1.本实用新型涉及自动化家具技术领域,尤其涉及一种叠衣机器人。
背景技术:
2.现有的叠衣机器人中,叠衣装置上各个不同区域的板上的转轴都连接在中间板的四周,这样导致了控制中间板的打开闭合传送衣服的转轴与两侧板的转轴互相干扰,使得中间板的打开闭合不能正常实现。而且这样的连接方式会导致叠衣装置各个板块之间的间距较小,使得电机的安装极为困难。另外,当衣服被从衣架中取下后,掉落的衣架没有地方收纳,增加了用户的使用负担。
技术实现要素:
3.本实用新型实施例的目的在于提供一种叠衣机器人,旨在提供一种具有自动烘干、叠衣并收纳空衣架的叠衣机器人。
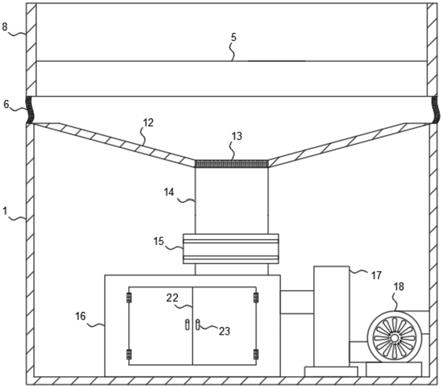
4.本实用新型实施例是这样实现的,一种叠衣机器人,包括叠衣装置、底座、烘干机、衣架导轨、传送链条和取衣抽屉,其中,所述底座位于所述叠衣机器人底部,所述底座四周设置有支架,所述支架上悬挂有所述传送链条,所述底座侧面设置有所述取衣抽屉,所述底座上方设置有叠衣装置,内部设置有用于放置所述烘干机和已叠衣物的空腔。
5.进一步地,所述叠衣装置包括底板、叠衣板、固定框架、连接页和电机,所述叠衣板和所述固定框架通过所述连接页连接。
6.进一步地,所述叠衣装置下方设置有用于运输衣服的通道,所述通道与所述取衣抽屉连接。
7.进一步地,所述底座设置有限制块和出气孔。
8.进一步地,所述衣架导轨末端为挂钩状。
9.进一步地,所述叠衣板材料为亚克力板。
10.进一步地,所述连接页一端和电机转轴相连,另一端和叠衣板相连。
11.进一步地,所述连接页结构为子母页,子页片和母页片均安装在合页轴上形成铰链连接,所述子页片和所述母页片均在所述合页轴同一个切线方向上。
12.进一步地,所述子页片和所述母页片上均开有圆孔。
13.本实用新型具有以下有益效果:该设计既可烘干衣服,又可自动叠衣,全自动,结构简单、紧凑,十分适合家庭使用。
附图说明
14.图1为本实用新型实施例提供的一种叠衣机器人的结构示意图;
15.图2为叠衣机器人的叠衣装置结构示意图;
16.图3为叠衣机器人的叠衣装置局部示意图;
17.图4为叠衣机器人的连接页结构示意图;
18.图5为叠衣机器人的底座结构示意图;
19.图6为一种通过按键实现直流电机的停启控制的模型的电路结构示意图;
20.图7为一种通过按键实现直流电机的正反转及停止控制的模型的电路结构示意图;
21.图8为p1.0、p1.1在不同状态下电路各部分的工作状态及电机状态示意图。
具体实施方式
22.为了使本实用新型要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.本实用新型提供了一种叠衣机器人,如图1所示,包括叠衣装置1、底座2、烘干机3(图中未显示)、衣架导轨4、传送链条5和取衣抽屉6。其中,底座 2位于叠衣机器人底部,底座2四周设置有支架,支架上悬挂着传送链条5。底座2侧面设置有取衣抽屉6,上方设置有叠衣装置1,内部设置有用于放置烘干机和已叠衣物的空腔。
24.进一步地,如图2所示,叠衣装置1包括底板11、叠衣板12、固定框架 13、连接页14和电机15,具体地,底板11位于叠衣装置1最下方,固定框架13为方框结构,位于底板11上方。叠衣板13数目为4片,分为两片长叠衣板和两片短叠衣板,其中一片短叠衣板位于固定框架13内,另一片短叠衣板位于固定框架下侧,长叠衣板对称设置于短叠衣板左右两侧。
25.进一步地,四片叠衣板12通过连接页14和固定框架13转轴连接,这样设计使得各个叠衣板12可以独立工作,互不干扰。
26.进一步地,底板11的连接页处14设置有对应的电机安装槽。
27.进一步地,叠衣板12材料优选具有较好的透明性、化学稳定性、耐候性的亚克力板。
28.进一步地,叠衣板12八个角加工为圆角,叠衣板12开有不少于一个圆孔。
29.进一步地,如图3所示,连接页14一端和电机15转轴相连,另一端和叠衣板12相连,电机15转轴可以带动连接页14转动。
30.进一步地,电机15优选可以正转和反转的电机,用于实现叠衣板的张开和闭合。
31.进一步地,位于固定框架13内的短叠衣板面积小于框架内面积。
32.进一步地,如图4所示,连接页14类似子母合页,子页片和母页片均安装在合页轴上且形成铰链连接,皆在合页轴同一个切线方向上。子页片与母页片上均留有孔,通过螺丝将子母合页与叠衣板12连接。使用子母合页可以使得叠衣板12不需要另外开槽,减少了加工工序,整体外观也更为整洁美观。子页片可以绕轴360
°
进行旋转,并且可以嵌合到母页片的掏空的部分。
33.进一步地,连接页14材料优选304不锈钢。
34.进一步地,如图5所示,位于固定框架13内的短叠衣板正下方设置有用于运输衣服的通道21,通道位于底座2内,与取衣抽屉6连接。
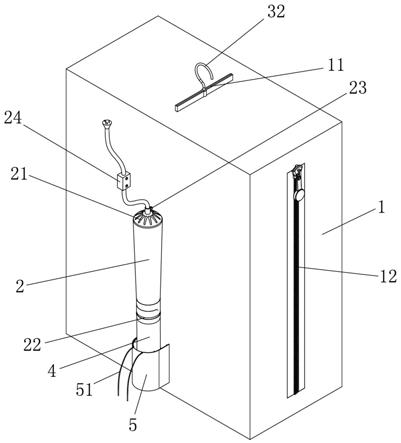
35.进一步地,如图5所示,衣架导轨4位于叠衣装置1下侧,方向向下,对称设置于底座2阶梯处,阶梯处的衣架导轨4表面为弧面。
36.进一步地,衣架导轨4末端设置为挂钩状,设置成倒勾状可以接住自动向下滑落的
完成烘干以及叠衣步骤的衣架(图中未显示),并储存在其中,方便使用者进行下一次的取用。
37.进一步地,取衣抽屉6设置于底座2一侧的开口中,取衣抽屉6合上时接衣板位于底座内运输衣服的通道21的正下方,在所有的衣服完成叠衣步骤后取衣抽屉6就会弹出,方便使用者拿取叠好的衣服。
38.进一步地,在底座2的中间处设置有两个限制块22,通过设置两个限制块 22可使得衣架(图中未显示)在运行到限制块22时,衣架的两个臂被两个限制块22挡住并向内收合,使衣架与衣服分离,衣服留在1叠衣装置上,衣架则沿着衣架导轨4滑到挂钩处。
39.进一步地。该叠衣机器人使用的衣架为特殊结构的衣架(图中未显示)。
40.进一步地,烘干机3(图中未显示)位于底座2内部,烘干机3出风口31 位于底座2的上表面处,与限制块22位于同一水平线,风口朝上。
41.进一步地,传送链条5组数为三组,每组链条节数不同,并对应两个大小不同的齿轮。一个齿轮的齿数是17,孔径为30mm,另一个齿轮的齿数是19,孔径为50mm。通过设置传送链条5可驱动晾衣杆的移动。
42.进一步地,本实用新型还包括单片机,用于实现对叠衣机器人各种功能的自动控制,具体地,单片机优选c51单片机。
43.进一步地,本实用新型还包括一种通过按键实现直流电机的停启控制的模型,应用于叠衣机器人中的链条传动、烘干机、蜂鸣器等只需单向通电实现的输出。按键控制直流电机停启的电路如图6所示,通过p3.6口按键触发启动直流电机,p3.7口的按键触发停止直流电机的运行。当p1.0输出高电平“1”时, npn型三极管导通,直流电机得电转动;当p1.0输出低电平“0”时,npn型三极管截止,直流电机停止转动。
44.进一步地,本实用新型还包括一种通过按键实现直流电机的正反转及停止控制的模型,用于实现对叠衣板的自动控制。通过按键控制直流电机正反转及停止控制的电路如图7所示,由s1键的触发实现电机的正转运行,s2键的触发实现电机的反转运行,s3键的触发实现电机的停止控制。通过对单片机的p1.0、p1.1口的控制即可实现电机的停止、正转和反转控制。p1.0、p1.1在不同状态下电路各部分的工作状态及电机状态如图8所示。
45.通过程序实现对电机正反转以及停止的控制:当s1闭合,p3.5接通,状态为0,此时让p1.0口状态为1,p1.1口状态为0,则三极管q1导通,三极管 q2截止,三极管q1导通可以使控制k1开关的模块得电使得k1开关打到vdd;同理,k2开关保持处于接地状态,因此电机左端接电源vdd右端接地,电机正转;同理:当s2闭合,程序分别控制p1.0和p1.1为0和1,最终让电机左端接地,右端接电源vdd,电机就实现了反转。
46.本实用新型具有以下有益效果:该设计既可烘干衣服,又可自动叠衣,全自动,结构简单、紧凑,十分适合家庭使用。
47.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。