本实用新型涉及救生技术领域,尤其是一种智能救灾机器人。
背景技术:
火灾每年要夺走成千上万人的健康和生命,并造成数以亿计的经济损失。在这样的灾害面前,救灾机器人得到了越来越多的关注,但是,在现有技术中,受限于地形复杂及通道窄小,救灾机器人很难进行有效地运动,同时也不能够精确及时地扑灭隐蔽火源和搜救幸存者,这会延长救援所用的时间,降低生还者获救的几率。
技术实现要素:
有鉴于此,本实用新型提供一种智能救灾机器人,该智能救灾机器人能够较为快捷地在复杂地形中行走,缩短救援时间,保障救援人员安全。
本实用新型提供了一种智能救灾机器人,包括机体、行进机构、爬坡辅助机构及控制单元,所述行进机构及所述爬坡辅助机构均设置于所述机体上,且与所述控制单元电性相连,所述爬坡辅助机构包括导杆及行星车轮组件,所述导杆的一端与所述机体相连,并朝远离所述机体的方向倾斜向下延伸,所述行星车轮组件包括行星轮、连接杆及转盘,所述行星轮有多个,每个行星轮通过一连接杆与所述转盘相连,多个所述行星轮沿以所述转盘的中心为圆心的圆的周向布设,所述转盘可转动地设置于所述导杆远离所述机体的一端上,所述行星车轮组件还包括第一电机、所述第一电机与所述转盘相连,并控制所述转盘转动,以在遇到障碍物时改变所述机体的仰角,所述行进机构控制所述智能救灾机器人的行进。
进一步地,所述导杆可转动地设置于所述机体上,在导杆与所述机体连接的一端上还设置有第一齿轮,在所述机体上还设置有可转动的第二齿轮,所述第一齿轮与所述第二齿轮啮合,所述第二齿轮与第二电机相连,所述第二电机控制所述第二齿轮转动。
进一步地,所述行进机构包括主动轮、从动轮及绕设于所述主动轮及从动轮上的履带,所述主动轮与第三电机相连,所述第三电机带动所述主动轮转动。
进一步地,所述从动轮有多个,在位于底面一侧的所述从动轮上还设置有弹性支架。
进一步地,所述智能救灾机器人包括探测装置及对火源进行灭火的灭火装置,所述探测装置及所述灭火装置与所述控制单元相连,在所述探测装置探明火源的位置后,所述控制单元控制所述灭火装置进行灭火。
进一步地,所述探测装置包括确定火源中心位置及火源半径的火焰传感器及红外温度传感器。
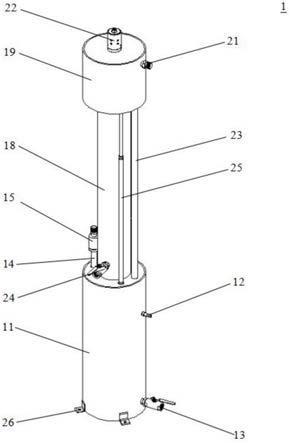
进一步地,所述灭火装置包括灭火罐、管体、灭火喷头、灭火器开关及转向舵机,所述灭火罐固定于所述机体上,所述管体的一端与所述灭火罐相连,另一端设置有灭火喷头,所述灭火器开关对所述灭火器的开启及关闭进行控制,所述转向舵机设置于所述机体上,并与所述管体相连,所述转向舵机通过对所述管体的弯折,改变所述灭火喷头的朝向。
进一步地,所述救灾机器人还包括摄像头及支架,所述支架设置于所述机体上,所述摄像头设置于所述支架远离所述机体的一端,所述摄像头有多个,且分别朝向不同方向。
进一步地,所述探测装置还包括探测生命的生命探测仪、探测障碍物或火源距离的距离探测仪,和/或对危险气体进行探测的气体传感器。
进一步地,所述智能救灾机器人还包括对自身位置进行定位的定位模块,以及传递信息的无线传输模块。
综上所述,本实用新型通过爬坡辅助机构及行进机构的设置,当救灾机器人遇到障碍物时,行进机构控制机器人行进,将其中一个行星轮搭设到障碍物上,第一电机带动行星车轮组件转动,行星轮在向下转动的同时,会对机体产生一个向上的反作用力,与此同时行进机构向前运动,在行星车轮组件及行进机构的相互作用下,机体会向上仰起,继而使得行进机构越过障碍物,以使该智能救灾机器人能够较为快捷地在复杂地形中行走。当探测到火源时,智能救灾机器人进行自动灭火,从而缩短救援时间,保障救援人员安全。进一步地,通过各传感器的配合,能够使得救灾人员更好地对灾情进行分析,从而进行更准确的救援。
上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
图1为本实用新型实施例提供的智能救灾机器人的轴侧结构示意图。
图2为图1中智能救灾机器人的侧视结构示意图。
图3为图1中智能救灾机器人的前视结构示意图。
图4为图1中智能救灾机器人的俯视结构示意图。
图5为图1中智能救灾机器人的后视结构示意图。
图6为图1中智能救灾机器人的仰视结构示意图。
图7为智能救灾机器人的系统框图。
具体实施方式
为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,详细说明如下。
本实用新型提供一种智能救灾机器人,该智能救灾机器人能够较为快捷地在复杂地形中行走,缩短救援时间,保障救援人员安全。
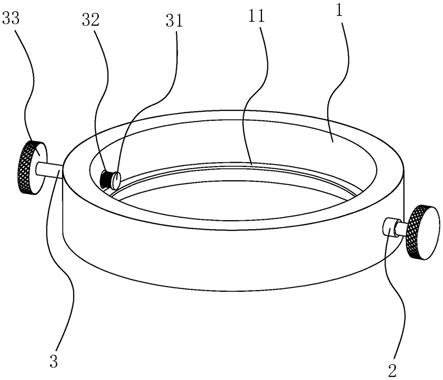
图1为本实用新型实施例提供的智能救灾机器人的轴侧结构示意图,图2为图1中智能救灾机器人的侧视结构示意图,图3为图1中智能救灾机器人的前视结构示意图,图4为图1中智能救灾机器人的俯视结构示意图,图5为图1中智能救灾机器人的后视结构示意图,图6为图1中智能救灾机器人的仰视结构示意图,图7为智能救灾机器人的系统框图。如图1至图7所示,本实用新型实施例提供的智能救灾机器人包括机体10、行进机构20、爬坡辅助机构30、探测装置40、灭火装置50及控制单元90。上述的行进机构20、爬坡辅助机构30、探测装置40及灭火装置50均设置于机体10上,控制单元90与行进机构20、爬坡辅助机构30、探测装置40及灭火装置50电性相连,该爬坡辅助机构30包括导杆31及行星车轮组件32,导杆31的一端与机体10相连,并朝远离机体10的方向倾斜向下延伸。行星车轮组件32包括行星轮321、连接杆322及转盘323,行星轮321有多个,每个行星轮321通过一连接杆322与转盘323相连,多个行星轮321沿以转盘323的中心为圆心的圆的周向布设,转盘323可转动地设置于导杆31远离机体10的一端上,行星车轮组件32还包括第一电机324,第一电机324与转盘323相连,并控制转盘323的转动。行进机构20带动救灾机器人运动,探测装置40探测火源的位置,并将其传递至控制单元90,在探测到火源后,控制单元90启动灭火装置50进行灭火。
在本实施例中,通过爬坡辅助机构30及行进机构20的设置,当救灾机器人遇到障碍物时,行进机构20控制机器人行进,将其中一个行星轮321搭设到障碍物上,第一电机324带动行星车轮组件32转动,行星轮321在向下转动的同时,会对机体10产生一个向上的反作用力,与此同时行进机构20向前运动,在行星车轮组件32及行进机构20的相互作用下,机体10会向上仰起,继而使得行进机构20带动智能救灾机器人越过障碍物,以使该智能救灾机器人能够较为快捷地在复杂地形中行走。当探测到火源时,智能救灾机器人进行自动灭火,从而缩短救援时间,保障救援人员安全。
进一步地,导杆31可转动地设置于机体10上,在导杆31与机体10连接的一端设置有第一齿轮325,在机体10上还设置有可转动的第二齿轮326,第一齿轮325与第二齿轮326啮合,第二齿轮326与第二电机327相连,第二电机327控制第二齿轮326转动。第二电机327通过第二齿轮326带动第一齿轮325转动,以改变导杆31与水平面的夹角。通过改变导杆31与水平面的夹角,可以增大机器人的爬坡最大仰角,提高机器人穿越障碍的能力。
进一步地,在本实施例中,爬坡辅助机构30可以为两个,分别设置于机体10的两侧,以保证机器人爬坡时的受力平衡。与之相应的,第二齿轮326也可以为两个。
进一步地,行进机构20包括主动轮21、从动轮22及绕设于主动轮21及从动轮22外的履带23。从动轮22可以为多个,在位于地面一侧的从动轮22上,还设置有弹性支架24。通过履带23式行进机构20的设置,能够增大机器人越过障碍物的能力。主动轮21与第三电机25相连,第三电机25为行进机构20提供动力。第三电机25可以为带减速机构的直流电机。控制单元90通过pwm对机体10两侧的第三电机25的转速分别进行调节,以产生速度差进行转向及转弯控制。第三电机25的电压可以为12v,减速比1:100,输出最大扭矩1.0n.m,输出转速15rpm-20rpm。
进一步地,探测装置40包括火焰传感器41及红外温度传感器42,如flamesensor(火焰传感器),及mlx90614-bcc非接触式红外温度传感器。通过红外温度传感器得出最高温度点,结合火焰传感器确定火源中心位置,继而计算出火源的半径。
灭火装置50包括灭火罐51、管体52、灭火喷头53、灭火器开关54及转向舵机55,灭火罐51固定于机体10上,管体52的一端与灭火罐51相连,另一端设置有灭火喷头53,灭火器开关54对灭火装置50的开启与关闭进行控制,转向舵机55设置于机体10上,并与管体52相连,通过对管体52的弯折,以实现对灭火喷头53的朝向进行控制。
进一步地,智能灭火机器人还包括摄像头61及升降支架62,升降支架62设置于机体10上,摄像头61设置于升降支架62远离机体10的一端上,摄像头61有多个,且分别朝向不同的方向。
进一步地,探测装置40还包括生命探测仪43,具体可以为红外生命探测器和/或雷达生命探测器。以寻找火灾中的生命体。具体地,生命探测仪43可以通过检测人体生命活动所引起的各种微动,从这些微动中得到呼吸、心跳的有关信息,从而对生命体进行辨识。其中雷达生命探测器可以不受温度、湿度、噪音、场地地形等因素的影响,电磁信号连续发射机制更增加了其区域性侦测的功能,具有抗干扰能力强,穿透能力强,探测定位准确等的优点。
进一步地,探测装置40还包括距离探测仪44,距离探测仪44可以包括超声波测距传感器和/或红外线传感器。超声波测距传感器可以位于机器人的正前方,具体包括超声波发射器和超声波接收器,通过对超声波的发射及接收时间差和超声波传播速度,可以计算出机器人与当前障碍物之间的距离,以提前准备避让或通过爬坡辅助机构30越过该障碍物。红外线传感器同样可以基于红外线信号发射及接收的时间差及红外线传播速度,计算出前方障碍物的距离,以及火源与机体10之间的距离。
进一步地,探测装置40还包括对一氧化碳、甲烷及液化石油气等危险气体进行检测的气体传感器45,如analoggassensor(模拟气体传感器)(mq9)。
进一步地,智能救灾机器人还包括对自身位置进行定位的定位模块46,以及传递信息的无线传输模块71,无线传输模块71将各传感器的检测信息及自身的位置信息传递给救灾人员,已使救灾人员进行更好地救灾工作。
综上所述,本实用新型通过爬坡辅助机构30及行进机构20的设置,当救灾机器人遇到障碍物时,行进机构20控制机器人行进,将其中一个行星轮321搭设到障碍物上,第一电机324带动行星车轮组件32转动,行星轮321在向下转动的同时,会对机体10产生一个向上的反作用力,与此同时行进机构20向前运动,在行星车轮组件32及行进机构20的相互作用下,机体10会向上仰起,继而使得行进机构20越过障碍物,以使该智能救灾机器人能够较为快捷地在复杂地形中行走。当探测到火源时,智能救灾机器人进行自动灭火,从而缩短救援时间,保障救援人员安全。进一步地,通过各传感器的配合,能够使得救灾人员更好地对灾情进行分析,从而进行更准确的救援。
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。