1.本发明属于核安全设备技术领域,具体涉及一种乏燃料组件运输容器加速度监测系统及方法。
背景技术:
2.放射性物质的运输若发生泄漏,会造成大量人员伤亡、财产损失,留下几十年无法消除的后患,因此放射性物质运输的安全性显得尤为重要。未辐照燃料组件运输容器是未辐照燃料组件制造和运输过程中必须具备的重要设备,随着我国民用核领域技术的快速发展,未辐照燃料组件的运输数量和品种不断增加,因此,为了安全可靠地将未辐照燃料组件运输到工作现场,在运输过程中必须保证组件结构的稳定性和安全性,需要对运输过程运输容器的状态进行监控。
3.根据我国核燃料供应企业布局,运输距离均为上千公里计,运输距离长,同时在实际的运输过程中,往往通过专用铁路线和公路运输相结合的方式进行燃料组件的运输。目前常采用的运输容器监测方法是在核燃料组件容器上固定有加速度传感装置,当容器所遭受加速度超过特定值时,其可以指示加速度值已超限,可提示对核燃料组件的安全性进行检查。由于加速度传感装置具有较强的温度敏感性,温度变化容易引起加速度传感装置的测量精度,从而造成一定的测量误差,影响了用户对燃料组件的监控。
技术实现要素:
4.本发明目的在于提供一种乏燃料组件运输容器加速度监测系统,解决了现有技术中温度变化引起加速度传感装置的测量精度变化,从而造成一定的测量误差问题。
5.为了实现上述目的,本发明采用以下技术方案:一种乏燃料组件运输容器加速度监测系统,包括:
6.加速度检测装置,用于获取运输容器的检测加速度;
7.训练样本获取单元,用于获取bp神经网络的训练样本,所述训练样本包括加速度检测装置在不同训练温度下测得的训练加速度值;
8.零偏曲线获取单元,用于根据bp神经网络算法对训练样本进行曲线拟合,获得加速度检测装置随温度变化的零偏曲线;
9.第一温度补偿单元,用于根据零偏曲线获得加速度检测装置的零偏值,并基于第一温度补偿模型,获得第一补偿加速度。
10.作为本发明的一种可选方案,所述第一温度补偿模型的表达式为:
11.a1=k(m
‑
o0)
12.其中,a1为第一补偿加速度,k为加速度值的标度因子,m为检测加速度,o0为加速度检测装置的零偏值。
13.作为本发明的一种可选方案,还包括控制器,所述控制器与加速度检测装置连接,控制器连接有远端报警器,控制器用于将加速度检测装置所得到的检测加速度与设定的报
警阈值进行比较,并在检测加速度大于报警阈值时控制远端报警器发出警报。
14.作为本发明的一种可选方案,所述控制器连接有第二温度补偿单元,所述第二温度补偿单元利用第二温度补偿模型对检测加速度进行温度补偿获得第二补偿加速度,控制器根据第二补偿加速度控制远端报警器发出警报;所述第二温度补偿模型的表达式为:
15.a2=k*m
‑
b0*t
16.其中,a2为第二补偿加速度,k为加速度值的标度因子,m为检测加速度,b0为加速度检测装置的零偏系数,t为加速度检测装置的环境温度值。
17.作为本发明的一种可选方案,所述加速度检测装置包括三轴加速度传感器,所述三轴加速度传感器外设有防辐射外壳,所述防辐射外壳内设有与控制器连接的气压传感器,防辐射外壳开设有通气孔;所述通气孔设有弯折部,所述通气孔呈s形。
18.作为本发明的一种可选方案,所述加速度检测装置还包括测量板,所述三轴加速度传感器设置在测量板上,所述防辐射外壳内部设有与所述测量板适配的安装槽。
19.作为本发明的一种可选方案,所述防辐射外壳包括壳体,所述壳体顶部可拆卸连接有顶板,壳体的一侧设有开口,所述开口设有防护盖板;所述防护盖板采用铅玻璃制成,所述壳体和顶板均采用不锈钢制成;所述壳体内部设有隔板,所述隔板的两侧分别设有第一安装腔和第二安装腔,所述第一安装腔与所述开口连通,第一安装腔内设置控制器,所述第二安装腔内设有供电装置,所述供电装置与控制器连接;所述供电装置包括供电电池和备用电池,所述供电电池和备用电池均与控制器连接。
20.作为本发明的一种可选方案,所述控制器连接有陀螺仪、温度传感器和湿度传感器;所述控制器包括控制板,所述控制板上设有mcu,所述mcu连接有指示灯、第一接口和第二接口,所述第一接口与所述远端报警器连接,所述第二接口连接pc机,所述pc机与第一温度补偿单元连接。
21.本发明的另一个目的在于提供一种乏燃料组件运输容器加速度监测方法,包括以下步骤:
22.获取bp神经网络的训练样本,所述训练样本包括加速度检测装置在不同训练温度下测得的训练加速度值;
23.根据bp神经网络算法对训练样本进行曲线拟合,获得加速度检测装置随温度变化的零偏曲线;
24.根据零偏曲线获得加速度检测装置的零偏值,并基于第一温度补偿模型,获得第一补偿加速度。
25.作为本发明的一种可选方案,获取bp神经网络的训练样本包括:设置温箱的温度曲线,采集加速度检测装置在x、y和z轴的加速度样本数据,获得bp神经网络的训练样本。
26.作为本发明的一种可选方案,所述第一温度补偿模型的表达式包括:
27.a1=k(m
‑
o0)
28.其中,a1为温度补偿后的第一补偿加速度,k加速度值的标度因子,m为检测加速度,o0为加速度检测装置的零偏值。
29.作为本发明的一种可选方案,对训练样本进行曲线拟合包括:
30.计bp神经网络正向传播的函数为f,通过正向传播的计算,得到零漂的估算值
定义bp神经网络的损失函数为平方根l
mse
,并通过如下公式计算:
[0031][0032]
通过随机梯度下降法(sgd)对损失函数进行方向传播优化,得到加速度检测装置随温度变化的零偏曲线。
[0033]
作为本发明的一种可选方案,所述加速度监测方法还包括:
[0034]
基于第二温度补偿模型对加速度检测装置的检测加速度进行温度补偿获得第二补偿加速度,对第二补偿加速度与设定的报警阈值进行比较并发出警报;所述第二温度补偿模型的表达式为:
[0035]
a2=k*m
‑
b0*t
[0036]
其中,a2为第二补偿加速度,k为加速度值的标度因子,m为检测加速度,b0为加速度检测装置的零偏系数,t为加速度检测装置的环境温度值。
[0037]
本发明的有益效果为:
[0038]
本发明提供了一种乏燃料组件运输容器加速度监测系统及方法,针对温度对加速度的影响,采用bp神经网络算法来建立加速度的温度误差补偿模型,综合考虑温度对零点漂移、灵敏度、重复性等参数的影响,进行温度修正补偿,经过修正补偿减少加速度随温度变化而带来的误差,为后续处理提供准确的参数值,提高加速度的精度,保证用户能够对燃料组件进行正常监控。
附图说明
[0039]
图1是本发明具体实施方式的控制框图;
[0040]
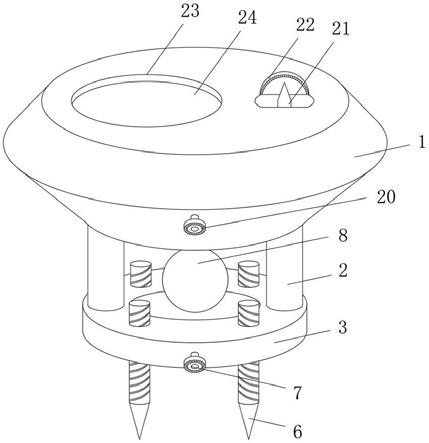
图2是本发明具体实施方式的结构示意图;
[0041]
图3是本发明具体实施方式中防辐射外壳的结构示意图;
[0042]
图4是本发明具体实施方式中零漂和温度采样结果图;
[0043]
图5是本发明具体实施方式中拟合的零偏曲线图;
[0044]
图6是本发明具体实施方式的工作流程图;
[0045]1‑
三轴加速度传感器;2
‑
气压传感器;3
‑
通气孔;4
‑
测量板;5
‑
安装槽;6
‑
壳体;7
‑
顶板;8
‑
防护盖板;9
‑
隔板;10
‑
陀螺仪;11
‑
温度传感器;12
‑
湿度传感器;13
‑
控制板;14
‑
mcu;15
‑
第一接口;16
‑
第二接口;17
‑
供电电池;18
‑
备用电池。
具体实施方式
[0046]
实施例
[0047]
如图1
‑
图6所示,本实施例提供了一种乏燃料组件运输容器加速度监测系统,包括:
[0048]
加速度检测装置,加速度检测装置安装在运输容器上,其用于获取运输容器的检测加速度。
[0049]
训练样本获取单元,用于获取bp神经网络的训练样本,所述训练样本包括加速度检测装置在不同训练温度下测得的训练加速度值,具体包括以下过程:设置温箱的温度曲线,将加速度检测装置放置到温箱中,采集加速度检测装置在x、y和z轴的加速度样本数据,
获得bp神经网络的训练样本。
[0050]
零偏曲线获取单元,用于根据bp神经网络算法对训练样本进行曲线拟合,获得加速度检测装置随温度变化的x、y和z轴的零偏曲线,具体包括以下过程:
[0051]
通过对加速度检测装置采样得到n组零漂和温度数据,零漂为温度为bp神经网络结构共包含四层,其中输入层和输出层分别包含一个神经元,隐藏层一共两层,分别包含10个神经元。计bp神经网络正向传播的函数为f,通过正向传播的计算,得到零漂的估算值定义bp神经网络的损失函数为平方根(lmse),并通过如下公式计算:
[0052][0053]
通过随机梯度下降法(sgd)对损失函数进行方向传播优化,得到加速度检测装置随温度变化的x、y和z轴的零偏曲线。
[0054]
下面展示本实施例中零漂与温度的曲线拟合结果,选用了同一种类型的加速度检测装置,采样不同温度下x轴的加速度零偏值,在多组采样数据中选取了向上变化最大的曲线、向下变化最大的曲线以及变化最小的曲线的零漂和温度的样本,每一组参数的样本个数为10个,样本如表1所示。
[0055]
表1加速度检测装置在x轴采样的零漂
[0056][0057][0058]
对x轴零漂样本进行散点图绘制,具体如图3所示,通过bp神经网络温度补偿算法拟合后的曲线如图4所示。
[0059]
第一温度补偿单元,用于根据零偏曲线获得加速度检测装置的零偏值,并基于第一温度补偿模型,获得第一补偿加速度。所述第一温度补偿模型的表达式为:
[0060]
a1=k(m
‑
o0)
[0061]
其中,a1为第一补偿加速度,k为加速度值的标度因子,m为检测加速度,o0为加速度检测装置的零偏值。通过第一温度补偿模型,分别计算出加速度检测装置在x、y和z轴的第一补偿加速度。
[0062]
本发明针对温度对加速度的影响,采用bp神经网络算法来建立加速度的温度误差补偿模型,综合考虑温度对零点漂移、灵敏度、重复性等参数的影响,进行温度修正补偿,经
过修正补偿减少加速度随温度变化而带来的误差,为后续处理提供准确的参数值,提高加速度的精度,保证用户能够对燃料组件进行正常监控。
[0063]
在一些实施方式中,该监测系统还包括控制器,所述控制器与加速度检测装置连接,控制器对加速度检测装置采样,控制器连接有远端报警器,控制器用于根据加速度检测装置所得到的检测加速度,与设定的报警阈值进行比较,当检测加速度大于设定报警阈值时,控制器控制远端报警器发出警报。
[0064]
优选地,所述控制器连接有第二温度补偿单元,所述第二温度补偿单元利用第二温度补偿模型对检测加速度进行温度补偿获得第二补偿加速度,控制器将第二补偿加速度与设定的报警阈值进行比较,当第二补偿加速度大于设定报警阈值时,控制器控制远端报警器发出警报,以便通知用户。控制器通过第二温度补偿单元,以便获得加速度更加准确的数据。
[0065]
进一步地,所述第二温度补偿模型的表达式为:
[0066]
a2=k*m
‑
b0*t
[0067]
其中,a2为第二补偿加速度,k为加速度值的标度因子,m为检测加速度,b0为加速度检测装置的零偏系数,t为加速度检测装置的环境温度值。
[0068]
由于加速度检测装置的零漂值并非随零偏系数线性变化,采用零偏系数进行温度补偿仅能粗略补偿温度漂移,不能做到精确计算,因此此处的温度补偿后的第二补偿加速度仅用于报警使用,满足对运输容器的初步监测报警。
[0069]
如图2所示,在一些实施方式中,所述加速度检测装置包括三轴加速度传感器1,所述三轴加速度传感器1外设有防辐射外壳,所述防辐射外壳内设有与控制器连接的气压传感器2,防辐射外壳开设有通气孔3;所述通气孔3设有弯折部,所述通气孔3呈s形。
[0070]
防辐射外壳的整体尺寸约为110mm(长)
×
80mm(宽)
×
75mm(高),控制器和三轴加速度传感器1均设置在防辐射外壳内部,其能够得到有效的防护,避免了其辐射受损,增加了其使用寿命。所述三轴加速度传感器1安装在防辐射外壳的内壁,且三轴加速度传感器1与控制器连接。防辐射外壳安装在运输容器上,三轴加速度传感器1能够检测x轴、y轴和z轴方向的加速度,并反馈至控制器,可实现对核燃料组件的加速度实时监测。
[0071]
三轴加速度传感器1是监测系统测量的核心,需选用精度高、技术成熟的芯片来实现其功能的测量。本发明的三轴加速度传感器1选用adi公司的adxl357,其主要技术指标见表2。
[0072]
表2三轴加速度传感器1主要技术指标
[0073]
[0074][0075]
在一些实施方式中,所述加速度检测装置还包括测量板4,所述三轴加速度传感器1设置在测量板4上,所述防辐射外壳内部设有与所述测量板4适配的安装槽5。测量板4采用两个内六角螺钉压紧安装到安装槽5中,保证三轴加速度传感器1固定可靠。
[0076]
如图1所示,在一些实施方式中,所述控制器连接有陀螺仪10、温度传感器11和湿度传感器12;所述控制器包括控制板13,所述控制板13上设有mcu14,所述mcu14连接有指示灯、第一接口15和第二接口16,所述第一接口15与所述远端报警器连接,所述第二接口16连接pc机,所述pc机与第一温度补偿单元连接。
[0077]
mcu14是仪器测量的重要元件,需选用功能齐全、运算速度快、技术成熟的芯片来实现数据的采集和处理。三轴加速度传感器1实时对运输容器的加速度进行采样并传输至mcu14,mcu14利用第二温度补偿单元获得第二补偿加速度,mcu14将第二补偿加速度与设定的报警阈值比较,大于设定报警阈值,进行存储(当前时间、三轴加速度、温度、湿度、压力),驱动远端报警器工作,并在适当的时候响应计算机的命令等操作。本发明选用st公司的stm32f103vct6,其主要技术指标见表3。
[0078]
表3 mcu14主要技术指标
[0079][0080][0081]
mcu14连接有数据存储器,数据存储器选用atmel公司的at45db161d,其主要技术指标见表4。
[0082]
表4数据存储器主要技术指标
[0083]
序号项目技术指标1容量16mbit;每页512byte2寿命100000次(写入)
3接口spi4耗电7ma(最大频率下读写模式);25ua(静态)5供电2.7~3.6v
[0084]
陀螺仪10需选用精度高、技术成熟的芯片来实现其功能的测量,本发明选用invensense公司的icm
‑
20689,其主要技术指标见表5。
[0085]
表5陀螺仪10主要技术指标
[0086]
序号项目技术指标1传感轴6轴(3轴陀螺仪 3轴加速度计)2量程
±
250
°
/s(3轴)3灵敏度131lsb/(
°
/s)4非线性
±
0.1%5adcs16位6通讯接口spi和i2c7电源1.71~3.45v
[0087]
温度传感器11选用maxim公司的ds1631z,其主要技术指标见表6。
[0088]
表6温度传感器11主要技术指标
[0089][0090][0091]
湿度传感器12选用humirel公司的htu21,其主要技术指标见表7。
[0092]
表7湿度传感器12主要技术指标
[0093]
序号项目技术指标1测量精度
±
2%rh2量程0~100%rh3数据输出12bit数据4接口i2c5耗电500ua(测量模式)6供电1.8~3.6v
[0094]
如图3所示,在一些实施方式中,所述防辐射外壳包括壳体6,所述壳体6顶部可拆卸连接有顶板7,壳体6的一侧设有开口,所述开口设有防护盖板8。顶板7和防护盖板8采用螺钉与壳体6连接,便于对壳体6内部的控制器、供电装置和三轴加速度传感器1进行维护。
[0095]
优选地,所述防护盖板8采用铅玻璃制成,所述壳体6和顶板7均采用不锈钢制成。壳体6的底部设有底板,底板采用10mm不锈钢板,壳体6四周采用2mm的不锈钢板,防护盖板8采用3mm的铅玻璃板,其防辐射效果较好,有效的提高了监测系统的使用寿命。
[0096]
所述壳体6内部设有隔板9,所述隔板9的两侧分别设有第一安装腔和第二安装腔,所述第一安装腔内设置控制器,且第一安装腔与所述开口连通,所述第二安装腔内设有供电装置,所述供电装置与控制器连接。隔板9采用不锈钢板,控制器和供电装置通过隔板9进行隔离,避免其相互影响,而且维护方便。
[0097]
所述供电装置包括供电电池17和备用电池18,所述供电电池17和备用电池18均与控制器连接。供电电池17的电源基准选用ti公司的lm4040a25i电压基准,考虑到控制器统一使用3.3v作为供电电压,而供电电池17采用1.5v并联电池作为供电电源,故需要对其进行升压到3.3v。升压芯片选用ti公司tps61025,其主要技术指标见表8。
[0098]
表8 dc/dc升压芯片主要技术指标
[0099]
序号项目技术指标1电压输入0.9v至6.5v2输出3.3v/1500ma(max)3效率典型值为96%4静态电流25μa
[0100]
供电电池17容量计算公式如下:
[0101][0102]
q
‑‑
所需配置电池容量(安时);
[0103]
p
‑‑
负载功率(瓦);t
‑‑
日用电小时数;
[0104]
u
‑‑
标准电池电压;k1
‑‑
放电控制系数(取0.75~0.8)
[0105]
mcu14(arm)耗电:12.8ma@16mhz
[0106]
三轴加速度传感器1耗电:200ua
[0107]
陀螺仪10耗电:4.5ma
[0108]
数据存储器耗电:0.3ma(1%的时间在写入数据)
[0109]
气压传感器2耗电:12ua
[0110]
温度传感器11耗电:1ma
[0111]
湿度传感器12耗电:0.5ma
[0112]
供电电池17基准耗电:60ua
[0113]
耗电总计:小于19ma,以19ma计,电压按照仪器最低可以工作的电压3v计算,则:q=19*24*20/(0.75*3)=4053mah。
[0114]
考虑到电路工作需要升压,升压效率取dc
‑
dc变换综合效率的低值50%,可以得到实际配置电池容量q1:q1=q/0.5=8106mah。再考虑到可能对外接指示灯供电,因此,供电电池17选择4节d型锂电池,单节d型锂电池容量10000mah,标称电压1.5v;备用电池18采用cr1220纽扣电池,为rtc供电,保证在4节d型锂电池掉电的情况下时钟正常工作。
[0115]
本发明根据乏燃料组件的结构及装载未辐照组件的辐照剂量,结合加速度监测要求,设计监测系统的机械结构和电气布局,实现对加速度的可靠检测,同时增加防辐射外壳屏蔽性设计,满足监测系统的耐辐照性,避免了其辐射受损,增加了其使用寿命。本发明应用在乏燃料组件运输容器上,根据监测系统的功能要求,设计了上述的结构和电路,包括三轴加速度传感器1、陀螺仪10、温度传感器11、湿度传感12和供电电池17等设计,在功能可靠
的同时综合考虑了监测系统的可维修性和可维护性,使得监测系统易于维护。
[0116]
本发明的乏燃料组件运输容器加速度监测系统主要用于运输和装卸过程中记录产生的各种冲击和震动加速度值,仪器由电子测量和机械结构两部分组成。电子测量部分主要负责测量并记录运输装卸过程中三轴向冲击加速度数据和环境状态数据(温度、湿度和大气压力),给出相应的报警指示;机械结构部分则将电池组与电子测量部分组合起来,形成仪器产品,具备机械安装接口,同时具备防辐射功能。工作时通过pc机系统软件激活,完成工作后用pc机系统软件读取数据进行分析及关闭,该系统具有以下设计特点:
[0117]
(1)加速度检测装置体积小、重量轻,易于固定;
[0118]
(2)人性化设计,指示清楚明晰,可提供指示接口定制功能,便于驾驶员根据情况及时调整驾驶方式;
[0119]
(3)关键部件的选型采用被广泛使用,性能满足技术要求,设备工作稳定;
[0120]
(4)提供软件激活、关闭功能和便捷的数据转存功能,方便事前管理和事后分析。
[0121]
(5)提供软件测试功能和配置功能,方便管理。
[0122]
如图6所示,本实施例还提供了一种乏燃料组件运输容器加速度监测方法,应用于上述的监测系统中,其包括以下步骤:
[0123]
通过训练样本获取单元获取bp神经网络的训练样本,所述训练样本包括在不同训练温度下测得的训练加速度值;其中,获取bp神经网络的训练样本包括:设置温箱的温度曲线,采集加速度检测装置在x、y和z轴的加速度样本数据,获得bp神经网络的训练样本。
[0124]
零偏曲线获取单元根据bp神经网络算法对训练样本进行曲线拟合,获得加速度检测装置随温度变化的零偏曲线;具体包括以下过程:通过对加速度检测装置采样得到n组零漂和温度数据,零漂为温度为bp神经网络结构共包含四层,其中输入层和输出层分别包含一个神经元,隐藏层一共两层,分别包含10个神经元。计bp神经网络正向传播的函数为f,通过正向传播的计算,得到零漂的估算值定义bp神经网络的损失函数为平方根(l
mse
),并通过如下公式计算:
[0125][0126]
通过随机梯度下降法(sgd)对损失函数进行方向传播优化,得到加速度检测装置随温度变化的x、y和z轴零偏曲线。
[0127]
第一温度补偿单元根据零偏曲线获得加速度检测装置的零偏值,并基于第一温度补偿模型,获得第一补偿加速度。所述第一温度补偿模型的表达式包括:
[0128]
a1=k(m
‑
o0)
[0129]
其中,a1为温度补偿后的第一补偿加速度,k加速度值的标度因子,m为检测加速度,o0为加速度检测装置的零偏值。
[0130]
基于第二温度补偿模型对加速度检测装置的检测加速度进行温度补偿获得第二补偿加速度,对第二补偿加速度与设定的报警阈值进行比较,第二补偿加速度大于报警阈值时系统发出警报;所述第二温度补偿模型的表达式为:
[0131]
a2=k*m
‑
b0*t
[0132]
其中,a2为第二补偿加速度,k为加速度值的标度因子,m为检测加速度,b0为加速度检测装置的零偏系数,t为加速度检测装置的环境温度值。
[0133]
本发明以乏燃料组件运输容器为监控对象,构建智能健康监测系统,采集节点信号,对各种状态信号进行状态监测,对采集信号进行分析的基础上,采取bp神经网络方法处理数据,并对运输容器当前的状态进行监测评估,实现系统的状态监测和预警功能。
[0134]
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征数量。术语“多个”的含义是两个以上,除非另有明确具体的限定。术语“安装”、“相连”、“连接”、“固定”等应做广义理解,可以是固定连接,可拆卸连接,或成一体;可以是机械连接或电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对本领域技术人员而言,可以理解上述术语在本发明中的具体含义。此外,实施例描述的具体特征、结构、材料或者特点包含于至少一个实施例中,在不相互矛盾的情况下,本领域技术人员可以将不同实施例的特征进行组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。