1.本发明涉及由于其相对于手持式手术器械的增加的准确度和便利性而用于微创医疗程序中的机器人手术系统。
背景技术:
2.机器人手术系统由于其相对于手持式手术器械的增加的准确度和便利性而用于微创医疗程序中。在这些机器人手术系统中,机器人臂支撑手术器械,手术器械具有通过腕部组合件安装到其上的末端执行器。在操作中,机器人臂移动到患者上方的某一位置,且接着经由手术端口或患者的天然腔道导引手术器械进入小切口中来将末端执行器定位在患者身体内的工作位点。
3.一些机器人手术系统采用推车来支撑机器人臂,并且允许临床医生将机器人臂移动到手术室内的不同位置。在执行手术程序时,期望的是将推车保持在静止位置。
技术实现要素:
4.在本公开的一个方面,提供一种用于支撑机器人臂的手术推车,并且所述手术推车包含基座、联接到基座的多个脚轮、由基座可旋转地支撑并且可操作地联接到多个脚轮中的第一脚轮的第一杆,以及由基座可旋转地支撑并且可操作地联接到第二脚轮的第二杆。第一杆被配置成在第一方向上旋转以锁定或解锁第一脚轮中的一种,并且第二杆可操作地联接到第一杆,使得第一杆在第一方向上的旋转引起第二杆在第二方向上旋转以锁定或解锁第二脚轮中的一种。
5.在一些方面,第二杆在第一方向上的旋转可被配置成引起第一杆在第二方向上旋转以锁定或解锁第一和第二脚轮中的另一种。
6.在另外的方面,第一和第二杆可彼此平行。
7.在其它方面,手术推车可另外包含联接到第一杆的第一踏板和联接到第二杆的第二踏板。第一踏板可被配置成在第一方向上旋转第一杆并且进而在第二方向上旋转第二杆。第二踏板可被配置成在第一方向上旋转第二杆并且进而在第二方向上旋转第一杆。
8.在各方面,第一杆在第一方向上的旋转可解锁第一脚轮并且第二杆在第二方向上的旋转可解锁第二脚轮。第二杆在第一方向上的旋转可锁定第二脚轮并且第一杆在第二方向上的旋转可锁定第一脚轮。
9.在一些方面,手术推车可另外包含第一连杆,其具有可旋转联接到第一杆的第一曲柄的第一端和可操作地联接到第一脚轮的第二端。第一杆在第一方向上的旋转可经由第一曲柄使第一连杆移动以锁定或解锁第一脚轮中的一种。
10.在另外的方面,第一杆在第二方向上的旋转可经由第一曲柄使第一连杆移动以锁定或解锁第一脚轮中的另一种。
11.在其它方面,第一连杆可垂直于第一和第二杆。
12.在各方面,第一脚轮可具有可操作地联接到其上的曲柄。第一连杆的第二端可以
可旋转地联接到第一脚轮的曲柄,使得第一连杆的移动使第一脚轮的曲柄旋转以锁定或解锁第一脚轮中的一种。
13.在一些方面,第一脚轮可具有不可旋转地联接到第一脚轮的曲柄的锁定杆。锁定杆经由第一脚轮的曲柄的旋转可锁定或解锁第一脚轮中的一种。
14.在另外的方面,手术推车可另外包含第二连杆,其具有可旋转联接到第一杆的第二曲柄的第一端和可操作地联接到多个脚轮中的第三脚轮的第二端。第一杆在第一方向上的旋转可经由第二曲柄使第二连杆移动以锁定或解锁第三脚轮中的一种。
15.在其它方面,第一和第二连杆可垂直于第一和第二杆。
16.在各方面,第三脚轮可具有可操作地联接到其上的曲柄。第二连杆的第二端可以可旋转地联接到第三脚轮的曲柄,使得第二连杆的移动使第三脚轮的曲柄旋转以锁定或解锁第三脚轮中的一种。
17.在一些方面,第三脚轮可具有不可旋转地联接到第三脚轮的曲柄的锁定杆,使得第三脚轮的锁定杆经由第三脚轮的曲柄的旋转锁定或解锁第三脚轮中的一种。
18.在另外的方面,手术推车可另外包含第一臂,其具有可旋转地联接到第二杆的第一曲柄的第一端和可操作地联接到第二脚轮的第二端。第二杆在第二方向上的旋转可经由第二杆的第一曲柄使第一臂移动以锁定或解锁第二脚轮中的一种。
19.在其它方面,第二杆在第一方向上的旋转可经由第二杆的第一曲柄使第一臂移动以锁定或解锁第二脚轮中的另一种。
20.在各方面,第二脚轮可具有可操作地联接到其上的曲柄。第一臂的第二端可以可旋转地联接到第二脚轮的曲柄,使得第一臂的移动使第二脚轮的曲柄旋转以锁定或解锁第二脚轮中的一种。
21.在一些方面,手术推车可另外包含第二臂,其具有可旋转地联接到第二杆的第二曲柄的第一端和可操作地联接到多个脚轮中的第四脚轮的第二端。第二杆在第一方向上的旋转可经由第二杆的第二曲柄使第二臂移动以锁定或解锁第四脚轮中的一种
22.在另外的方面,第一和第二杆中的每一个可具有不可旋转地联接到其上的齿轮。第一和第二杆的齿轮彼此接合。
23.在其它方面,锁定第一脚轮可包含防止第一脚轮的轮子旋转和/或防止第一脚轮回转。
24.下文参考附图更详细地描述本公开的示例性实施例的其它细节和方面。
25.如本文中所使用,术语平行和垂直应理解为包含与真实平行和真实垂直相差约 或
‑
10度的基本上平行和基本上垂直的相对配置。
附图说明
26.并入在本说明书中且构成本说明书的一部分的附图示出本公开的实施例,且与上文所给出的本公开的一般描述及下文所给出的实施例的详细描述一起用以阐释本公开的原理,其中:
27.图1是根据本公开的包含手术推车的机器人手术系统的示意性图示;
28.图2是图1的机器人手术系统的手术推车的一个实施例的透视图;
29.图3是图2的手术推车的顶盖移除的俯视图;
30.图4是图2的手术推车的零件移除的后透视图;
31.图5是图2所示的手术推车的零件移除的另一个后透视图;和
32.图6是图2的手术推车的传感器组合件的放大视图。
具体实施方式
33.参看图式详细地描述包含机器人臂推车及其使用方法的各种实施例的当前公开的机器人手术系统的实施例,图式中相同参考数字在若干视图中的每一个中指定相同或相应的元件。如本文所使用,术语“远侧”指代机器人手术系统或其组件的较靠近患者的部分,而术语“近侧”指代机器人手术系统或其组件的较远离患者的部分。
34.如下文将详细地描述,提供一种用于支撑机器人臂且用于促进机器人臂在手术室内到处移动的手术推车的实施例。推车包含配备有轮子的基座、从基座竖直延伸的支撑柱,以及制动系统,该制动系统包含一系列相互连接的连杆,允许选择性地锁定和解锁推车的轮子。
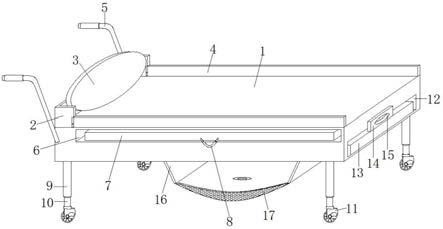
35.首先参考图1,示出了手术系统,例如机器人手术系统1。在实施例中,机器人手术系统1位于手术室“or”内。机器人手术系统1通常包含具有手术器械(例如,可拆卸地附接到其上的机电器械10)的多个手术机器人臂2、3;控制装置4;以及与控制装置4联接的操作控制台5。
36.操作控制台5包含显示装置6,其特别地设置成显示三维图像;以及手动输入装置7、8,借助于所述手动输入装置,人员(未展示)(例如临床医生)能够在第一操作模式下遥控机器人臂2、3,此原则上为所属领域的技术人员所知。机器人臂2、3中的每一个可以由通过接头连接的多个部件组成。
37.机器人臂2、3可由连接到控制装置4的电驱动器(未图示)来驱动。控制装置4(例如,计算机)设置成激活驱动器,确切地说借助于计算机程序激活驱动器,其方式为使得机器人臂2、3和因此机电器械10(包含机电末端执行器(未示出))根据借助于手动输入装置7、8限定的移动来执行所要移动。还可设置控制装置4,其方式为使得其调节机器人臂2、3和/或驱动器的移动。
38.机器人手术系统1被配置成在躺在手术台“st”上待借助于手术器械(例如机电器械10)以微创方式治疗的患者“p”上使用。机器人手术系统1还可包含多于或少于两个机器人臂2、3,额外机器人臂同样连接到控制装置4且可借助于操作控制台5遥控。例如机电器械10(包含机电末端执行器)等手术器械也可附接到额外机器人臂。
39.机器人臂(例如机器人臂3)支撑在手术推车100上(图2)。手术推车100可并入有控制装置4。在实施例中,机器人臂(例如机器人臂2)可联接到手术台“st”。
40.为了详细论述机器人手术系统的构造和操作,可参考标题为“医疗工作站(medical workstation)”的第8,828,023号美国专利,该美国专利的整个内容以引用的方式并入本文中。
41.参考图2,通常使用参考数字100展示被配置成根据本公开使用的机器人手术系统1的手术推车的一个示例性实施例。手术推车100被配置成将机器人臂3(图1)移动到手术室“or”(图1)内的选定位置,且提供机器人臂3的高度调整。手术推车100通常包含推车基座102、从推车基座102竖直(即,垂直)延伸的支撑柱104,以及可滑动地支撑在柱104上并且被
配置成用于在其上支撑机器人臂3的托架或滑件106。
42.参考图2
‑
5,手术推车100的推车基座102固定到支撑柱104的第一端并且包含四个脚轮103a、103b、103c、103d。在一些实施例中,推车基座102可包含多于或少于四个脚轮。推车基座102另外包含两个脚踏板105a、105b,它们经由制动机构110联接到脚轮103a
‑
103d,所述制动机构110的作用是分别经由脚踏板105a、105b的致动选择性地解锁和锁定脚轮103a
‑
103d,如本文中将详细描述的。
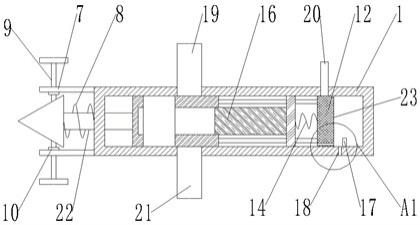
43.制动机构110通常包含第一杆112和第二杆114、联接到第一杆112的第一连杆124和第二连杆134,以及联接到第二杆114的第一臂148和第二臂160,每个都支撑在基座102中。第一踏板105a(例如,脚踏板)不可旋转地联接到第一杆112,使得第一踏板105a的下压引起第一杆112在由图5中的箭头“a”指示的第一方向上旋转。第二踏板105b(例如,脚踏板)不可旋转地联接到第二杆114,使得第二踏板105b的下压引起第二杆114同样在第一方向上旋转。第一杆112和第二杆114彼此平行并且经由对应的联接器例如正齿轮116、118彼此可操作地联接。以此方式,第一杆112和第二杆114在彼此相反的方向上旋转。举例来说,如果第一踏板105a被压下,那么第一杆112在第一方向上旋转,从而驱动第二杆114在由图5中的箭头“b”指示的第二相反的方向上旋转。
44.参考图3
‑
5,第一杆112具有第一端部112a和第二端部112b。第一杆112的第一端部112a具有不可旋转地固定到其上的齿轮116。第一杆112的第二端部112b可操作地联接到第一脚轮103a和第三脚轮103c。特别地,第一杆112的第二端部112b具有固定到其上的第一曲柄120和第二曲柄122。第一曲柄120具有不可旋转地联接到第一杆112的第二端部112b的第一端120a,使得第一曲柄120与第一杆112一起旋转。第一曲柄120具有第二端120b,其具有可旋转地联接到其上的第一连杆124的第一端部124a。
45.制动机构110的第一连杆124将第一杆112可操作地联接到第一脚轮103a。第一连杆124相对于第一杆112垂直并且相对于第一杆112可更短。由于第一连杆124的第一端部124a可旋转地联接到第一曲柄120的第二端120b,所以第一曲柄120与第一杆112的旋转驱动第一连杆124的移动。第一连杆124具有可旋转地联接到第一脚轮103c的曲柄126的第二端部124b。
46.第一脚轮103a的曲柄126具有可旋转地联接到第一连杆124的第二端部124b的第一端126a和不可旋转地联接到第一脚轮103a的锁定杆128的第二端126b。第一脚轮103a的锁定杆128延伸穿过第一脚轮103c的壳体130,并且被配置成选择性地锁定和解锁第一脚轮103a的轮子132以及锁定和解锁第一脚轮103c的轮子132的回转。经考虑锁定杆128可具有非圆形横截面轮廓,如六边形或任何合适的多边形。锁定杆128可与脚轮103a内部的中央锁定机构或凸轮(未示出)相互作用以解锁和锁定轮子132。
47.在使用中,为了解锁第一脚轮103a,可压下第一踏板105a以使第一杆112在由箭头“a”指示的方向上绕其纵向轴线旋转。第一杆112在第一方向上的旋转驱动第一杆112的第一曲柄120的旋转,由此第一曲柄120以往复/旋转类型运动(例如,平移和旋转)在朝向第一杆112的大体方向(即,远离第一脚轮103a)上移动第一连杆124。第一连杆124朝向第一杆112的移动驱动第一脚轮103a的曲柄126的旋转,并且进而驱动第一脚轮103a的锁定杆128在第一方向上旋转,以解锁第一脚轮103a。
48.为了锁定第一脚轮103a,可压下第二踏板105b以使第二杆114在由箭头“a”指示的
第一方向上绕其纵向轴线旋转。由于对应的第一杆112和第二杆114的齿轮116、118的相互作用,第二杆114在第一方向上的旋转引起第一杆112在由箭头“b”指示的相反的第二方向上旋转。第一杆112在第二方向上的旋转驱动第一杆112的第一曲柄120的旋转,由此第一曲柄120以往复/旋转类型运动在远离第一杆112的大体方向上移动第一连杆124。第一连杆124远离第一杆112的移动驱动第一脚轮103a的曲柄126的旋转,并且进而驱动第一脚轮103a的锁定杆128在第二方向上旋转,以锁定第一脚轮103a。
49.继续参考图3
‑
5,制动机构110的第二连杆134可操作地联接第一杆112和第三脚轮103c。更具体地,第二连杆134具有可旋转地联接到第一杆112的第二曲柄122的第一端部134a和可旋转地联接到第三脚轮103c的曲柄136的第二端部134b。因此,第二曲柄122与第一杆112的旋转驱动第二连杆134的往复/旋转类型移动。第二连杆134、第一杆122的第二曲柄122和第三脚轮103c的曲柄136以与以上所述的第一连杆124、第一杆112的第一曲柄120和第一脚轮103a的曲柄126类似的方式一起工作。
50.第三脚轮103c的曲柄136不可旋转地联接到第三脚轮103c的锁定杆138。第三脚轮103c的锁定杆138延伸穿过第三脚轮103c的壳体140,并且被配置成选择性地锁定和解锁第三脚轮103c的轮子142以及锁定和解锁第三脚轮103c的轮子142的回转。
51.在使用中,为了解锁第三脚轮103c,可压下第一踏板105a以使第一杆112在由箭头“a”指示的方向上绕其纵向轴线旋转。第一杆112在第一方向上的旋转驱动第一杆112的第二曲柄122的旋转,由此第二曲柄122在远离第一杆112的大体方向上移动第二连杆134(例如,平移和旋转)。第二连杆134远离第一杆112的移动驱动第三脚轮103c的曲柄136的旋转,并且进而驱动第一脚轮103c的锁定杆138在被配置成解锁第三脚轮103c的方向上旋转。
52.为了锁定第三脚轮103c,可压下第二踏板105b以使第二杆114在由箭头“a”指示的第一方向上绕其纵向轴线旋转。由于对应的第一杆112和第二杆114的齿轮116、118的相互作用,第二杆114在第一方向上的旋转引起第一杆114在由箭头“b”指示的相反的第二方向上旋转。第一杆112在第二方向上的旋转驱动第一杆112的第二曲柄122的旋转,由此第二曲柄122在朝向第一杆112的大体方向上移动第二连杆134。第二连杆朝向第一杆112的移动驱动第三脚轮103c的曲柄136的旋转,并且进而驱动第三脚轮103c的锁定杆138在被配置成锁定第三脚轮103c的方向上旋转。
53.继续参考图2
‑
5,制动机构110的第二杆114具有第一端部114a和第二端部114b。第二杆114的第一端部114a具有不可旋转地固定到其上的齿轮118。第二杆114的第二端部114b可操作地联接到第二脚轮103b和第四脚轮103d。特别地,第二杆114的第二端部114b具有固定到其上的第一曲柄144和第二曲柄146。第二杆114的第一曲柄144具有不可旋转地联接到第二杆114的第二端部114b的第一端144a,使得第一曲柄144与第二杆114一起旋转。第一曲柄144具有第二端144b,其具有可旋转地联接到其上的第一臂148的第一端部148a。
54.制动机构110的第一臂148将第二杆114可操作地联接到第二脚轮103b。第一臂148相对于第二杆114垂直并且相对于第二杆114可更短。由于第一臂148可旋转地联接到第一曲柄144,所以第一曲柄144与第二杆114的旋转驱动第一臂148的移动。第一臂148具有可旋转地联接到第二脚轮103b的曲柄150的第二端部148b。
55.第二脚轮103b的曲柄150具有可旋转地联接到第一臂148的第二端部148b的第一端150a和不可旋转地联接到第二脚轮103b的锁定杆152的第二端150b。第二脚轮103b的锁
定杆152延伸穿过第二脚轮103b的壳体154,并且被配置成选择性地锁定和解锁第二脚轮103b的轮子156以及锁定和解锁第二脚轮103b的轮子156的回转。
56.在使用中,为了解锁第二脚轮103b,可压下第一踏板105a以使第一杆112在由箭头“a”指示的方向上绕其纵向轴线旋转。第一杆112在第一方向上的旋转驱动第二杆114在如由箭头“b”指示的相反的第二方向上旋转。第二杆114的第一曲柄144与第二杆114一起旋转,由此第一曲柄144在远离第二杆114的大体方向上移动第一臂148(例如,平移和旋转)。第一臂148远离第二杆114的移动驱动第二脚轮103b的曲柄150的旋转,并且进而驱动第二脚轮103b的锁定杆152在被配置成解锁第二脚轮103b的方向上旋转。
57.为了锁定第二脚轮103b,可压下第二踏板105b以使第二杆114在由箭头“a”指示的第一方向上绕其纵向轴线旋转。第二杆114在第一方向上的旋转驱动第二杆114的第一曲柄144的旋转,由此第一曲柄144在朝向第二杆114的大体方向上移动第一臂148。第一臂148朝向第二杆114的移动驱动第二脚轮103b的曲柄150的旋转,并且进而驱动第二脚轮103b的锁定杆152在被配置成锁定第二脚轮103b的方向上旋转。
58.制动机构110的第二臂160可操作地联接第二杆114和第四脚轮103d。更具体地,第二臂160具有可旋转地联接到第二杆114的第二曲柄146的第一端部160a和可旋转地联接到第四脚轮103d的曲柄162的第二端部160b。因此,第二曲柄146与第二杆114的旋转驱动第二臂160的移动。第二臂160、第二杆114的第二曲柄146和第四脚轮103d的曲柄162以与以上所述的第一臂148、第二杆114的第一曲柄144和第二脚轮103b的曲柄150类似的方式一起工作。
59.第四脚轮103d的曲柄162不可旋转地联接到第四脚轮103d的锁定杆164。第四脚轮103d的锁定杆164延伸穿过第四脚轮103d的壳体166,并且被配置成选择性地锁定和解锁第四脚轮103d的轮子168以及锁定和解锁第四脚轮103d的轮子168的回转。
60.在使用中,为了解锁第四脚轮103d,可压下第一踏板105a以使第一杆112在由箭头“a”指示的方向上绕其纵向轴线旋转。第一杆112在第一方向上的旋转驱动第二杆114在如由箭头“b”指示的相反的第二方向上旋转。第二杆114的第二曲柄146与第二杆114一起旋转,由此第二曲柄146在朝向第二杆114的大体方向上移动第二臂160(例如,平移和旋转)。第二臂160朝向第二杆114的移动驱动第四脚轮103的曲柄162的旋转,并且进而驱动第四脚轮103d的锁定杆164在被配置成解锁第四脚轮103d的方向上旋转。
61.为了锁定第四脚轮103d,可压下第二踏板105d以使第二杆114在由箭头“a”指示的第一方向上绕其纵向轴线旋转。第二杆114在第一方向上的旋转驱动第二杆114的第二曲柄146的旋转,由此第二曲柄146在远离第二杆114的大体方向上移动第二臂160。第二臂160远离第二杆114的移动驱动第四脚轮103d的曲柄162的旋转,并且进而驱动第四脚轮103d的锁定杆164在被配置成锁定第四脚轮103d的方向上旋转。
62.从上面可理解,制动机构110经由第一踏板105a的致动提供所有脚轮103a
‑
d的同时或几乎同时解锁,以及经由第二踏板105b的致动提供所有脚轮103a
‑
d的同时或几乎同时锁定。在实施例中,制动机构110可被配置成使得第一踏板105a的压下或抬升可导致脚轮103a
‑
d的锁定或解锁,或者第二踏板105b的压下或抬升可导致脚轮103a
‑
d的锁定或解锁。
63.参考图8,制动机构110可另外包含用于确定脚轮103a
‑
d是否处于锁定或解锁状态的感测组合件170。感测组合件170包含感测元件172,例如霍尔效应传感器,以及感测的元
件174,例如磁体。在实施例中,感测组合件170可包含任何合适的位置传感器,例如电位计、接近传感器、旋转编码器、线性可变差动变压器、涡流传感器等。感测元件172使用第一凸缘176固定到推车100的基座102(图3)并且感测的元件174使用第二凸缘178联接到第一杆112。第二凸缘178不可旋转地联接到第一杆112,使得第二凸缘178以及感测的元件174与第一杆112一起旋转。经考虑感测的元件174可附接到制动机构110的任何合适的组件,例如第二杆114、第一连杆124或第二连杆134,或第一臂148或第二臂160。
64.感测的元件174和感测元件172彼此相邻设置并且在制动机构110的锁定和解锁期间移入和移出对准。举例来说,在使用中,当压下第一踏板105a(图3)以解锁制动机构110时,第一杆112在第一方向上旋转,从而随其旋转感测组合件170的第二凸缘178。第二凸缘178的旋转将感测的元件174从第一位置移动到第二位置,在所述第一位置中感测的元件174与感测元件172不对准,如图8所示,在所述第二位置中感测的元件174与感测元件172对准。当感测的元件174处于第二位置时,感测元件172将对应的信号发送到控制装置4(图1),其使用信号来确定脚轮103a
‑
d处于解锁状态。在实施例中,推车100可提供有脚轮103a
‑
d处于解锁状态的音频或视觉指示器。
65.在压下第二踏板105b以锁定制动机构110时,第二杆114在第一方向上旋转,这驱动第一杆112在第二方向上旋转,如上所述。感测组合件170的第二凸缘178与第二杆114一起在第二方向上旋转。第二凸缘178的旋转使感测的元件174相对于感测元件172从第二位置移动到第一位置。当感测的元件174处于第一位置时,感测元件172将对应的信号发送到控制装置4(图1),其使用信号来确定脚轮103a
‑
d处于锁定状态。
66.尽管在附图中展示了本公开的几个实施例,但并不旨在将本公开限制于此,而是旨在使本公开的范围与所属领域所允许的一样宽,并且本说明书同样被阅读。还设想了上文实施例的任何组合,且所述组合在要求保护的发明的范围内。因此,上文的描述不应解释为限制性的,而仅仅是作为特定实施例的例证。本领域的技术人员将设想在本文所附的权利要求书的范围和精神内的其它修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。