1.本发明涉及医疗器械技术领域,尤其涉及一种可穿戴压力治疗系统及控制方法。
背景技术:
2.压力治疗系统广泛应用于医学外科手术和康复,目前常见的基于气动的压力治疗系统仅具备压力输出功能,缺乏使用终端的实时反馈。而用户的需求随着患病等级、身体条件的不同而不同,单一的输出会造成用户疗效不理想,甚至会因压力过大造成身体损伤。
3.因此,现有技术还有待改进和发展。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种可穿戴压力治疗系统及控制方法,旨在解决现有技术中压力治疗系统不能获取使用终端的实时反馈,不能针对不同需求对压力进行相应调整的问题。
5.本发明的技术方案如下:
6.本发明的第一方面,提供了一种可穿戴压力治疗系统,其中,所述可穿戴压力治疗系统包括:
7.多腔气囊,所述多腔气囊包括若干个腔室;
8.若干个柔性力传感器,所述若干个柔性力传感器设置在所述多腔气囊表面;
9.控制器,所述控制器与所述柔性力传感器通信连接;
10.气泵,所述气泵与所述控制器通信连接,所述气泵与所述多腔气囊通过气管连接。
11.所述的可穿戴压力治疗系统,其中,所述柔性力传感器和所述腔室一一对应设置。
12.所述的可穿戴压力治疗系统,其中,所述柔性力传感器包括若干个力感应单元。
13.所述的可穿戴压力治疗系统,其中,所述力感应单元包括两层基板和设置在所述两层基板之间的力敏感半导体电阻。
14.所述的可穿戴压力治疗系统,其中,所述可穿戴式压力治疗系统还包括压差传感器,所述压差传感器与所述控制器通信连接,所述压差传感器用于感应所述多腔气囊内的气压。
15.所述的可穿戴压力治疗系统,其中,所述可穿戴压力治疗系统还包括蓝牙模块,所述蓝牙模块与所述控制器通信连接。
16.本发明的第二方面,提供了一种基于上述任一项所述的可穿戴压力治疗系统的控制方法,其中,所述控制方法包括:
17.所述控制器控制所述气泵向所述多腔气囊的各个腔室进行充气和排气,以使得所述多腔气囊的各个腔室依次充气和排气;
18.所述控制器接收所述柔性力传感器采集的所述多腔气囊的表面对应位置的压力信息并显示所述压力信息。
19.所述的控制方法,其中,所述显示所述压力信息之后,还包括:
20.所述控制器接收压力调节指令,所述控制器根据所述压力调节指令确定对应的气压调节信息,其中,所述压力调节指令中包括目标压力;
21.所述控制器根据所述气压调节信息控制所述气泵调节所述多腔气囊内的气压,以使得所述柔性力传感器采集的压力信息与所述目标压力一致。
22.所述的控制方法,其中,所述控制器根据所述压力信息调节指令确定对应的气压调节信息包括:
23.所述控制器根据所述柔性力传感器采集的压力信息以及所述多腔气囊内的气压确定所述多腔气囊内的气压与所述柔性力传感器采集的压力信息的对应关系;
24.所述控制器根据所述压力调节指令对应的所述目标压力和所述对应关系确定所述气压调节信息。
25.本发明的技术效果:本发明提供的可穿戴压力治疗系统中在多腔气囊表面设置有柔性力传感器,可穿戴压力治疗系统中还包括控制器,控制器分别与柔性力传感器和与多腔气囊连接的气泵通信连接,从而使得控制器能够获取柔性力传感器采集的压力数据,即获取可穿戴压力治疗系统的使用端的受力反馈,控制器还可以控制气泵进而改变多腔气囊内的气压,实现根据使用端的受力反馈对压力进行相应调节。
附图说明
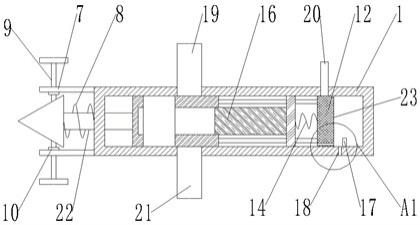
26.图1是本发明提供的可穿戴压力治疗系统的实施例的结构示意图;
27.图2是本发明提供的可穿戴压力治疗系统的实施例中多腔气囊的腔室分布示意图;
28.图3是本发明提供的可穿戴压力治疗系统的实施例中多腔气囊的各个腔室的压力变化图;
29.图4是本发明提供的可穿戴压力治疗系统的实施例中柔性力传感器的结构示意图;
30.图5是本发明提供的可穿戴压力治疗系统的实施例中柔性力传感器的实际安装效果图;
31.图6是本发明提供的可穿戴压力治疗系统的实施例应用于躯体上的受力示意图;
32.图7是本发明提供的控制方法的流程简图。
具体实施方式
33.为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
34.实施例一
35.请参阅图1,图1是本发明提供的一种可穿戴压力治疗系统的实施例的结构示意图。
36.如图1所示,本实施例提供的可穿戴压力治疗系统,包括多腔气囊,所述多腔气囊与气泵通过气管连接,所述气泵可以向所述多腔气囊内充气,当所述多腔气囊包裹在躯体上时,可以实现向躯体上加压,实现压力治疗。如图6所示,当所述多腔气囊包裹在躯体上
时,通过所述多腔气囊内的气压增大,所述多腔气囊的腔室体积会变大,进而对躯体的肌肉、软组织等产生挤压,实现压力治疗。所述多腔气囊的外层采用压层工艺进行纺织材料包裹,可以提升所述多腔气囊的生物相容性。所述可穿戴压力治疗系统还包括若干个柔性力传感器,所述若干个柔性力传感器设置在所述多腔气囊表面,具体地,是设置在所述多腔气囊的内表面,即在穿戴式接触躯体的一面,这样,所述柔性力传感器可以采集躯体上各个位置受到的压力,所述可穿戴压力治疗系统还包括控制器,所述控制器与所述柔性力传感器和所述气泵均通信连接,这样,所述控制器可以接收到所述柔性力传感器采集的数据,并且可以向所述气泵发送指令,使得气泵向所述多腔气囊内充气或排气以改变所述多腔气囊内的气压,实现实时接收躯体的受力反馈并进行相应调节。如图2所示,本实施例提供的可穿戴压力治疗系统中的所述多腔气囊,仿生蠕虫腔体,设置有若干个腔室,如图3所示,如图5所示,所述多腔气囊中的每个腔室都连接有气管,分别与所述气泵连接,当所述多腔气囊穿戴在躯体上时,通过所述气泵可以向各个所述腔室可以依次充气排气,循环运作,向躯体施加推进式的节律性生物机械力,有效促进血液循环。
37.所述柔性力传感器和所述腔室一一对应设置,从而使得每个所述腔室处于充气状态时对腔室对应的躯体部位的压力数据能被采集到。由于躯体表面是形状可变且存在起伏,当所述多腔气囊被穿戴在躯体上并充气时,不同点所承受的压力也不尽相同,为了更进一步地采集每个所述腔室对应的躯体部位上各个位置受到的压力,如图4所示,所述柔性力传感器中包括若干个力感应单元,通过所述力感应单元的分布设置,可以采集到躯体不同位置上受到的压力。具体地,所述力感应单元包括两层基板和设置在所述两层基板之间的力敏感半导体电阻,所述基板为绝缘基板,例如可以为聚对苯二甲酸乙二醇酯基板,这样可以起到抗电磁干扰的作用,所述力敏感半导体电阻可以为纳米级力敏感的半导体电阻,灵敏度高,所述力敏感半导体电阻的电阻值随着受力的不同而变化,因此,通过所述力感应单元可以获取到所述力感应单元所在位置受到的压力。所述柔性力传感器中的所述力感应单元的数量可以根据所述可穿戴压力治疗系统的适用躯体来确定,如图4所示,当所述可穿戴压力治疗系统用于下肢的压力治疗时,每个所述柔性力传感器中的所述力感应单元的数量可以设置得多些,例如每个所述柔性力传感器中可以包括8个力感应单元,如图5所示,当所述多腔气囊包裹在躯体上时,各个力感应单元可以采集到躯体上不同位置受到的压力情况。
38.为提高所述可穿戴压力治疗系统采集到的压力反馈的准确性,所有所述柔性力传感器在使用之前需进行校准,具体地,可以根据标准测试程序在设置好的底板上进行校准,并使用振动筛、数字万用表进行可靠性评估,使得所述柔性力传感器采集的数据准确且具有良好的可靠性。
39.如图1所示,所述可穿戴压力治疗系统还包括蓝牙模块,所述蓝牙模块与所述控制器通信连接,具体地,所述蓝牙模块可以是和所述控制器设置在控制板上,所述柔性力传感器采集的数据可以由旋转开关选择并发送到所述控制器中的a/d转换器通道,然后由a/d转换器转换为数值,数值通过端口(rx/tx)发送到所述蓝牙模块,所述蓝牙模块将数值发送至连接的远程设备,例如,手机端或电脑端,这样,可以实现将所述柔性力传感器采集的躯体各个位置的受力情况进行显示或进一步处理。
40.所述蓝牙模块还可以接收连接的远程设备的信号,例如可以通过连接的手机或电
脑发送的用于增大或减小压力的压力调节指令,所述蓝牙模块将接收到的信号发送到所述控制器,所述控制器根据接收到的信号控制气泵对所述多腔气囊进行充气或排气,以调节躯体受到的压力。
41.进一步地,所述可穿戴压力治疗系统还包括压差传感器,所述压差传感器用于获取所述多腔气囊内的具体气压值,所述压差传感器与所述控制器通信连接,这样,所述控制器不仅可以控制所述气泵对所述多腔气囊进行充气或排气实现增加所述多腔气囊内的气压和降低所述多腔气囊内的气压,还可以实现控制所述气泵对所述多腔气囊进行充气或排气将所述多腔气囊内的气压准确调节至设定的值的效果。
42.实施例二
43.基于实施例一中所述的可穿戴压力治疗系统,本发明还提供了一种控制方法,如图7所示,所述控制方法包括:
44.s100、所述控制器控制所述气泵向所述多腔气囊的各个腔室进行充气和排气,以使得所述多腔气囊的各个腔室依次充气和排气;
45.s200、所述控制器接收所述柔性力传感器采集的所述多腔气囊的表面对应位置的压力信息并显示所述压力信息。
46.具体地,在所述可穿戴压力治疗系统开始使用时,可以先设定一个默认初始值,所述控制器控制所述气泵向所述多腔气囊的各个腔室进行充气和排气,使得所述多腔气囊的各个腔室依次充气和排气,每次充气时腔室内的气压达到所述默认初始值。之后每次用户对所述可穿戴压力治疗系统的压力进行调节时,所述控制器控制所述气泵调节向所述多腔气囊的各个腔室进行充气和排气的气量,使得所述多腔气囊的各个腔室依次充气和排气,每次充气时腔室内的气压达到用户调节的目标值。具体可以参照后文的说明。
47.当所述多腔气囊内开始充气后,会对躯体产生挤压,躯体承受的压力值通过所述柔性力传感器被采集,所述柔性力传感器采集的所述多腔气囊的表面对应位置的压力信息后可以发送给所述控制器,所述控制器接收到所述柔性力传感器采集的数据后进行数值转换等处理并进行显示,具体地,所述可穿戴压力治疗系统中可以设置有显示屏,可以将所述柔性力传感器采集的压力信息显示在显示屏上,也可以通过通讯模块(如蓝牙模块)发送给远程设备,如手机、电脑等,在远程设备的显示屏上显示,用户可以通过显示的压力信息知晓当前躯体各位置受到的压力。
48.进一步地,用户还可以调节所述多腔气囊内的气压实现根据不同身体情况、不同治疗需要的治疗对象所受的压力进行相应调节。具体地,所述显示所述压力信息之后,还包括步骤:
49.s300、所述控制器接收压力调节指令,所述控制器根据所述压力调节指令确定对应的气压调节信息,其中,所述压力调节指令中包括目标压力;
50.s400、所述控制器根据所述气压调节信息控制所述气泵调节所述多腔气囊内的气压,以使得所述柔性力传感器采集的压力信息与所述目标压力一致。
51.当用户想要对躯体受到的压力进行调节时,可以发出压力调节指令,所述压力调节指令可以是通过所述可穿戴压力调节系统中与所述控制器通信连接的部件,如遥控器发出,也可以是通过与所述可穿戴压力调节系统中的通讯模块连接的远程设备,例如手机、电脑等发出。所述压力调节指令中包括目标压力,即用户希望躯体受到的压力值。所述控制器
根据所述压力调节指令确定气压调节信息,即反映了所述多腔气囊内的腔室的气压等应达到什么值的信息,根据所述气压调节信息控制所述气泵调节所述多腔气囊内的气压,以使得所述柔性力传感器采集的压力信息与所述目标压力一致,即躯体实际受到的压力与用户的需求一致。
52.具体地,由于身体状况的不同,对于不同的治疗对象,躯体在受压后产生的变形情况不同,所述多腔气囊内的气压与由于所述多腔气囊的挤压导致的躯体实际受到的压力可能并不是简单的相等或正比例关系,在一种可能的实现方式中,可以根据所述多腔气囊内的气压变化过程中气压与躯体受到的压力的数据来确定相应的对应关系,具体地,所述控制器根据所述压力信息调节指令确定对应的气压调节信息,包括:
53.s310、所述控制器根据所述柔性力传感器采集的压力信息以及所述多腔气囊内的气压确定所述多腔气囊内的气压与所述柔性力传感器采集的压力信息的对应关系;
54.s320、所述控制器根据所述压力调节信息对应的所述目标压力和所述对应关系确定所述气压调节信息。
55.所述控制器确定所述对应关系的过程可以是发生在所述多腔气囊内的气压发生变化的时间内,例如在所述可穿戴压力系统开始使用时,将所述多腔气囊内的气压增加至初始默认值的过程中。在所述多腔气囊内的气压变化时,所述控制器可以对所述多腔气囊内的气压值进行采样,并同时记录所述多腔气囊内的气压采样值的时刻时所述柔性力传感器采集的压力信息,进行多次采样后形成多组数据对,每组数据对包括所述多腔气囊内的气压值和对应的所述柔性力传感器采集的压力信息,对多组数据进行统计归纳,得到所述对应关系。在接收到所述压力调节信息,获取到用户需要的目标压力后,根据所述目标压力和所述对应关系来获取所述目标压力对应的多腔气囊内的气压值(可称为目标气压值),生成包括所述目标气压值的所述气压调节信息,根据所述气压调节信息控制所述气泵对所述多腔气囊进行充气或抽气,并实时获取压差传感器采集到的所述多腔气囊内的实时气压值,最终使得所述多腔气囊内的气压值达到所述目标气压值。
56.综上所述,本发明提供的一种可穿戴压力治疗系统及控制方法,在多腔气囊表面设置有柔性力传感器,可穿戴压力治疗系统中还包括控制器,控制器分别与柔性力传感器和与多腔气囊连接的气泵通信连接,从而使得控制器能够获取柔性力传感器采集的压力数据,即获取可穿戴压力治疗系统的使用端的受力反馈,控制器还可以控制气泵进而改变多腔气囊内的气压,实现根据使用端的受力反馈对压力进行相应调节。
57.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。