1.本发明涉及计量测量领域,特别涉及一种基于物联网的测速仪现场检定系统。
背景技术:
2.测速仪现场测速误差检定方法是依据jjg527
‑
2015《固定式机动车雷达测速仪》检定规程、jjg528
‑
2015《移动式机动车雷达测速仪》检定规程、jjg1074
‑
2012《机动车激光测速仪》检定规程和jjg1122
‑
2015《机动车地感线圈测速系统》检定规程现场测速误差的检定部分两种方法:(1)在真实交通流量状态下以正常行驶的车辆作为被测对象,现场测速标准装置与被检测速仪同时对检测区域内的同一被测对象进行测量,记录30组有效测量值,计算出两者误差;(2)装有标准测速仪的试验车以被检速度值匀速行驶,标准测速仪测量并显示试验车通过检测区域时的速度值,同时测速仪对试验车进行测量,计算出两者误差。测速地点大多是装在容易出现交通事故的危险路段,在现场检定中要求检定方司机驾驶试验车以限速值100%匀速通过检测区域。
3.但是,上述两种方法均存在以下缺点:
4.(1)现场检定需要交警部门对检测区域进行封闭;
5.(2)对司机驾驶技术要求比较高;
6.(3)工作效率低、浪费社会资源;
7.(4)存在安全风险,在此检测区域高速行驶很容易引起交通事故造成现场检定人员伤亡。
技术实现要素:
8.(一)要解决的技术问题
9.为了解决现有技术的上述问题,本发明提供一种基于物联网的测速仪现场检定系统,能够提高测试仪现场检定的效率,且安全性和准确性高。
10.(二)技术方案
11.为了达到上述目的,本发明采用的技术方案为:
12.一种基于物联网的测速仪现场检定系统,包括无人驾驶汽车、被检测速仪和云平台;
13.所述无人驾驶汽车上设有主控制器,所述主控制器通过物联网与所述云平台进行通信;
14.所述被检测速仪安装于道路上,并通过物联网与所述云平台进行通信;
15.所述被检测速仪获取所述无人驾驶汽车在检测区域内行驶产生的第一数据,并发送至云平台;
16.所述主控制器获取所述无人驾驶汽车在检测区域内行驶产生的第二数据,并发送至云平台;
17.所述云平台根据所述第一数据和第二数据对被检测速仪进行现场误差检定。
18.(三)有益效果
19.本发明的有益效果在于:通过被检测速仪获取无人驾驶汽车在检测区域内行驶产生的第一数据,并发送至云平台;主控制器获取无人驾驶汽车在检测区域内行驶产生的第二数据,并发送至云平台;云平台根据第一数据和第二数据对被检测速仪进行现场误差检定,通过物联网连接实时分析交通路况,按检定规程要求以一定速度匀速通过检测区域。能够消除因为封闭检测区域给道路造成的拥堵,节约社会资源,另外通过无人驾驶汽车上和被检测速仪测得数据通过物联网连接上传至云平台进行自动分析计算得出现场测速误差,避免检定人员在现场可能会出现人员伤亡的危险性,还可以提高工作效率。
附图说明
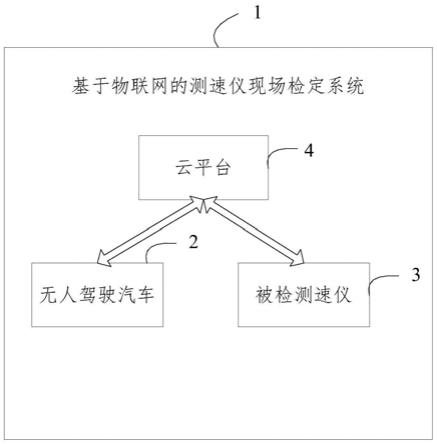
20.图1为本发明实施例的基于物联网的测速仪现场检定系统的整体结构示意图。
21.【附图标记说明】
22.1:基于物联网的测速仪现场检定系统;
23.2:无人驾驶汽车;
24.3:被检测速仪;
25.4:云平台。
具体实施方式
26.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
27.实施例一
28.请参照图1,一种基于物联网的测速仪现场检定系统1,包括无人驾驶汽车2、被检测速仪3和云平台4;
29.所述无人驾驶汽车2上设有主控制器,所述主控制器通过物联网与所述云平台4进行通信;
30.所述被检测速仪3安装于道路上,并通过物联网与所述云平台4进行通信;
31.所述被检测速仪3获取所述无人驾驶汽车2在检测区域内行驶产生的第一数据,并发送至云平台4;
32.所述主控制器获取所述无人驾驶汽车2在检测区域内行驶产生的第二数据,并发送至云平台4;
33.所述云平台4根据所述第一数据和第二数据对被检测速仪3进行现场误差检定。
34.所述第一数据包括图片信息和第一速度值;
35.所述图片信息包括第一车牌信息和第一时间信息;
36.所述第二数据包括第二车牌信息、第二时间信息和第二速度值。
37.所述被检测速仪3包括第一物联网通信模块;
38.所述被检测速仪3通过所述第一物联网通信模块将所述第一数据发送至云平台4。
39.所述无人驾驶汽车2上安装有标准测速仪、gnss模块和第二物联网通信模块;
40.所述标准测速仪、gnss模块和第二物联网通信模块分别与所述主控器电连接;
41.所述标准测速仪用于获取第二速度值;
42.所述gnss模块用于获取第二时间信息;
43.所述无人驾驶汽车2的主控器获取第二车牌信息、第二时间信息和第二速度值,并通过所述第二物联网通信模块发送至云平台4。
44.所述的所述云平台4根据所述第一数据和第二数据对被检测速仪3进行现场误差检定具体为:
45.判断所述第一车牌信息和第二车牌信息是否一致,若是,则执行下一步;
46.判断第一时间信息和第二时间信息的时间差是否小于预设值,若是,则根据所述第一速度值和第二速度值对被检测速仪3进行现场误差检定。
47.优选地,所述预设值为30秒,所述误差检定计算公式为:
48.δv=v
‑
v049.δv:表示被检测速仪3现场测速误差(km/h);
50.υ:表示第一速度值(km/h);
51.υ0:表示第二速度值(km/h)。
52.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种基于物联网的测速仪现场检定系统,其特征在于,包括无人驾驶汽车、被检测速仪和云平台;所述无人驾驶汽车上设有主控制器,所述主控制器通过物联网与所述云平台进行通信;所述被检测速仪安装于道路上,并通过物联网与所述云平台进行通信;所述被检测速仪获取所述无人驾驶汽车在检测区域内行驶产生的第一数据,并发送至云平台;所述主控制器获取所述无人驾驶汽车在检测区域内行驶产生的第二数据,并发送至云平台;所述云平台根据所述第一数据和第二数据对被检测速仪进行现场误差检定。2.根据权利要求1所述的基于物联网的测速仪现场检定系统,其特征在于,所述第一数据包括图片信息和第一速度值;所述图片信息包括第一车牌信息和第一时间信息;所述第二数据包括第二车牌信息、第二时间信息和第二速度值。3.根据权利要求1所述的基于物联网的测速仪现场检定系统,其特征在于,所述被检测速仪包括第一物联网通信模块;所述被检测速仪通过所述第一物联网通信模块将所述第一数据发送至云平台。4.根据权利要求1所述的基于物联网的测速仪现场检定系统,其特征在于,所述无人驾驶汽车上安装有标准测速仪、gnss模块和第二物联网通信模块;所述标准测速仪、gnss模块和第二物联网通信模块分别与所述主控器电连接;所述标准测速仪用于获取第二速度值;所述gnss模块用于获取第二时间信息;所述无人驾驶汽车的主控器获取第二车牌信息、第二时间信息和第二速度值,并通过所述第二物联网通信模块发送至云平台。5.根据权利要求2所述的基于物联网的测速仪现场检定系统,其特征在于,所述的所述云平台根据所述第一数据和第二数据对被检测速仪进行现场误差检定具体为:判断所述第一车牌信息和第二车牌信息是否一致,若是,则执行下一步;判断第一时间信息和第二时间信息的时间差是否小于预设值,若是,则根据所述第一速度值和第二速度值对被检测速仪进行现场误差检定。
技术总结
本发明提供的一种基于物联网的测速仪现场检定系统,通过被检测速仪获取无人驾驶汽车在检测区域内行驶产生的第一数据,并发送至云平台;主控制器获取无人驾驶汽车在检测区域内行驶产生的第二数据,并发送至云平台;云平台根据第一数据和第二数据对被检测速仪进行现场误差检定,通过物联网连接实时分析交通路况,按检定规程要求以一定速度匀速通过检测区域;能够消除因为封闭检测区域给道路造成的拥堵,节约社会资源,另外通过无人驾驶汽车上和被检测速仪测得数据通过物联网连接上传至云平台进行自动分析计算得出现场测速误差,避免检定人员在现场可能会出现人员伤亡的危险性,还可以提高工作效率。还可以提高工作效率。还可以提高工作效率。
技术研发人员:马兴 高建斌
受保护的技术使用者:福建省计量科学研究院(福建省眼镜质量检验站)
技术研发日:2021.06.18
技术公布日:2021/9/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。