1.本发明涉及计算机制图的3d建模技术领域,具体涉及一种基于数字孪生模型的公路隧道运行状态仿真模拟方法。
背景技术:
2.在公路隧道安全运营工作中,隧道内的实际运行情况尤为重要,可以第一时间反映出隧道的安全隐患,往往利用这些情况来衡量隧道的安全状态。然而现有技术大多还停留在监测数据展示层面,无法直观地反映隧道实际运行情况,且无法真实地反映隧道内的运行状态。因此,现在亟需一种可以直观地、真实地反映隧道内运行状况的技术。
技术实现要素:
3.针对现有技术存在的不足,本发明提出一种基于数字孪生模型的公路隧道运行状态仿真模拟方法,可以真实地、直观地反映隧道内的实时运行状态。
4.第一方面,提供了一种基于数字孪生模型的公路隧道运行状态仿真模拟方法,包括:
5.根据相应的土建结构数据构建公路隧道的隧道虚拟场景;
6.采集公路隧道内物理设备的实时数据进行数据处理,得到反映物理设备状态的状态数据,以及反映隧道运行状态的场景特征量数据;
7.通过状态数据预测相应物理设备的维护时间,并根据场景特征量数据在所述隧道虚拟场景中创建相应的数字孪生模型,该数字孪生模型随所述场景特征量数据的变化进行模型演化;
8.判定是否达到物理设备的维护时间,响应于达到维护时间,重新根据场景特征量数据在所述隧道虚拟场景中创建相应的数字孪生模型。
9.结合第一方面,在第一方面的第一种可实现方式中,构建所述隧道虚拟场景包括:
10.根据公路隧道的土建结构数据将隧道划分为多个区段隧道,并确定每个区段隧道的土建结构数据和衔接点;
11.通过相应的土建结构数据构建各个区段隧道的衔接三维模型,并确定各个区段隧道之间的衔接点坐标;
12.根据衔接点坐标衔接各个区段隧道的衔接三维模型得到的隧道虚拟场景。
13.结合第一方面的第一种可实现方式,在第一方面的第二种可实现方式中,构建所述衔接三维模型包括:
14.在区段隧道的首尾衔接处分别创建与路线垂直的三维坐标系;
15.基于三维坐标系,根据土建结构数据构建区段隧道的结构轮廓,并确定区段隧道的衔接点坐标;
16.根据相应的结构轮廓和路线构建区段隧道的三维模型;
17.基于相应的三维模型创建区段隧道的实心三维模型;
18.根据衔接点坐标对各个区段隧道的实心三维模型进行布尔差集运算,得到相应的衔接三维模型。
19.结合第一方面的第一种可实现方式,在第一方面的第三种可实现方式中,还包括:
20.将区段隧道的衔接三维模型封装成衔接三维组件;
21.选取各个区段隧道相应的衔接三维组件,根据衔接点坐标衔接组成所述隧道虚拟场景。
22.结合第一方面,在第一方面的第四种可实现方式中,对实时数据进行处理包括:对实时数据进行降噪、异常值剔除以及缺失数据补偿。
23.结合第一方面,在第一方面的第五种可实现方式中,预测所述物理设备的维护时间,包括:
24.根据状态数据确定物理设备当前的退化状态;
25.确定相应测试设备处于所述退化状态时的状态测量值,以及测试设备出现故障的故障时间;
26.通过所述状态数据和状态测量值计算物理设备与测试设备之间的相似性参数;
27.根据所述相似性参数和故障时间预测物理设备的维护时间;
28.通过置信函数理论对所述物理设备的维护时间进行修正。
29.结合第一方面,在第一方面的第六种可实现方式中,在隧道虚拟场景中创建相应的数字孪生模型,包括:
30.根据物理设备的场景特征量数据构建不同形态的数字孪生模型;
31.定义不同形态的数字孪生模型与物理设备的场景特征量数据之间的数据接口;
32.获取物理设备实时的场景特征量数据,并通过数据接口匹配相应形态的数字孪生模型装配到隧道虚拟场景中。
33.结合第一方面的第六种可实现方式,在第一方面的第七种可实现方式中,还包括:
34.定义不同形态的数字孪生模型与物理设备的状态数据之间的数据接口;
35.获取物理设备实时的状态数据,并通过数据接口匹配相应形态的数字孪生模型装配到隧道虚拟场景中。
36.第二方面,提供了一种存储介质,存储有计算机程序,该计算机程序运行时,执行第一方面、第一方面的第一至七种可实现方式中的任意一种基于数字孪生模型的公路隧道运行状态仿真模拟方法。
37.有益效果:采用本发明的基于数字孪生模型的公路隧道运行状态仿真模拟方法,对隧道设备、交通、环境等真实运行状态进行分析,建立隧道虚拟场景与隧道内的物理设备的实时数据映射匹配模型,实现隧道虚拟场景中的数字孪生模型与隧道内的实际运营场景的实时数字映射,从而实时直观地、真实地反映隧道内的运行状态。
附图说明
38.为了更清楚地说明本发明具体实施方式,下面将对具体实施方式中所需要使用的附图作简单地介绍。在所有附图中,各元件或部分并不一定按照实际的比例绘制。
39.图1为本发明一实施例提供的模拟方法的流程图;
40.图2为构建隧道虚拟场景的流程图;
41.图3为构建区段隧道的衔接三维模型的流程图
42.图4为预测物理设备的维护时间的流程图。
具体实施方式
43.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
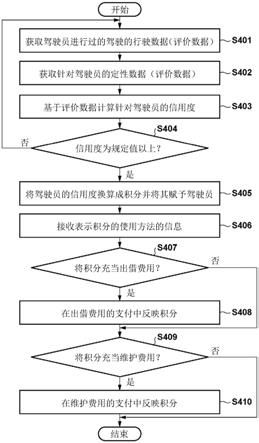
44.如图1所示的基于数字孪生模型的公路隧道运行状态仿真模拟方法的流程图,该模拟方法包括:
45.步骤1、根据相应的土建结构数据构建公路隧道的隧道虚拟场景;
46.步骤2、采集公路隧道内物理设备的实时数据进行数据处理,得到反映物理设备状态的状态数据,以及反映隧道运行状态的场景特征量数据;
47.步骤3、通过状态数据预测相应物理设备的维护时间,并根据场景特征量数据在所述隧道虚拟场景中创建相应的数字孪生模型,该数字孪生模型随所述场景特征量数据的变化进行模型演化;
48.步骤4、判定是否达到物理设备的维护时间,响应于达到维护时间,重新根据场景特征量数据在所述隧道虚拟场景中创建相应的数字孪生模型。具体而言:
49.首先,可以根据公路隧道的土建结构数据在显示隧道运行状态的展示平台中构建隧道虚拟场景,该土建结构数据可以是公路隧道的二维平面图。
50.然后,展示平台可以通过物联网与公路隧道内的物理设备通信连接,通过物理设备可以实时采集隧道内的监测数据和设备的运行状态数据。比如,通过微波车检器监测交通信息,通过亮度检测仪监测亮度值数据,通过co/vi检测器监测隧道内的一氧化碳浓度和能见度。展示平台可以对实时数据进行处理,从而得到反映物理设备运行状态的状态数据,对监测数据进行处理可以得到反映隧道内的运行状态的场景特征量数据。
51.之后,展示平台可以根据场景特征量数据,创建相应的虚拟三维模型,比如,通过微波车检器的场景特征量数据构建全类型车辆三维模型,根据亮度检测仪的的场景特征量数据构建多天气场景三维模型,根据co/vi检测器的场景特征量数据构建多形态烟雾三维模型。通过定义这些虚拟三维模型与相应物理设备的场景特征量数据之间的数据接口,可以构建起相应物理设备的数字孪生模型。如此,展示平台采集到实时的监测数据后,可以通过数据处理得到相应的实时场景特征量数据,并通过数据接口匹配相应的虚拟三维模型,再将匹配的虚拟三维模型装配到隧道虚拟场景,建立隧道虚拟场景与隧道内的物理设备的实时数据映射匹配模型,实现隧道虚拟场景中的数字孪生模型与隧道内的实际运营场景的实时数字映射,从而实时直观地、真实地反映隧道内的运行状态。
52.另外,展示平台还可以通过实时的状态数据预测物理设备的维护时间,即物理设备出现故障的时间。展示平台可以通过维护时间可以判定物理设备是否需要进行维护,如果不需要,则展示平台可以对物理设备对应的数字孪生模型不进行更新。如果需要对物理设备进行维护,展示平台可以在维护完成后,通过维护后的物理设备的监测数据重新构建相应的数字孪生模型,减小因设备维修、更换后造成的监测数据变化带来的影响,从而真实地反映隧道内的运行状态。
53.在本实施例中,优选的,如图2所示,构建所述隧道虚拟场景包括:
54.步骤1
‑
1、根据公路隧道的土建结构数据将隧道划分为多个区段隧道,并确定每个区段隧道的土建结构数据和衔接点;
55.步骤1
‑
2、通过相应的土建结构数据构建各个区段隧道的衔接三维模型,并确定各个区段隧道之间的衔接点坐标;
56.步骤1
‑
3、根据衔接点坐标衔接各个区段隧道的衔接三维模型得到的隧道虚拟场景。具体而言:
57.首先,可以根据土建结构数据对公路隧道进行分段,将隧道划分成多个区段隧道,土建结构数据中包括隧道的衬砌类型,可以根据衬砌类型对公路隧道进行分段。比如,可以将隧道划分成主洞、人行横洞、车行横洞等。通过公路隧道的土建结构数据可以确定各个区段隧道相应的土建结构数据和彼此之间的衔接点的位置。
58.之后,可以根据相应的土建结构数据构建各个区段隧道的衔接三维模型。在构建各个区段隧道的衔接三维模型时,由于部分区段隧道可能呈现一种衬砌类型,构建起的衔接三维模型可复用,所以可以将构建好的衔接三维模型存储在隧道模型组件库,在使用时,可以根据隧道虚拟场景需求,直接从隧道模型组件库中调取各个区段隧道对应的衔接三维模型。如此可以有效减少建模工作量,加快模型构建效率。
59.最后,可以通过各个区段隧道之间的衔接点坐标将这些三维模型衔接起来,构建起完整的公路隧道的隧道三维模型,无需担忧运行场景的兼容性。
60.在本实施例中,优选的,如图3所示,构建所述衔接三维模型包括:
61.步骤1
‑2‑
1、在区段隧道的首尾衔接处分别创建与路线垂直的三维坐标系;
62.步骤1
‑2‑
2、基于三维坐标系,根据土建结构数据构建区段隧道的结构轮廓,并确定区段隧道的衔接点坐标;
63.步骤1
‑2‑
3、根据相应的结构轮廓和路线构建区段隧道的三维模型;
64.步骤1
‑2‑
4、基于相应的三维模型创建区段隧道的实心三维模型;
65.步骤1
‑2‑
5、根据衔接点坐标对各个区段隧道的实心三维模型进行布尔差集运算,得到相应的衔接三维模型,具体而言:
66.首先,可以在区段隧道沿路线的首尾衔接处创建坐标系,使区段隧道之间的坐标相关联,在衔接时不需经过换算不同区段隧道之间的坐标,方便快速将各个区段隧道的三维模型衔接组合在一起。
67.然后,基于三维坐标系,可以根据区段隧道对应的土建结构数据构建起结构轮廓,之后,通过结构轮廓构建起区段隧道的三维模型,再基于各个区段隧道的三维模型,采用3ds max软件构建好各个区段隧道的实心三维模型,比如主洞、车行横洞、人行横洞和紧急停车带等的实心三维模型。
68.最后,根据主洞、车行横洞、人行横洞和紧急停车带等之间的衔接点坐标将这些区段隧道的实心三维模型衔接起来,利用车行横洞、人行横洞和紧急停车带的实心三维模型对主洞的实心三维模型进行布尔差集运算,得到主洞对应的包括衔接点的衔接三维模型。利用主洞实心三维模型对车行横洞、人行横洞三维模型等进行布尔差集运算,得到与车行横洞、人行横洞等对应的包括有衔接点的衔接三维模型。
69.在本实施例中,优选的,还包括:
70.将区段隧道的衔接三维模型封装成衔接三维组件;
71.选取各个区段隧道相应的衔接三维组件,根据衔接点坐标衔接组成所述隧道虚拟场景。有利于模型复用及更新优化,并根据公路隧道的物理场景快速组装成一个完整的隧道虚拟场景。
72.在本实施例中,优选的,对实时数据进行处理包括:对实时数据进行降噪、异常值剔除以及缺失数据补偿。
73.对实时数据进行处理时,首先,可以采用小波降噪方法对含噪声数据进行小波变换,通过变换得到的小波系数去除实时数据中包含的噪声,对处理后的小波系数进行小波逆转换得到降噪后的数据,从而提高数据的可靠性。然后,剔除降噪处理过程中的的异常数据,并对数据按时间进行顺序排列,以得到适合进行后续工作的数据。最后,对缺失的数据进行补偿,补偿方式可以根据数据所在位置的不同,分为首末数据补偿和中间数据补偿,首末数据补偿即针对在开始或末端存在缺失的数据,根据其趋势性对其进行补偿,而中间数据补偿采用多项式插值方法实现,以保证数据的完整性。
74.在本实施例中,优选的,如图4所示,预测所述物理设备的维护时间,包括:
75.步骤3
‑1‑
1、根据状态数据确定物理设备当前的退化状态;
76.步骤3
‑1‑
2、确定相应测试设备处于所述退化状态时的状态测量值,以及测试设备出现故障的故障时间;
77.步骤3
‑1‑
3、通过所述状态数据和状态测量值计算物理设备与测试设备之间的相似性参数;
78.步骤3
‑1‑
4、根据所述相似性参数和故障时间预测物理设备的维护时间;
79.步骤3
‑1‑
5、通过置信函数理论对所述物理设备的维护时间进行修正。具体而言:
80.在本实施例中,可以采用模糊相似方法预测物理设备剩余使用寿命,即预测物理设备的维护时间,并将置信函数理论用于不确定性处理。置信函数理论可以在状态数据很少的情况下,尽可能地消除利用模糊相似理论预测使用寿命的不确定性,具体步骤为:
81.首先,因为每种退化状态分别会对应相应的状态数据,所以可以通过物理设备当前的状态数据,确定物理设备当前处于何种退化状态。
82.然后,可以通过测试设备的历史试验数据确定测试设备处于所述退化状态时的状态测量值,以及测试设备处于所述退化状态后出现故障的时间。通过故障时间和当前时间可以计算出测试设备的剩余使用寿命rul
r
:
[0083][0084]
其中,为测试设备处于所述退化状态后出现故障的时间,为当前时间。
[0085]
之后,可以根据物理设备的状态估量值和测试设备的状态测量值,计算得到物理设备当前的退化状态与测试设备之间的相似性参数,相似性参数的计算式如下:
[0086][0087]
[0088]
其中,λ为使在验证数据集上计算的基于相似性的预测的误差最小化的值,其取值5
×
10
‑5时可最大限度地提高预测的准确性,为测试设备处于退化状态时的状态测量值,为物理设备处于相同退化状态时的状态估量值,为测试设备与物理设备处于相同退化状态时的状态值方差。
[0089]
然后,通过测试设备的剩余使用寿命和所述相似性参数可以预测出物理设备的剩余使用寿命,即物理设备的维护时间rul:
[0090][0091]
其中,是采用上述相似性参数计算出的当前时间的相似性参数。
[0092]
最后,根据置信函数理论对预测出的维护时间进行修正,消除利用模糊相似理论预测维护时间的不确定性。如此,即便物理设备的状态数据或者测试设备的状态测量值的数量量较少,仍然可以消除模糊相似方法给预测结果带来的不确定性,提高维护时间的准确性,具体计算方法如下:
[0093][0094][0095]
其中,γ为设备退化轨迹集的信任度,取值[0,1],m
rul
为修正后的维护时间。
[0096]
在本实施例中,优选的,创建所述数字孪生模型,包括:
[0097]
根据物理设备的场景特征量数据构建不同形态的数字孪生模型;
[0098]
定义不同形态的数字孪生模型与物理设备的场景特征量数据之间的数据接口。数据接口用于在物理设备的场景特征量数据超出预设范围时切换数字孪生模型形态。
[0099]
获取所述物理设备的实时场景特征量数据,并通过数据接口匹配相应形态的数字孪生模型装配到隧道虚拟场景中。
[0100]
具体而言,可以将实时场景特征量数据与不同形态的数字孪生模型对应的场景特征量数据进行对比,若实时场景特征量数据在某种形态的数字孪生模型特征量数据范围内,则匹配该形态的数字孪生模型注入隧道虚拟场景内;若实时场景特征量数据超过了当前形态的数字孪生模型的场景特征量数据范围,则匹配对应的场景特征量数据范围的数字孪生模型并装配到隧道虚拟场景内,从而实时直观地、真实地反映隧道内的运行状态。
[0101]
在本实施例中,优选的,还包括:
[0102]
定义不同形态的数字孪生模型与物理设备的状态数据之间的数据接口;数字孪生模型与物理设备的状态数据之间的数据接口可以用于在物体设备状态变化时切换数字孪生模型形态,从而真实地反映隧道内的运行状态。
[0103]
获取物理设备的实时状态数据,并通过数据接口匹配相应形态的数字孪生模型装配到隧道虚拟场景中。
[0104]
具体而言,可以将实时状态数据与不同形态的数字孪生模型对应的状态数据进行对比,若实时状态数据在某种形态的数字孪生模型的状态数据范围内,则匹配该形态的数
字孪生模型注入隧道虚拟场景内;若实时状态数据超过了当前形态的数字孪生模型的状态数据范围,则匹配对应的状态数据范围的数字孪生模型并装配到隧道虚拟场景内,从而实时直观地、真实地反映隧道内的运行状态。
[0105]
一种存储介质,存储有计算机程序,该计算机程序运行时,执行上述的仿真模拟方法。
[0106]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。