1.本实用新型属于建筑辅助设备及建筑板材自动化安装技术领域,尤其是涉及一种建筑板材安装机器人。
背景技术:
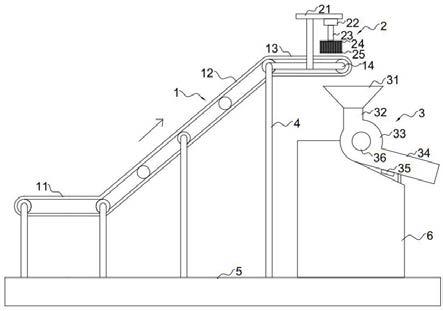
2.目前,由于办公室、教室、宿舍和实验室等场合的室内空间有限,对于室内板材(幕墙、隔板墙、天花板等)的安装无法使用吊装等手段进行,主要是由人工完成。对于重量大、大尺寸板材的安装,则需要多名建筑工人同时作业,该种方式完全依赖人工,安装过程繁琐,劳动强度大,施工安全性差,安装的质量也难以保证。为提高建筑自动化水平,国内外学者均致力于对建筑机器人的研究,并取得了一定的成效。国内对建筑机器人的研究主要集中于喷涂、焊接等工序。
3.例如申请号为201811359668.x的中国专利公开了一种室内建筑型材安装机器人机械结构,该机械结构包括底座、机械臂和安装末端;安装末端的结构复杂,增加了整个机械臂的负载,容易造成机械臂头重脚轻的现象,导致整个机械结构的重心不稳;对于不同型号大小的型材都只通过一个安装末端实现夹持,工作形式单一,适用范围有限。
技术实现要素:
4.针对现有技术问题的不足,本实用新型拟解决的技术问题是,提供一种建筑板材安装机器人。
5.本实用新型解决所述技术问题采用的技术方案是:
6.一种建筑板材安装机器人,包括底座、机械臂和安装末端,底座上安装有两个机械臂,每个机械臂的末端均连接有安装末端;其特征在于,所述两个安装末端能够单独夹持工件或两个安装末端共同夹持一个工件;
7.所述安装末端包括安装件一、第二摆动液压缸、安装件二、第三摆动液压缸、安装件三、第四摆动液压缸、夹持架和吸盘;所述安装件一固定在机械臂的末端,第二摆动液压缸安装在安装件一的一侧,第二摆动液压缸的输出轴穿过安装件一的一侧与安装件二的一侧固连,安装件二的另一侧与安装件一的另一侧铰接;第三摆动液压缸固定在安装件二上,第三摆动液压缸的输出轴与安装件三的顶部固连;第四摆动液压缸安装在安装件三的侧部,第四摆动液压缸的输出轴上安装有夹持架,夹持架的两端均安装吸盘。
8.所述机械臂包括底座连接件、第一连接件、第一摆动液压缸和多个臂杆模块;每个臂杆模块包括摆动液压缸、连杆组和端部连接件;
9.第一摆动液压缸安装在底座上,底座连接件安装在第一摆动液压缸的输出轴上;第一连接件安装在底座连接件上,第一个臂杆模块的连杆组的一端与第一连接件的一侧铰接,第一个臂杆模块的摆动液压缸的一端与第一连接件的一侧固连;第一个臂杆模块的连杆组的另一端、第一个臂杆模块的摆动液压缸的另一端与第一个臂杆模块的端部连接件的一侧铰接;
10.下一个臂杆模块的连杆组的一端与上一个臂杆模块的端部连接件的一侧铰接,下一个臂杆模块的摆动液压缸的一端与上一个臂杆模块的端部连接件的一侧固连;下一个臂杆模块的连杆组的另一端、下一个臂杆模块的摆动液压缸的另一端与下一个臂杆模块的端部连接件的一侧铰接;安装末端与最后一个臂杆模块的端部连接件固连。
11.所述机械臂包括三个臂杆模块,臂杆模块一包括第一连杆组、第一伸缩液压油缸和第二连接件,臂杆模块二包括第二连杆组、第二伸缩液压缸和第三连接件,臂杆模块三包括第三连杆组、第三伸缩液压缸和第四连接件;
12.所述第一连杆组、第二连杆组和第三连杆组的结构相同,均由四根平行且等长的连杆构成;第一连杆组的一端与第一连接件的一侧铰接,第一连杆组的另一端与第二连接件的一侧铰接;第二连杆组的一端与第二连接件的另一侧铰接,第二连杆组的另一端与第三连接件的一侧铰接;第三连杆组的一端与第三连接件的另一侧铰接,第三连杆组的另一端与第四连接件铰接;所述第一伸缩液压缸的一端与第一连接件的上部固连,另一端与第二连接件和第一连杆组连接的一侧的下部铰接;第二伸缩液压缸的一端与第二连接件和第二连杆组连接的一侧的下部固连,第二伸缩液压缸的另一端与第三连接件和第二连杆组连接的一侧的下部铰接;第三伸缩液压缸的一端与第三连接件和第三连杆组连接的一侧的上部固连,第三伸缩液压缸的另一端与第四连接件的下部铰接。
13.所述第一连接件由一个四边形底板、两个不规则六边形板和两根圆柱轴组成;两个不规则六边形板焊接在四边形底板的两侧,两根圆柱轴的两端分别与两个不规则六边形板固连,两根圆柱轴分别位于第一连接件的上、下部。
14.所述第二连接件和第三连接件的结构相同,均由两个梯形板和四根等长的圆柱连杆组成;两个梯形板固定在四根圆柱连杆的两端,四根圆柱连杆分别位于梯形板的四个端角处。
15.所述第四连接件包含一个l形板、两个直角梯形板和两根圆柱形轴;两个直角梯形板焊接在l形板的两侧,两根圆柱形轴的两端与两根直角梯形板固连,两根圆柱形轴位于直角梯形板的斜边上。
16.所述夹持架包括连接板、直连杆和不规则连杆;连接板与第四摆动液压缸的输出轴固连,连接板的两侧分别安装有不规则连杆,两个不规则连杆的两端分别与各自的直连杆连接;每个直连杆的两端分别安装有吸盘。
17.所述不规则连杆由一个直杆经过两次折弯形成,每次折弯60
°
,使得不规则连杆呈凹型结构。
18.所述安装件一包括一个基板和两个位于基板两侧的侧板,使安装件一呈双耳型;第二摆动液压缸安装在安装件一的一个侧板上,第二摆动液压缸的输出轴穿过安装件一的侧板与安装件二的一侧固连,安装件二的另一侧与安装件一的另一个侧板铰接。
19.所述安装件三呈l型,包括一个竖直板和水平板;安装件二包括一个u型板和一个位于u型口内的顶板;第三摆动液压缸固定在安装件二的顶板的底部,第三摆动液压缸的输出轴穿过安装件二的顶板与安装件三的水平板固连;第四摆动液压缸与安装件三的竖直板固连,第四摆动液压缸的输出轴穿过安装件三的竖直板与夹持架的中部固连。
20.与现有技术相比,本实用新型的有益效果是:
21.1.该机器人包含两个机械臂,两个机械臂可以同时夹持一个较大尺寸的板材,也
可以单独夹持较小尺寸的板材,使用方式更加灵活,工作效率更高,适用范围更广。
22.2.所有动作采用液压驱动实现,提高了机械臂的承载能力,可适用于各种环境下的板材安装作业,具有安全性能好,工作效率高,承载能力大,劳动强度低等优点,尤其适用于室内大尺寸、大重量的隔墙板的安装,实现了板材安装的机械化,极大地减少了对施工人员的数量要求,减少了施工人员的工作负担,操作简单、运作顺畅省力、高效安全。
23.3.该机器人与现有的建筑机器人相比,有着占用空间小,适用场景更为广泛、实用性更强等优点。所有液压缸的供油设备安装在底盘上,使得机器人的重心在底盘上,避免机器人在重载条件下移动过程中可能会发生的倾覆问题,提高了机器人安装作业过程中的安全性。机器人通过履带实现移动,进一步增加了稳定性。安装末端在不降低结构强度的基础上进行了轻量化的机构设计,提升了机械臂的负载能力。综上所述,该机器人具有更加安全、灵活、高效、结构强度大、负载与自重比高等优点,实现了对室内板材的辅助安装及自动化安装,提高了生产效率,降低了工人的劳动强度,提高了施工安全性。
附图说明
24.图1为本实用新型一种实施例的整体结构示意图;
25.图2为本实用新型一种实施例的底座的结构示意图;
26.图3为本实用新型一种实施例的机械臂的结构示意图;
27.图4为本实用新型一种实施例的安装末端的结构示意图;
28.图5为本实用新型一种实施例的两个安装末端夹持一个型材的状态示意图;
29.图中:1、底座;2、机械臂;3、安装末端;
30.101、底座本体;102、控制柜,103、左履带;104、右履带;
31.201、第一摆动液压缸;202、底座连接件;203、第一连接件;204、第一连杆组;205、第一伸缩液压缸;206、第二连接件;207、第二连杆组;208、第二伸缩液压缸;209、第三连接件;210、第三连杆组;211、第三伸缩液压缸;212、第四连接件;
32.301、安装件一;302、第二摆动液压缸;303、安装件二;304、第三摆动液压缸;305、安装件三;306、第四摆动液压缸;307、夹持架;308、吸盘;
33.307
‑
1、连接板;307
‑
2、直连杆;307
‑
3、不规则连杆。
具体实施方式
34.下面结合实施例及附图进一步解释本实用新型的技术方案,但并不用于限定本技术的保护范围。
35.如图1所示,本实用新型为一种建筑板材安装机器人(简称机器人,参见图1
‑
5),包括底座1、机械臂2和安装末端3,底座1上安装有两个机械臂2,每个机械臂2的末端均连接有安装末端3;
36.如图2所示,所述底座1包括底座本体101、控制柜102、左履带轮组103和右履带轮组104;左履带轮组103和右履带轮组104安装在底座本体1底部的两侧,机器人的所有液压缸的供油设备安装在底座本体1上,增加了机器人的稳定性;控制柜102安装在底座本体101上,控制柜102用于控制机器人各部件的协调运动。
37.如图3所示,机械臂2包括底座连接件202、第一摆动液压缸201、第一连接件203、第
一连杆组204、第一伸缩液压油缸205、第二连接件206、第二连杆组207、第二伸缩液压缸208、第三连接件209、第三连杆组210、第三伸缩液压缸211和第四连接件212;
38.所述底座连接件202由一个四边形板与回字形板焊接组成,四边形板位于回字形板的底部;四边形板的中心开有圆孔;第一摆动液压缸201的输出轴插接在四边形板的圆孔中,将第一摆动液压缸201的输出轴与四边形板固连;第一摆动液压缸201的缸筒安装在底座本体101上;
39.所述第一连接件203由一个四边形底板、两个不规则六边形板和两根圆柱轴组成;两个不规则六边形板焊接在四边形底板的两侧,两根圆柱轴的两端分别与两个不规则六边形板固连,两根圆柱轴分别位于第一连接件203的上、下部;第一连接件203的四边形底板与底座连接件201的回字形板固连;
40.所述第二连接件206和第三连接件209的结构相同,均由两个梯形板和四根等长的圆柱连杆组成;在两个梯形板之间固定四根圆柱连杆,四根圆柱连杆分别位于梯形板的四个端角处;
41.所述第四连接件212包含一个l形板、两个直角梯形板和两根圆柱形轴;两个直角梯形板焊接在l形板的两侧,两根圆柱形轴的两端与两根直角梯形板固连,即两根圆柱形轴连接两个直角梯形板,两根圆柱形轴位于直角梯形板的斜边上;所有圆柱轴、圆柱形轴、圆柱连杆均空间平行;
42.所述第一连杆组204、第二连杆组207和第三连杆组210的结构相同,均由四根平行且等长的连杆构成;第一连杆组204的一端与第一连接件203的两根圆柱轴铰接,第一连杆组204的另一端与第二连接件206一侧的两根圆柱连杆铰接;
43.第二连杆组207的一端与第二连接件206另一侧的两根圆柱连杆铰接,第二连杆组207的另一端与第三连接件209一侧的两根圆柱连杆铰接;第三连杆组210的一端与第三连接件209另一侧的两根圆柱连杆铰接,第三连杆组210的另一端与第四连接件212的两根圆柱形轴铰接;
44.所述第一伸缩液压缸205的一端与第一连接件203上部的圆柱轴固连,另一端与第二连接件206和第一连杆组204连接的一侧的下部的圆柱连杆铰接;
45.第二伸缩液压缸208的一端与第二连接件206和第二连杆组207连接的一侧的下部的圆柱连杆固连,第二伸缩液压缸208的另一端与第三连接件209和第二连杆组207连接的一侧的下部的圆柱连杆铰接;
46.第三伸缩液压缸211的一端与第三连接件209和第三连杆组210连接的一侧的上部的圆柱连杆固连,第三伸缩液压缸211的另一端与第四连接件212下部的圆柱形轴铰接;
47.通过第一摆动液压缸201实现底座连接件202的水平旋转运动,进而实现机械臂的水平转动;第一伸缩液压缸205伸缩,使第一连杆组204相对于第一连接件203转动;第二伸缩液压缸208伸缩,使第二连杆组207相对于第二连接件206转动;第三伸缩液压缸211伸缩,使第三连杆组210相对于第三连接件209转动;通过三个伸缩液压缸的共同作用,实现机械臂的伸缩运动;第一摆动液压缸201、第一伸缩液压油缸205、第二伸缩液压缸208、第三伸缩液压缸211均与控制柜102电连接。机械臂可以模块化,第一连杆组204、第一伸缩液压缸205和第二连接件206构成一个模块。
48.所述安装末端3包括安装件一301、第二摆动液压缸302、安装件二303、第三摆动液
压缸304、安装件三305、第四摆动液压缸306、夹持架307和吸盘308;
49.所述安装件一301包括一个基板和两个位于基板两侧的侧板,使安装件一301呈双耳型;安装件一301的基板与第四连接件212的竖直侧面固连;安装件二303包括一个u型板和一个位于u型口内的顶板;第二摆动液压缸302安装在安装件一301的一个侧板上,第二摆动液压缸302的输出轴穿过安装件一301的侧板与安装件二303的u型板的一侧固连,安装件二303的u型板的另一侧通过销轴与安装件一301的另一个侧板铰接,通过第二摆动液压缸302实现安装件二303的俯仰运动;
50.安装件三305呈l型,包括一个竖直板和水平板;第三摆动液压缸304固定在安装件二303的顶板的底部,第三摆动液压缸304的输出轴穿过安装件二303的顶板与安装件三305的水平板固连,通过第三摆动液压缸304实现安装件三305绕第三摆动液压缸304输出轴的转动;第四摆动液压缸306与安装件三305的竖直板固连,第四摆动液压缸306的输出轴穿过安装件三305的竖直板与夹持架307的中部固连,通过第四摆动液压缸306实现夹持架307在竖直方向内的转动;夹持架307的两端分别安装有两个吸盘308,用于吸附板材;吸盘308通过外部气动系统提供吸附力,图中未画出;第二摆动液压缸302、第三摆动液压缸304、第四摆动液压缸306均与控制柜102电连接。
51.所述夹持架307包括连接板307
‑
1、直连杆307
‑
2和不规则连杆307
‑
3;连接板307
‑
1与第四摆动液压缸306的输出轴固连,连接板307
‑
1的两侧分别焊接有不规则连杆307
‑
3,两个不规则连杆307
‑
3的两端分别与各自的直连杆307
‑
2焊接;每个直连杆307
‑
2的两端分别安装有吸盘308。不规则连杆307
‑
3由一个直杆经过两次折弯形成,每次折弯60
°
,使得不规则连杆307
‑
3呈凹型结构。
52.本实用新型的工作原理和工作流程是:
53.安装室内隔墙板工作开始之前,控制柜102控制机器人运动至工作位置;启动第一摆动液压缸201,控制整个机械臂2在水平面内的转动;第一伸缩液压油缸205、第二伸缩液压缸208、第三伸缩液压缸211工作,实现机械臂的伸缩运动,将安装末端3移动至指定位置;然后通过第二摆动液压缸302实现安装件二303的俯仰运动,通过第三摆动液压缸304实现安装件三305绕第三摆动液压缸304输出轴的转动,通过第四摆动液压缸306实现夹持架307在竖直方向内的转动,进而实现夹持架307在360
°
范围内的位置调整,使吸盘308吸附板材;
54.然后调整机械臂的位置,将板材送至待安装位置;然后再次调整夹持架307的位置,将板材调整至与待安装位置完全重合,工人即可通过焊接、粘接等方式完成板材的安装工作。
55.两个机械臂2可以单独使用,分别夹持较小的板材;两个机械臂2也可以一起使用,构成并联机器人,用于夹持同一个较大的板材。
56.本实用新型未述及之处适用于现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。