答方的各终端装置在信息应答请求信号中所包含的指定时刻,获取包含不明移动体13的存在与否信息及位置信息的不明移动体信息。在本实施方式中,假设不明移动体13不在。接着,作为应答方的各终端装置生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在获取到的所述不明移动体13的不在信息中附加了作出不在判定的时间点的时间信息之后得到的信息。
[0078]
在步骤s14中,作为应答方的各终端装置经由终端侧通信部65和v2x通信设备45广播(广播发送)应答有关不明移动体13的不在时间信息的信息应答信号(参照图3所示的通信帧39)。
[0079]
在步骤s15中,接收到来自作为应答方的各终端装置在步骤s15中,接收到来自作为应答方的各终端装置的信息应答信号的监视装置19综合分析有关不明移动体13的不在时间信息。在有关不明移动体13的不在时间信息的综合分析中,对多个不在时间信息中基于作出不在判定的时间点的时间信息(时刻信息)的时间段彼此重叠的不在时间信息的应答数进行计数。同时,也对基于作出不在判定的时间点的时间信息(时刻信息)的时间段彼此不重叠的不在时间信息的应答数进行计数。
[0080]
在步骤s16中,监视装置19根据步骤s15的不在时间信息的综合分析结果,进行不明移动体13的不在判定。
[0081]
在步骤s17中,监视装置19根据步骤s15的不在时间信息的分析结果(多个不在时间信息中基于作出不在判定的时间点的时间信息(时刻信息)的时间段彼此重叠的不在时间信息的应答数),来设定不明移动体13的不在信息的准确度。在该情况下,例如,基于作出不在判定的时间点的时间信息的时间段彼此重叠的不在时间信息的应答数越多,不在信息的准确度越高(规定的不明移动体13在规定的时间段不在死角区域18中的盖然性越高),以此来确定不明移动体13的不在信息的准确度。
[0082]
另外,监视装置19也可以根据步骤s15中不在时间信息的综合分析结果(在多个不在时间信息中基于作出不在判定的时间点的时间信息的时间段彼此重叠的不在时间信息的应答数、以及基于作出不在判定的时间点的时间信息的时间段彼此不重叠的不在时间信息的应答数),来设定与不明移动体13有关的不在信息的准确度。在这种情况下,例如,基于作出不在判定的时间点的时间信息的时间段彼此重叠的不在时间信息的应答数越多,且基于作出不在判定的时间点的时间信息的时间段彼此重
叠的不在时间信息的应答数及所述时间段彼此不重叠的不在时间信息的应答数的总数越大,不在信息的准确度越高(规定的不明移动体13在规定的时间段不在死角区域18中的盖然性越高),以此来确定不明移动体13的不在信息的准确度。
[0083]
在步骤s18中,监视装置19经由综合侧通信部91广播(广播发送)信息提供信号,该信息提供信号提供包含不明移动体13的不在信息的准确度的与不明移动体13有关的信息。接收到来自路侧设备21的信息提供信号的作为请求方的终端装置17g根据与不明移动体13有关的信息来执行本车辆15g的驾驶辅助,例如在多功能显示器上显示与不明移动体13有关的信息等。
[0084]
〔本发明的实施方式涉及的移动体监视系统11和移动体监视方法的作用效果〕接着,对本发明的实施方式所涉及的移动体监视系统11和移动体监视方法的作用效果进行说明。基于(1)的观点的移动体监视系统11以设置有终端装置17和监视装置19的移动体监视系统11为前提,其中,监视装置19通过收集有关终端装置17周围的不明移动体13的信息来监视不明移动体13。终端装置17具有信息获取部61、终端侧判定部62、不在时间信息生成部63和终端侧通信部65,其中,所述信息获取部61获取包括不明移动体13存在与否的信息的不明移动体信息,所述终端侧判定部62进行与规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定,在由终端侧判定部62作出不明移动体13不在所述监视区域(死角区域18)的判定的情况下,所述不在时间信息生成部63生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在与该监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到的信息,所述终端侧通信部65发送生成的所述不在时间信息。另一方面,监视装置19具有综合侧通信部91和综合侧判定部93,其中,所述综合侧通信部91接收从终端侧通信部65发送来的不在时间信息,所述综合侧判定部93根据接收到的所述不在时间信息,作出在基于(作出不在判定的时间点的)时间信息的时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定。综合侧判定部93采用以下结构:根据接收到的所述不在时间信息中基于所述时间信息的时间段重叠的不在时间信息的数量,来设定所述不在信息的准确度。
[0085]
在基于(1)的观点的移动体监视系统11中,在终端装置17中,信息获取部61获取包括不明移动体13存在与否的信息的不明移动体信息。终端侧判定部62进行与规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定。在由终端侧判定部62作出了不明移动体13不在监视区域(死角区域18)的判定的情况下,不在时间信息生成部63生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在与监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到信息。终端侧通信部65发送生成的所述不在时间信息。另一方面,在监视装置19中,综合侧通信部91接收从终端侧通信部65发送来的不在时间信息。综合侧判定部93根据接收到的所述不在时间信息,作出在基于(作出不在判定的时间点的)时间信息的时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定。
尤其是,综合侧判定部93根据接收到的所述不在时间信息中基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量,来设定不在信息的准确度。在此,表述为“通过收集有关不明移动体13的信息来监视不明移动体13的监视装置19”是为了明确以下主旨,即,作为“监视装置19”的功能,不需要直接监视不明移动体13。但是,作为“监视装置19”的功能,也可以赋予直接监视不明移动体13的功能。“设定不在信息的准确度”的主旨为,取基于时间信息的时间段不重叠的不在时间信息的数量的值作为不在信息的准确度。终端装置17例如可以设置于具有通信功能的移动体(车辆15等),也可以设置于具有通信功能的路侧设备21。监视装置19与终端装置17同样,例如可以设置于具有通信功能的移动体(车辆15),也可以设置于具有通信功能的路侧设备21。
[0086]
根据基于(1)的观点的移动体监视系统11,综合通过通信获取到的与检测地点处的不明移动体13有关的不在信息来进行不明移动体13的监视,据此,能够显著提高与某观测地点的死角区域18中的不明移动体13有关的不在信息的准确度。
[0087]
基于(2)的观点的移动体监视系统11以具有多个终端装置17和一个监视装置19的移动体监视系统11为前提,其中,多个所述终端装置17设置在多个移动体(车辆15)的各移动体上,一个所述监视装置19通过收集多个有关移动体(车辆15)各自周围的不明移动体13的信息来监视不明移动体13。多个终端装置17分别具有信息获取部61、终端侧判定部62、不在时间信息生成部63和终端侧通信部65,其中,所述信息获取部61获取包括不明移动体13存在与否的信息的不明移动体信息,所述终端侧判定部62进行与规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定,在由终端侧判定部62作出了不明移动体13不在所述监视区域(死角区域18)的判定的情况下,所述不在时间信息生成部63生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在与该监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到的信息,所述终端侧通信部65发送生成的所述不在时间信息。另一方面,监视装置19具有综合侧通信部91和综合侧判定部93,其中,所述综合侧通信部91接收从多个终端侧通信部65分别发送来的多个不在时间信息,所述综合侧判定部93根据接收到的多个所述不在时间信息,作出在基于(作出不在判定的时间点的)时间信息的时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定。综合侧判定部93采用以下结构:根据接收到的多个所述不在时间信息中基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量,来设定不在信息的准确度。
[0088]
基于(1)的观点的移动体监视系统11与基于(2)的观点的移动体监视系统11的不同点在于,在后者(2)中,一个监视装置19与多个移动体(车辆15)分别具有的多个终端装置17建立对应关系。
[0089]
在基于(2)的观点的移动体监视系统11中,在多个移动体(车辆15)分别具有的多个终端装置17中,信息获取部61获取包括不明移动体13存在与否的信息的不明移动体信息。终端侧判定部62进行与规定的监视区域(死角区域18)有关的不明移动体13存在与否的
判定。不在时间信息生成部63在由终端侧判定部62作出了不明移动体13不在监视区域(死角区域18)中的判定的情况下,生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在与监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到的信息。终端侧通信部65发送生成的所述不在时间信息。另一方面,在监视装置19中,综合侧通信部91接收从多个终端侧通信部65分别发送来的多个不在时间信息。综合侧判定部93根据接收到的多个所述不在时间信息,作出在基于(作出不在判定的时间点的)时间信息的时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定。尤其是,综合侧判定部93根据接收到的多个所述不在时间信息中基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量,来设定不在信息的准确度。终端装置17与基于(1)的观点的移动体监视系统11的例子同样,例如可以设置在具有通信功能的移动体(车辆15)上,也可以设置在具有通信功能的路侧设备21上。监视装置19与基于(1)的观点的移动体监视系统11的例子同样,例如可以设置在具有通信功能的移动体(车辆15)上,也可以设置在具有通信功能的路侧设备21上。
[0090]
根据基于(2)的观点的移动体监视系统11,综合通过通信获取到的与在检测地点处的不明移动体13有关的不在信息来进行不明移动体13的监视,据此,能够显著提高与某观测地点的死角区域18中的不明移动体13有关的不在信息的准确度。
[0091]
在基于(2)的观点的移动体监视系统11中,监视装置19采用上位概念的结构,可以设置于具有通信功能的车辆15,也可以设置于具有通信功能的路侧设备21。
[0092]
与此相对,基于(3)的观点的移动体监视系统11为,在基于(2)的观点的移动体监视系统11中,如图6所示,采用以下结构:多个终端装置17分别设置于多台车辆15等移动体,另一方面,监视装置19被设置于车辆15等移动体,被设置于移动体的监视装置19的综合侧通信部91通过与分别设置于多个移动体的多个终端装置17之间进行通信,接收从多个各终端侧通信部65分别发送来的多个不在时间信息。
[0093]
作为设置于移动体(车辆15)的监视装置19,沿用图4所示的结构即可。但是,在采用图4所示的结构的监视装置19的情况下,外界传感器41可以沿用被搭载于移动体(车辆15)的外界传感器,并且gps接收部99可以沿用被搭载于移动体(车辆15)的导航装置43的gps接收部。
[0094]
基于(2)的观点的移动体监视系统11与基于(3)的观点的移动体监视系统11的不同点在于,在后者(3)中,监视装置19被设置于移动体(车辆15)。即,在基于(3)的观点的移动体监视系统11中,被设置于移动体(车辆15)的监视装置19的综合侧通信部91通过与分别设置于多个移动体(车辆15)的多个终端装置17之间进行通信,来接收从多个终端侧通信部65分别发送来的多个不在时间信息。
[0095]
根据基于(3)的观点的移动体监视系统11,综合通过与多个移动体(车辆15)之间的通信分别获取到的与在多个检测地点处的不明移动体13有关的不在信息来进行不明移动体13的监视,据此,能够显著提高与在某观测地点的死角区域18中的不明移动体13有关的不在信息的准确度。
[0096]
基于(4)的观点的移动体监视系统11为,在基于(3)的观点的移动体监视系统11中,监视装置19所具有的综合侧通信部91发送有关搭载有所述监视装置19的监视移动体(车辆15)的死角区域18的信息,另一方面,多个终端装置17分别具有的终端侧通信部65接收监视移动体(车辆15)的死角区域的信息。多个终端装置17分别具有的终端侧判定部62采用以下结构:将接收到的有关所述监视移动体(车辆15)的死角区域18设定为规定的监视区域,并且进行与设定的该规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定。
[0097]
在基于(4)的观点的移动体监视系统11中,监视装置19所具有的综合侧通信部91发送有关搭载有监视装置19的监视移动体(车辆15)的死角区域18的信息,另一方面,多个终端装置17分别具有的终端侧通信部65接收监视移动体(车辆15)的死角区域18的信息。多个终端装置17分别具有的终端侧判定部62将接收到的有关所述监视移动体(车辆15)的死角区域18设定为规定的监视区域,并且进行与设定的该规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定。
[0098]
根据基于(4)的观点的移动体监视系统11,监视装置19所具有的综合侧通信部91发送监视移动体(车辆15)的死角区域18的信息,另一方面,多个终端装置17分别具有的终端侧判定部62将从监视装置19所具有的综合侧通信部91发送来的监视移动体(车辆15)的死角区域18设定为规定的监视区域,并且进行与设定的该规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定,因此,与基于(3)的观点(将监视装置19设置在移动体(车辆15)上)的移动体监视系统11相比,在搭载有监视装置19的监视移动体(车辆15)中,即使在死角区域18的宽窄随着监视移动体(车辆15)的行驶而时刻变化的情况下,也能够进行与死角区域18的宽窄变化对应的不明移动体13存在与否的判定。其结果,即使在死角区域18的宽窄时刻变化的情况下,也能够适时且准确地获取死角区域18中的不明移动体13的不在信息。
[0099]
基于(5)的观点的移动体监视系统11为,在基于基于中的任一观点的移动体监视系统11中采用以下结构:监视装置19所具有的综合侧通信部91发送应在指定时刻获取不明移动体信息的请求,另一方面,多个终端装置17的各终端装置分别具有的信息获取部61在所述指定时刻获取不明移动体信息。
[0100]
在基于(5)的观点的移动体监视系统11中,监视装置19所具有的综合侧通信部91发送应在指定时刻获取不明移动体信息的请求,另一方面,多个终端装置17的各终端装置分别具有的信息获取部61在所述指定时刻获取不明移动体信息。
[0101]
根据基于(5)的观点的移动体监视系统11,监视装置19所具有的综合侧通信部91发送应在指定时刻获取不明移动体信息的请求,另一方面,多个终端装置17的各终端装置分别具有的信息获取部61在所述指定时刻获取不明移动体信息,因此,与基于中任一观点的移动体监视系统11相比,能够简单且准确地进行获取和生成作为不明移动体信息的下位概念的有关不明移动体13的不在时间信息的处理。
[0102]
基于(6)的观点的移动体监视系统11为,在基于(4)的观点的移动体监视系统11中,监视装置19所具有的综合侧判定部93采用以下结构:关于接收到的多个所述不在时间信息,根据在基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量上加上基于所述时间信息的时间段不重叠的不在时间信息的数量而得到的总数来设定
所述不在信息的准确度。
[0103]
在基于(6)的观点的移动体监视系统11中,关于接收到的多个所述不在时间信息,监视装置19所具有的综合侧判定部93根据在基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量上加上基于所述时间信息的时间段不重叠的不在时间信息的数量而得到的总数来设定所述不在信息的准确度。在此,在基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量上加上基于所述时间信息的时间段不重叠的不在时间信息的数量的总数,就是具有能向监视装置19提供与不明移动体13有关的不在信息的终端装置17的移动体(车辆15)的台数的信息(总体参数)。另外,不在信息的准确度是应进行统计处理的主题。这一点,在基于(6)的观点的移动体监视系统11中,在设定不在信息的准确度时,可以参考具有能够向监视装置19提供与不明移动体13有关的信息的终端装置17的移动体(车辆15)的台数的信息(总体参数)。
[0104]
根据基于(6)的观点的移动体监视系统11,在设定不在信息的准确度时,可以参考具有终端装置17的移动体(车辆15)的台数的信息(总体参数),其中,终端装置17能将与不明移动体13有关的信息提供给监视装置19,因此,与基于(4)的观点的移动体监视系统11相比,可以期待提高设定不在信息的准确度时的精度。
[0105]
另外,基于(7)的观点的移动体监视方法以在移动体监视系统11中使用的移动体监视方法为前提,该移动体监视系统11具有多个终端装置17和一个监视装置19,其中,多个终端装置17设置于多个移动体(车辆15)的各移动体上,一个所述监视装置19通过收集多个有关移动体(车辆15)各自周围的不明移动体13的信息来监视不明移动体13。多个终端装置17各自执行以下步骤:获取包括不明移动体13存在与否的信息的不明移动体信息;进行与规定的监视区域(死角区域18)有关的不明移动体13存在与否的判定;在通过所述存在与否的判定而作出不明移动体13不在所述监视区域(死角区域18)中的判定的情况下,生成有关不明移动体13的不在时间信息,该有关不明移动体13的不在时间信息是指在与该监视区域(死角区域18)有关的不明移动体13的不在信息中附加了作出该不在的判定的时间点的时间信息之后得到的信息;和发送生成的所述不在时间信息。另一方面,监视装置19执行以下步骤:接收从多个终端侧通信部65分别发送来的多个不在时间信息;根据接收到的多个所述不在时间信息,作出在基于(作出不在判定的时间点的)时间信息的规定时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定。在作出在规定的时间段中与监视区域(死角区域18)有关的不明移动体13不在的判定的步骤采用以下结构:综合侧判定部93根据接收到的多个所述不在时间信息中基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量,来设定不在信息的准确度。
[0106]
基于(7)的观点的移动体监视方法是将基于(2)的观点的移动体监视系统11的结构改写为方法技术方案而得到的。
[0107]
根据基于(7)的观点的移动体监视方法,与基于(2)的观点的移动体监视系统11同样,综合通过通信获取到的与检测地点处的不明移动体13有关的不在信息来进行不明移动体13的监视,据此,能够显著提高与在某观测地点的死角区域18中的不明移动体13有关的
不在信息的准确度。
[0108]
〔其他实施方式〕以上说明的多个实施方式表示本发明的具体化的例子。因此,本发明的技术范围不应被解释为受这些实施方式限制。这是因为本发明在不脱离其主旨或其主要特征的情况下能够以各种方式实施。
[0109]
例如,在本发明的实施方式所涉及的移动体监视系统11的说明中,作为设定不在信息的准确度时的算法,举出了准确度设定部97根据由综合侧通信部91接收到的多个不在时间信息中基于(作出不在判定的时间点的)时间信息的时间段重叠的不在时间信息的数量,来设定不在信息的准确度的例子进行了说明,但也可以采用除此之外的算法。
[0110]
最后,本发明还可以通过以下方式来实现:经由网络或存储介质向系统或设备提供用于实现上述实施方式所涉及的一个以上功能的程序,并且该系统或装置的计算机中的一个以上的处理器读取并执行该程序。另外,也可以通过实现1个以上功能的硬件电路(例如asic)来实现本发明。包括实现各功能的程序的信息能够被存储在存储器、硬盘等记录装置、存储卡、光盘等记录介质中。
[0111]
本发明以左侧行驶的情况为例进行了说明,但对于右侧行驶的情况也同样能够适用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。