1.本实用新型涉及一种智能机器人,特别是涉及一种全自动多角度定点踢球机器人。
背景技术:
2.随着机器人技术的不断进步,各种机器人出现在大众的视野中,机器人体育竞技比赛的发展更是成为了机器人中的一项不可缺少的赛事。fira国际机器人足球联合会和robotcup国际机器人足球世界杯赛等机器人足球赛事组织先后成立让足球机器人体育竞技得到了很好的发展。在第19届robocon全国大学生机器人大赛中出现了一种踢橄榄球机器人,与传统的规则球类相比橄榄球的特殊形状也决定了其机器人的特殊结构。
3.在人类的橄榄球竞技比赛中,大多数都是接到球后需要在短时间内完成任务,机器人竞技延续其竞技规则也应具有这样的功能。现有的踢球机器人的移动速度和踢球距离在很大程度上受到限制。本实用新型旨在解决上述问题,提高踢球机器人的移动速度和踢球距离。
技术实现要素:
4.为解决现有技术的不足,本实用新型提供一种全自动多角度定点踢球机器人,能够真正实现人机互动,可有效提高踢球机器人的移动速度和踢球距离。所述技术方案如下:
5.一种全自动多角度定点踢球机器人,包括底盘、捡放球机构、踢球机构、球座、行走机构、传感系统、定位系统、控制器,行走机构安装在底盘底部,踢球机构和捡放球机构安装在底盘上,捡放球机构安装在踢球机构的前部,球座放置在捡放球机构的下部,行走机构包括舵轮、舵轮转向驱动器、舵轮位置检测器、舵轮驱动电机,控制器根据定位系统的位置指令驱动舵轮驱动电机和舵轮转向驱动器来驱动舵轮,使机器人到达指定位置;踢球机构包括踢球机构保持架、踢球脚、踢球电机,踢球脚在踢球电机的驱动下绕着踢球机构保持架前后摆动,做出踢球的动作;捡放球机构包括球姿态矫正结构、球座姿态矫正结构、捡放球驱动机构、姿态矫正驱动机构,姿态矫正驱动机构驱动球姿态矫正结构和球座姿态矫正结构向中间合拢或向两边散开,捡放球驱动机构驱动球姿态矫正结构和球座姿态矫正结构上升或下降;传感系统设置在球座上,检测到球座上有球时,控制器控制姿态矫正驱动机构,驱动球姿态矫正结构和球座姿态矫正结构向中间合拢夹住球座和球,控制器控制捡放球驱动机构,驱动球姿态矫正结构和球座姿态矫正结构上升,带动球和球座上升,控制器控制舵轮到达指定位置后,控制器控制捡放球驱动机构和姿态矫正驱动机构,驱动球姿态矫正结构和球座姿态矫正结构下降并向两侧散开,控制器控制踢球电机,驱动踢球脚将球以一定的角度踢出。
6.优选地,捡放球驱动机构为捡放球气缸,姿态矫正驱动机构为姿态矫正气缸。
7.优选地,捡放球机构还包括捡放球气缸固定角铝、圆卡片、升降玻纤、导轮、上下连接玻纤、姿态矫正气缸固定角铝、上下矫正连接结构、捡放球滑块、捡放球滑动角铝、姿态矫
正滑块、姿态矫正滑轨、球姿态矫正玻纤,捡放球气缸固定角铝将捡放球气缸固定在踢球机构保持架,圆卡片与捡放球气缸连接,带动升降玻纤上下移动,姿态矫正气缸带动球姿态矫正结构向中间合拢或向两边散开,导轮设置在球姿态矫正结构的周边,辅助对球姿态进行矫正,上下连接玻纤连接球姿态矫正结构和捡放球滑动角铝,姿态矫正气缸固定角铝将姿态矫正气缸固定在底盘上,上下矫正连接结构连接球姿态矫正结构和球座姿态矫正结构,捡放球滑块上下滑动,与球姿态矫正结构和球座姿态矫正结构配合实现捡球和放球,捡放球滑动角铝连接球座姿态矫正结构和捡放球滑块,带动球座姿态矫正结构上下移动,姿态矫正滑块连接球座姿态矫正结构和底盘,姿态矫正滑轨与姿态矫正滑块配合,限制球姿态矫正结构和球座姿态矫正结构的运动轨迹,球姿态矫正玻纤固定姿态矫正气缸并控制姿态矫正的调节程度。
8.优选地,捡放球机构还包括垫高尼龙柱,调节姿态矫正气缸的高度。
9.优选地,行走机构还包括电机转轴座、电机定轴座、走线架、胶轮、轮毂、轴承,电机转轴座和电机定轴座将舵轮驱动电机固定在底盘上,走线架固定舵轮上的线,胶轮与轮毂配合使用,承载底盘,轴承连接轮毂和电机转轴座。
10.优选地,行走机构还包括磁环和磁编码器,磁环固定在舵轮驱动电机上,与磁编码器配合使用来记录电机角度。
11.优选地,舵轮位置检测器为霍尔开关。
12.优选地,轮毂为铝制轮毂。
13.优选地,踢球机构还包括编码器、磁铁座、霍尔开关,编码器与踢球电机配合来监测电机角度,磁铁座和霍尔开关配合使用来确定踢球机构的初始位置。
14.优选地,还包括车身角度记录系统,检测机器人的整体转角并反馈给控制器。
15.优选地,底盘为玻璃纤维底盘。
16.本实用新型提供的技术方案带来的有益效果是:本实用新型的全自动多角度定点踢球机器人设置有带舵轮的底盘,能够真正实现人机互动,提高踢球机器人的移动速度和车体稳定性,通过对踢球机构的仿生设计,提高踢球机器人的踢球距离和命中率,可用于橄榄球或足球运动的训练或测试。
附图说明
17.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
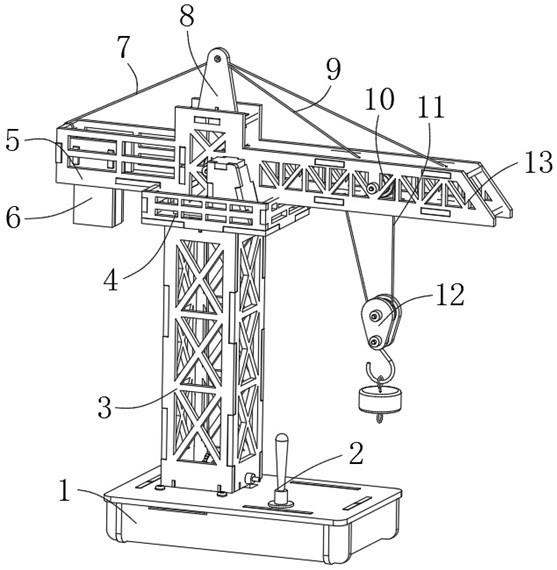
18.图1是本实用新型所述的全自动多角度定点踢球机器人的示意图。
19.图2是本实用新型所述的全自动多角度定点踢球机器人的舵轮结构的分解示意图。
20.图3是本实用新型所述的全自动多角度定点踢球机器人的舵轮的剖视示意图。
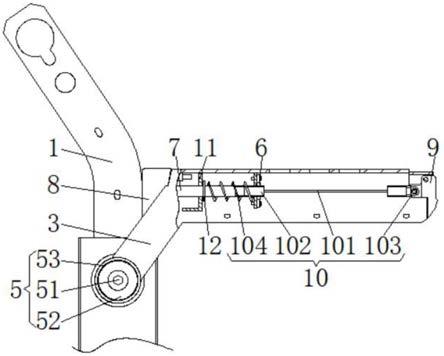
21.图4是本实用新型所述的全自动多角度定点踢球机器人的捡放球及姿态矫正机构的示意图。
22.图5是本实用新型所述的全自动多角度定点踢球机器人的踢球机构的示意图。
23.图中的附图标记分别表示:
24.1、底盘,2、舵轮转向驱动器,3、舵轮,4、舵轮位置检测器,7、踢球机构,8、全场定位系统,9、球座,10、捡放球机构,11、球调整机构,12、车身角度记录系统,31、走线架,32、胶轮,33、轮毂,34、电机转轴座,35、轴承,36、磁环,37、磁编码器,38、舵轮驱动电机,39、电机定轴座、41、捡放球气缸,42、捡放球气缸固定角铝,43、圆卡片,44、升降玻纤,45、球姿态矫正结构,46、导轮,47、上下连接玻纤,48、姿态矫正气缸,49、姿态矫正气缸固定角铝,60、上下矫正连接结构,61、捡放球滑块,62、捡放球滑动角铝,63、球座姿态矫正结构,64、姿态矫正滑块,65、姿态矫正滑轨,66、球姿态矫正玻纤,67、垫高尼龙柱,51、踢球机构保持架,52、踢球脚,53、编码器,54、踢球电机,55、磁铁座,56、霍尔开关。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地详细描述。
26.如图1
‑
5所示,本实用新型的全自动多角度定点踢球机器人,包括底盘1、捡放球机构10、踢球机构7、球座9、行走机构、传感系统、定位系统、控制器。为了减轻机器人重量,优选地,底盘1和捡放球机构10使用玻璃纤维制成。底盘1连接机器人各结构,实现机器人的整体移动。行走机构安装在底盘1底部。踢球机构7和捡放球机构10安装在底盘1上。捡放球机构10安装在踢球机构7的前部。球座9放置在捡放球机构10的下部,用于盛放橄榄球或足球,球座9的形状设计成能够与橄榄球或足球的形状相匹配的形状,以便球能稳定地放在球座9上。全场定位系统8固定在玻璃纤维底盘上,用于记录机器人的相对位置定位。球座的零件。底盘1上还设置有车身角度记录系统12,用于检测机器人的整体转角,反馈给控制器。
27.优选地,行走机构包括四个独立驱动的舵轮。行走机构包括四个舵轮3、四个舵轮转向驱动器2、四个舵轮位置检测器4、四个舵轮驱动电机38。优选地,舵轮位置检测器4为普通霍尔开关,用于踢球机器人启动时,确定四个舵轮3的初始位置。控制器根据定位系统的位置指令驱动舵轮驱动电机38和舵轮转向驱动器2,从而驱动舵轮3,通过控制四个舵轮3的转速和转向,控制踢球机器人到达指定位置。如图2
‑
3所示,行走机构还包括电机转轴座34、电机定轴座39、走线架31、胶轮32、轮毂33、轴承35。电机转轴座34和电机定轴座39将舵轮驱动电机38固定在底盘1上,走线架31固定舵轮3上的线,防止舵轮旋转时电源线和can控制线与轮毂33干涉造成线路损坏。胶轮32与轮毂33配合使用来承载底盘1。胶轮32上的胶皮是一种硬度为30的硅胶轮,起到减震作用。为减轻重量,轮毂33为铝制轮毂。轴承35连接轮毂33和电机转轴座34。优选地,轴承35为深沟球轴承。优选地,行走机构还包括磁环36和磁编码器37,磁环36固定在舵轮驱动电机38上,与磁编码器37配合使用来记录电机所转角度。优选地,舵轮驱动电机38选用t
‑
motor u10 plus电机。
28.如图5所示,踢球机构7包括踢球机构保持架51、踢球脚52、踢球电机54。踢球机构保持架51将踢球机构7固定在玻璃纤维底盘上。踢球脚52采用仿生设计,模拟人的腿和脚。踢球脚52在踢球电机54的驱动下绕着踢球机构保持架51前后摆动,做出踢球的动作。优选地,踢球机构7还包括编码器53、磁铁座55、霍尔开关56。编码器53与踢球电机54配合来监测电机角度,编码器53为绝对值式编码器。磁铁座55和霍尔开关56配合使用来确定踢球机构的初始位置,霍尔开关56可以检测磁铁并给控制器反馈信号。优选地,踢球电机54可以选用
maxon ec30电机。
29.如图4所示,捡放球机构10包括球姿态矫正结构45、球座姿态矫正结构63、捡放球驱动机构41、姿态矫正驱动机构48。姿态矫正驱动机构48驱动球姿态矫正结构45和球座姿态矫正结构63向中间合拢或向两边散开。捡放球驱动机构41驱动球姿态矫正结构45和球座姿态矫正结构63上升或下降。传感系统设置在球座9上,检测到球座9上有球时,控制器控制姿态矫正驱动机构48,驱动球姿态矫正结构45和球座姿态矫正结构63向中间合拢夹住球座和球,控制器控制捡放球驱动机构41,驱动球姿态矫正结构45和球座姿态矫正结构63上升,带动球和球座9上升,控制器控制舵轮3到达指定位置后,控制器控制捡放球驱动机构41和姿态矫正驱动机构48,驱动球姿态矫正结构45和球座姿态矫正结构63下降并向两侧散开,控制器控制踢球电机54,驱动踢球脚52将球以一定的角度踢出。
30.优选地,捡放球驱动机构41为捡放球气缸41,姿态矫正驱动机构48为姿态矫正气缸48。驱动机构41和48也可采用其他驱动设备,例如电动机。
31.优选地,捡放球机构10还包括捡放球气缸固定角铝42、圆卡片43、升降玻纤44、导轮46、上下连接玻纤47、姿态矫正气缸固定角铝49、上下矫正连接结构60、捡放球滑块61、捡放球滑动角铝62、姿态矫正滑块64、姿态矫正滑轨65、球姿态矫正玻纤66。捡放球气缸固定角铝42将捡放球气缸41固定在踢球机构保持架51上。圆卡片43与捡放球气缸41连接,带动升降玻纤44上下移动。姿态矫正气缸48带动球姿态矫正结构45向中间合拢或向两边散开,对球的姿态进行矫正。导轮46设置在球姿态矫正结构45的周边,辅助对球姿态进行矫正。上下连接玻纤47连接球姿态矫正结构45和捡放球滑动角铝62,姿态矫正气缸固定角铝49将姿态矫正气缸48固定在底盘1上。上下矫正连接结构60连接球姿态矫正结构45和球座姿态矫正结构63。捡放球滑块61上下滑动,与球姿态矫正结构45和球座姿态矫正结构63配合实现捡球和放球。捡放球滑动角铝62连接球座姿态矫正结构63和捡放球滑块61,带动球座姿态矫正结构63上下移动。姿态矫正滑块64连接球座姿态矫正结构63和底盘1,姿态矫正滑轨65与姿态矫正滑块64配合,限制球姿态矫正结构45和球座姿态矫正结构63的运动轨迹,保护驱动气缸。球姿态矫正玻纤66固定姿态矫正气缸48并控制姿态矫正的调节程度。优选地,捡放球机构10还包括垫高尼龙柱67,调节姿态矫正气缸48的高度。捡放球机构10设计成可以合拢和散开的两部分,每部分结构与要踢的橄榄球或足球的外形相配合,便于两部分合拢式正好固定抱住球,为了减轻重量,捡放球机构10可以采用玻璃纤维制作。优选地,在捡放球机构10的周边设置若干个导轮,便于对球的姿态进行矫正。
32.本实用新型的全自动多角度定点踢球机器人的运行原理如下。启动机器人后,机器人通过全场定位系统8进行初始位置定位记录。踢球电机54驱动踢球脚52调整至初始位置,磁铁座55和霍尔开关56配合确定踢球机构的初始位置,并给控制器反馈信号。操作人员将球座9放置在图1所示的位置上,并触发红外测距模块,姿态矫正驱动机构48驱动球座姿态矫正结构63向中间合拢,对球座姿态矫正。操作人员将橄榄球竖直放置球座9上端,此时红外测距模块触发,机器人收到橄榄球已经放好的信息,操作人员随后触发红外测距模块,两个姿态矫正驱动气缸48同时前推,球座姿态矫正结构63将球座9夹持,球姿态矫正结构45和导轮46共同矫正橄榄球姿态,完成矫正动作,增大放球容错率,踢球更精准。紧接着,捡放球气缸41回拉,通过升降玻纤44,利用捡放球滑块61限位,将整套姿态矫正机构抬起,至此完成捡球。捡起球后,机器人在舵轮转向驱动器2和舵轮3的配合下,移动机器人。利用全场
定位系统8移动到指定位置。在即将到达指定位置的同时,通过车身角度记录系统12的数据和程序设定角度,对机器人的踢球角度进行调整。到达指定位置后,捡放球机构10将球座9和球放下。捡放球气缸41前推,通过升降玻纤44,利用捡放球滑块61限位,将整套姿态矫正机构下降,球座9触底。两个姿态矫正驱动气缸48同时通过节流阀缓慢后拉,将球和球座9平稳放下执行踢球动作。与此同时,踢球机构7中的踢球脚52在踢球电机54的驱动下,绕着踢球机构保持架51从后往前摆动,将球踢出。利用编码器53对踢球电机54的转角进行监测,进而控制踢球脚52的力度,实现定点踢球。完成踢球动作后,机器人会夹持球座9,对球座9重复利用,踢球机构7也会回至初始位置,并等待操作人员下个指令。机器人装有高精度传感器,可收集数据并反馈给控制器,随时精确调整机器人的运动。
33.本实用新型的全自动多角度定点踢球机器人可以解决目前市场上只有微型踢球机器人的问题和不足,弥补橄榄球机器人的空缺,能够真正实现人机互动,可用于橄榄球运动的训练以及性能测试,可以加快机器人高智能化的发展。
34.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。