1.本发明属于自主泊车技术领域,尤其涉及一种可记忆自主泊车的方法。
背景技术:
2.自主泊车系统是一种用于解决车辆从停车场入口到停车位之间的车辆自动驾驶的问题的一套控制系统。
3.传统的自主泊车系统建立停车场高精地图,以车载运算单元以及车载的传感器实现环境感知、路径避障、车位搜寻,从而实现自动巡航泊车。但停车场高精地图具备时效性,外界环境或用户使用习惯发生变化均会导致高精地图失效。
4.另外,自主泊车系统的安全性是首要条件,传统的自主泊车系统在自主泊车功能的启动、泊车类型与位置选择,均需用户动手操作,车辆驾驶过程中,易分散用户注意力,带来安全隐患;其次,频繁操作也大大影响用户体验,如何让用户以极简的操作选择期望的泊车位置,降低用户更新高精地图的频率,均是传统泊车系统所急需要解决的问题。
技术实现要素:
5.本发明实施例提供一种可记忆自主泊车的方法,旨在解决背景技术中提出的问题。
6.本发明实施例是这样实现的,一种可记忆自主泊车的方法,该方法包括如下步骤:
7.s1、建立停车场高精地图、记忆车位和记忆路线数据库;
8.s2、与所选停车场的停车场高精地图匹配;
9.s3、判断是否与所述停车场高精地图匹配成功,若是则执行s4,否则执行s2;
10.s4、向用户反馈是否泊入记忆车位信息,供用户选择是否泊入记忆车位,若是则执行s5,否则等待用户指令;
11.s5、结合车辆位置,按照记忆路线控制车辆自动巡航至记忆车位处;
12.s6、获取记忆车位周边图像信号,判断车位是否占用,若否则执行s7,是则执行s8;
13.s7、控制车辆自动泊入记忆车位,完成自主泊车;
14.s8、用户驾驶车辆,获取车辆周边图像信息,从图像信息中检测可泊车位;
15.s9、向用户推送可泊车位信息,供用户选择是否泊入可泊车位,若是则执行s10,否则执行s8;
16.s10、控制车辆泊入可泊车位;
17.s11、判断泊入车位是否为记忆车位,若是则泊车结束,否则执行s12;
18.s12、用户选择是否记忆可泊车位,若是则执行s13,否则结束泊车;
19.s13、记忆可泊车位及泊入路线,将可泊车位及泊入路线分别作为记忆车位和记忆路线存入数据库。
20.优选的,所述停车场高精地图包括语义数据和slam点云数据。
21.优选的,所述与停车场高精地图匹配通过获取车辆周边图像信息,提取车辆周边
图像信息中的语义信息和slam点云数据与所述停车场高精地图内的语义数据和slam点云数据进行比对,获取车辆位置,判断车辆位置是否处于记忆路线上。
22.优选的,所述s10中,可由用户驾驶或车辆自主泊车模块控制车辆驶入所述可泊车位。
23.优选的,所述车辆自动巡航至记忆车位处和所述车辆自动泊入记忆车位通过环境感知模块获取车辆周边图像信息识别车辆周边障碍物进行自主巡航避障。
24.优选的,所述环境感知模块为车载传感器,包括车载摄象头和车载超声系统。
25.优选的,所述车辆自主泊车模块根据车辆和所述可泊车位的位置,结合车辆周边图像信息进行自主巡航避障规划车辆泊入所述可泊车位的泊入路径,并按照泊入路径控制车辆泊入所述可泊车位。
26.该自主泊车的方法操简单,实现方便,可有效的避免用户在车辆移动状态下的操作频率,从而保证自主泊车的安全性。
附图说明
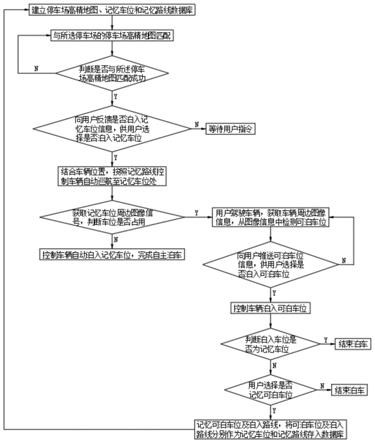
27.图1是一种可记忆自主泊车的方法的结构示意图。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
29.本发明提供一种可记忆自主泊车的方法,如图1所示,该方法包括如下步骤:
30.s1、建立停车场高精地图、记忆车位和记忆路线数据库;
31.其中,所述停车场高精地图包括语义数据和slam点云数据;
32.s2、与所选停车场的停车场高精地图匹配;
33.s3、判断是否与所述停车场高精地图匹配成功,若是则执行s4,否则执行s2;
34.其中,所述与停车场高精地图匹配通过获取车辆周边图像信息,提取车辆周边图像信息中的语义信息和slam点云数据与所述停车场高精地图内的语义数据和slam点云数据进行比对,获取车辆位置,判断车辆位置是否处于记忆路线上;
35.s4、向用户反馈是否泊入记忆车位信息,供用户选择是否泊入记忆车位,若是则执行s5,否则等待用户指令;
36.s5、结合车辆位置,按照记忆路线控制车辆自动巡航至记忆车位处;
37.s6、获取记忆车位周边图像信号,判断车位是否占用,若否则执行s7,是则执行s8;
38.s7、控制车辆自动泊入记忆车位,完成自主泊车;
39.其中,所述车辆自动巡航至记忆车位处和所述车辆自动泊入记忆车位通过环境感知模块获取车辆周边图像信息识别车辆周边障碍物进行自主巡航避障;
40.所述环境感知模块为车载传感器,包括车载摄象头和车载超声系统;
41.所述车辆自主泊车模块根据车辆和所述可泊车位的位置,结合车辆周边图像信息进行自主巡航避障规划车辆泊入所述可泊车位的泊入路径,并按照泊入路径控制车辆泊入所述可泊车位;
42.s8、用户驾驶车辆,获取车辆周边图像信息,从图像信息中检测可泊车位;
43.s9、向用户推送可泊车位信息,供用户选择是否泊入可泊车位,若是则执行s10,否则执行s8;
44.s10、由用户驾驶或车辆自主泊车模块控制车辆泊入可泊车位;
45.s11、判断泊入车位是否为记忆车位,若是则泊车结束,否则执行s12;
46.s12、用户选择是否记忆可泊车位,若是则执行s13,否则结束泊车;
47.s13、记忆可泊车位及泊入路线,将可泊车位及泊入路线分别作为记忆车位和记忆路线存入数据库。
48.该方法通过建立数据库存储停车场高精地图,并记录记忆车位和泊入记忆车位的记忆路线,当车辆进入停车场地图范围时,自动与停车场高精地图匹配,匹配成功后,获取车辆位置及记忆路线,结合车辆位置和记忆路线控制车辆自动驾驶巡航至记忆车位处,并通过环境感知模块获取车辆周边图像信息,从车辆周边图像信息内提取记忆车位的状态,在记忆车位未被占用的情况下自动控制车辆泊入记忆车位内;若记忆车位被占用,则由人工驾驶控制车辆移动,通过环境感知模块探测车辆周边可泊车位,并向用户推送可泊车位信息,控制车辆泊入可泊车位后,选择是否记忆该可泊车位以及泊车路线,用户选择记忆可泊车位后将车位位置及泊车路线存入数据库以备后续泊车使用,该自主泊车的方法可有效的避免用户在车辆移动状态下的操作频率,从而保证自主泊车的安全性。
49.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种可记忆自主泊车的方法,其特征在于,所述方法包括如下步骤:s1、建立停车场高精地图、记忆车位和记忆路线数据库;s2、与所选停车场的停车场高精地图匹配;s3、判断是否与所述停车场高精地图匹配成功,若是则执行s4,否则执行s2;s4、向用户反馈是否泊入记忆车位信息,供用户选择是否泊入记忆车位,若是则执行s5,否则等待用户指令;s5、结合车辆位置,按照记忆路线控制车辆自动巡航至记忆车位处;s6、获取记忆车位周边图像信号,判断车位是否占用,若否则执行s7,是则执行s8;s7、控制车辆自动泊入记忆车位,完成自主泊车;s8、用户驾驶车辆,获取车辆周边图像信息,从图像信息中检测可泊车位;s9、向用户推送可泊车位信息,供用户选择是否泊入可泊车位,若是则执行s10,否则执行s8;s10、控制车辆泊入可泊车位;s11、判断泊入车位是否为记忆车位,若是则泊车结束,否则执行s12;s12、用户选择是否记忆可泊车位,若是则执行s13,否则结束泊车;s13、记忆可泊车位及泊入路线,将可泊车位及泊入路线分别作为记忆车位和记忆路线存入数据库。2.如权利要求1所述的可记忆自主泊车的方法,其特征在于,所述停车场高精地图包括语义数据和slam点云数据。3.如权利要求2所述的可记忆自主泊车的方法,其特征在于,所述与停车场高精地图匹配通过获取车辆周边图像信息,提取车辆周边图像信息中的语义信息和slam点云数据与所述停车场高精地图内的语义数据和slam点云数据进行比对,获取车辆位置,判断车辆位置是否处于记忆路线上。4.如权利要求3所述的可记忆自主泊车的方法,其特征在于,所述s10中,可由用户驾驶或车辆自主泊车模块控制车辆驶入所述可泊车位。5.如权利要求4所述的可记忆自主泊车的方法,其特征在于,所述车辆自动巡航至记忆车位处和所述车辆自动泊入记忆车位通过环境感知模块获取车辆周边图像信息识别车辆周边障碍物进行自主巡航避障。6.如权利要求5所述的可记忆自主泊车的方法,其特征在于,所述环境感知模块为车载传感器,包括车载摄象头和车载超声系统。7.如权利要求5所述的可记忆自主泊车的方法,其特征在于,所述车辆自主泊车模块根据车辆和所述可泊车位的位置,结合车辆周边图像信息进行自主巡航避障规划车辆泊入所述可泊车位的泊入路径,并按照泊入路径控制车辆泊入所述可泊车位。
技术总结
本发明提供了一种可记忆自主泊车的方法,属于自主泊车领域,建立数据库存储停车场高精地图,记录记忆车位和泊入记忆车位的记忆路线,当车辆进入停车场地图范围时,自动匹配停车场高精地图,获取车辆位置及记忆路线,控制车辆自动驾驶巡航至记忆车位处,判断记忆车位的状态,在车位未占用的情况下控制车辆泊入记忆车位内;若车位被占用,则由人工驾驶控制车辆移动,自动探测车辆周边可泊车位,并向用户推送,控制车辆泊入可泊车位后,选择是否记忆该可泊车位以及泊车路线,选择记忆可泊车位后将车位位置及泊车路线存入数据库以备后续泊车使用,该自主泊车的方法可有效的避免用户在车辆移动状态下的操作频率,从而保证自主泊车的安全性。的安全性。的安全性。
技术研发人员:张祎 马光林 蒋如意 于萌萌 田钧
受保护的技术使用者:上海追势科技有限公司
技术研发日:2021.05.29
技术公布日:2021/10/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。