本发明属于消防救援机器人技术领域,更为具体地,涉及一种基于箱体的室内火灾救人消防机器人,该机器人主要应用于室内火灾救人。
背景技术:
随着社会发展,高楼越来越多,并且采用了大量可燃材料,高楼火灾也日益增多。在火势过猛的情况下,消防人员不能贸然进入火场,尤其是高楼和化工厂的火灾,很多情况下无计可施。火灾发生时,普通的消防车、云梯车往往会受到作业空间限制,难以开展工作。火场的杂物和随时坠落的天花板等,极大阻碍了消防人员和消防机器人开展救援。火场中易燃易爆物品,目前一般由消防人员手动移除清理,一旦爆炸,后果不堪设想。
在火灾发生后,行动不便的老人、小孩、孕妇很难及时转移,相当一部分人选择往更高层跑,但火往高处烧,如不能将其及时救出,其必然会再次陷入火海;还有一大部分人选择躲在狭小空间,但浓烟无孔不入,非常难保证所躲藏的空间完全密封,而且局部爆燃容易把门窗烧穿,长期在密闭空间也会窒息死亡;还有一小部分人甚至会选择跳楼博取生机,跳楼成功率相当低,即使生还也容易摔成伤残,因此,必须让这些被困者尽快撤离火场。
在火灾侦查上,及时采集火场温度、烟雾浓度、着火点分布等火场信息,让救援人员对火场内部状况有更加直观深入的了解,对制定正确的灭火方案和营救方案具有极其重要的意义。
救援机器人,特别是火灾救援机器人,一直是国内外专家学者重点研发领域。但是绝大部分都是拖曳水管式的室外灭火消防机器人,不能像消防队员一样实现多情况救援,很多救援任务都得由消防员完成。该类机器人由于自身缺点限制只能实现室外灭火,更不用说进入室内火场救人。
救人机器人要在火场中要应对高温热辐射、浓烟、爆炸危险、可燃物爆燃、天花板和墙体坠落、地面的杂乱、定位困难、通讯困难等关键难题,对机器人的救人工作产生巨大阻碍,而室外的火场条件就远没有那么糟糕和困难了,因此已有的火灾救人机器人绝大多数只是应用于室外火场外围救援。
目前世界各国消防机器人都关注于灭火,直接救人方面的研究相对较少,灭火机器人种类挺多,但目前世界上还没有一款能真正用于室内火灾直接救人的消防机器人,在以人为本的社会,生命高于一切,该类救人机器人的研究迫在眉睫。
现在的楼房里基本都配有消防栓,能给消防机器人提供水源,着火时可利用着火层的下一层水源灭火。但目前消防机器人大多数是拖拽水管灭火,其最大弊端就是水管易弯折和水管与地摩擦力太大,导致无法通水,也使拖拽的水管长度十分有限。还有的是携带储水罐的灭火机器人,但其储水量较小,且在上下楼梯时内部的水会倾向后侧,易导致重心不稳而翻车。此外还有干粉灭火机器人,但其搭载的干粉少,且需特制的干粉罐,难以快速更换。
基于上述情况,世界研究出了少数具有救人功能的机器人,但其室内救援效果均不是很不理想,尤其是在室内火灾救人方面。例如日本的多功能救援机器人roboticcrawler“棺材机器人”和minirobocue机器人,roboticcrawler是半敞开式的,火场中阻挡不了烟雾,其箱体跟履带固定不能在上下楼梯时使载人的箱体保持水平;minirobocue则是利用传送带和机械臂把人装进箱体,但是其太过庞大、价格太过昂贵、操控困难而且机械臂容易把人弄伤,这就极大地限制了其救援应用范围。
总之,虽然国内外也曾有极少数室内火灾救人机器人出现,但是其技术方案相当不成熟不可靠,存在体积大、难以发现被困者、难让人保持水平、救援速度慢、安全性低、电池难更换、氧气供给难等缺点和问题,使得至今没有一款能真正应用于室内火灾救人的机器人。
技术实现要素:
鉴于上述问题,本发明的目的是提供一种基于箱体的室内火灾救人消防机器人,用于解决现有消防机器人无法进入火灾现场的大难题,尤其是解决现有火灾救人机器人对机器人自身和被救者的防护性差、被救者在救援机器人中颠簸、在上下楼梯时无法让人保持水平等难题,为火灾等救援技术领域提供新思路,提高快速发现和拯救被困者的可能性,实现救援工作的智能高效、安全可靠,以克服上述现有技术的不足。
本发明提供的基于箱体的室内火灾救人消防机器人包括:用于行走驱动的金属履带底盘、用于运载人的具有复合夹层防护的箱体、用于箱体水平衡调节的智能悬架、位于箱体顶部用于收放水管的自动水管卷筒;
所述金属履带底盘包括:金属履带底盘骨架,以及安装在金属履带底盘骨架上的履带、底箱、防护盖层、支撑架,其中底箱的底部、两条履带的两侧和顶部均由第一复合夹层包围,所述第一复合夹层按从外到内其结构组成依次为:高反光金属箔片、不锈钢薄板、含锆陶瓷纤维隔热棉、铝箔、含锆陶瓷纤维隔热棉、铝合金板,每条履带的前端、后端分别设置有履带水喷头,第一复合夹层和履带水喷头,用于履带的高温防护;两条履带中间为底箱,底箱由底箱壁和底箱顶围成封闭空间,底箱壁和底箱顶由第一复合夹层构成;
所述底箱内设置有驱动履带底盘行进的行走电机、用于给整机供电的电源、用于给液压推杆提供动力的电动液压泵、用于收放支撑架的卷扬机、用于给被救者供氧的供氧单元、用于控制整机运行的控制箱;
所述行走电机周围设置有电机冷却水罩,所述电机冷却水罩由内外壳构成,中间为冷却水层,利用流动水带走热量进行行走电机的散热;所述电源的总开关由远程遥控的电源控制接触器控制,用于防止局部线路发生故障时能及时切断总电源,避免整机烧毁;所述卷扬机具有收放钢索的功能,通过卷扬机收放钢索来控制支撑架的自动收放;所述供氧单元采用氧气瓶作为氧气源,通过外加隔热材料的金属导气管引到箱体内的氧气面罩,其中导气管中间设置电磁阀控制氧气的开闭,箱内上设置有单向阀,使得被救者能从箱体内排除废气而外界气体不能进入,利用该供氧单元对被救者的氧气供给;所述底箱盖为可拆卸结构;所述底箱盖前半部段为可翻转的翻盖板,翻盖板前端通过门鼻子与底箱连接;
所述防护盖层位于履带底盘最顶部,且通过钢丝与底盘上部固联形成可拆卸结构,防护盖层由含锆陶瓷纤维隔热棉和高反光金属箔片构成,高反光金属箔片将含锆陶瓷纤维隔热棉包裹,防火隔热,利用底箱两侧的履带、防护盖层和第一复合夹层对底箱防护;
所述支撑架位于履带底盘前部的下方,支撑架顶部与底盘骨架铰接,可绕着铰接座在前后方向上转动,支撑架底部设置有金属轮,支撑架与一根钢索的两端固连,该钢索经过定滑轮由卷扬机牵拉,支撑架、钢索、卷扬机形成闭环,用于牵引支撑架转动自动收放,所述支撑架在机器人经过楼梯斜面与平面相交突变的拐点放下,由铰接的限位拉杆对放下的最大角度进行限位,支撑架给予履带底盘支撑,使该过度过程平稳,避免了瞬间冲击;
所述箱体包括箱体本体、履带裙板、姿势提示图、箱门、托板、干粉灭火器、角顶板;箱体主要用于运载被救者;所述箱体本体和箱门以铝合金为主体材料,以铝合金桁架为箱体骨架,采用第二复合夹层作为防护,形成封闭空间;所述第二复合夹层按从外到内其结构组成依次为:高反光金属箔片、不锈钢薄板、含锆陶瓷纤维隔热棉、铝箔、金属冷却细管、铝箔、含锆陶瓷纤维隔热棉、铝合金板、橡塑保温软垫,所述第二复合夹层用于增加结构强度和隔热性能;其中,所述高反光金属箔片由具有高熔点、高反光率的金属材料制成,作为最外层能直接反射掉大量热辐射;不锈钢薄板作为外层壳体;含锆陶瓷纤维隔热棉由含锆陶瓷纤维制成;铝箔位于金属冷却细管的两侧;铝合金板作为内层壳体;橡塑保温软垫位于箱体最内层;
所述履带裙板位于箱体下部两侧,与箱体侧壁固定,由不锈钢薄板构成,机器人在平面上时履带裙板能盖住外侧,当机器人上下楼梯时履带裙板能盖住箱体与底盘间的大部分间隙,有效防止热浪冲击底箱;
所述姿势提示图粘贴于箱体内壁,用来提示钻进箱体内的被困者应该采取蜷曲侧躺的姿势,蜷曲侧躺在箱体相对稳定,且有利于降低整机重心;
所述箱门位于机器人前部,箱门通过开关门机构和门锁止机构进行开合和锁止,所述箱门和箱体主体后部为尖三角形状,有利于撞开门和阻挡在前方的障碍物,箱门通过合页与箱体本体铰接;所述开关门机构以电推杆作为动力,电推杆做伸缩运动,驱动曲柄摇杆机构中的摇杆做摆转运动,通过连杆牵拉作为曲柄的箱门做旋转运动,检测到人要钻入箱体时自动打开箱门,钻入箱体后自动关闭箱门;门锁止机构包括锁头和锁孔,锁头设置于箱体内侧壁的前端位置,锁头上的楔形锁杆可自动伸缩,开门时锁杆缩回与锁孔脱离,关门后楔形的锁杆伸长与锁孔实现锁合,并且楔形锁杆伸长时会压迫锁孔向里运动实现箱门的扣紧;
所述可滑出式托板设置于箱体内部底面,主体为铝合金材料,托板上表面粘贴有橡塑保温软垫,被救者蜷曲侧躺在上面,被救者在被本机器人救出火场后,通过该托板能把被救者从箱体快速移出;
所述小型干粉灭火器设置于箱体内角落位置,该干粉面粉灭火器通过金属波纹管与干粉电磁阀相连,干粉电磁阀作为开管控制干粉是否喷射,且干粉电磁阀通过金属波纹管与机器人顶部的干粉喷头相连,干粉喷头具有两自由度,可在水平面上和竖直平面上旋转,在火场中突发爆燃情况,威胁到救人机器人,控制打开该干粉灭火器进行紧急灭火保护;
呈三角状的所述角顶板固定于箱体顶部,内侧以铝合金桁架为支撑骨架,外侧为不锈钢薄板,整体呈三角尖顶状,角顶板顶部位置设置有摄像头防护罩,摄像头防护罩通过防护罩底座跟箱体顶部固定,包括金属笼、钢化玻璃夹层,两层钢化玻璃中间夹层通水构成防护水层,水从夹层底部流入从顶部流出,摄像头防护罩内设置由可见光摄像头和红外摄像头构成的组合摄像头,摄像头防护罩内的组合摄像头底部设置有led照明灯提供照明;
悬架包括一对前悬架和一对后悬架,所述前悬架由一组对称的弹簧减震器构成,其底端与底盘骨架焊接固定,上端与箱体底部铰接;所述后悬架由两组板簧减震器和两组电动液压推杆构成,板簧减震器与箱体连接固定,板簧减震器下部通过铰接支座跟电动液压推杆上部铰接,电动液压推杆底部通过铰支座与底盘骨架铰接,悬架跟箱体采用四点铰接方式,用于箱体的快速拆卸,以便快速更换履带底盘中的电池或对履带底盘中的控制元件进行调试,两组弹簧减震器和两组板簧减震器做到了四点减震,用于保证箱体运行时的平稳性;所述电动液压推杆中,由电机驱动液压泵,液压泵配合陀螺仪倾角传感器,能使其所连接的电磁换向阀对推杆伸、缩控制,使其所连接的电动节流阀对伸缩速度大小的调节,推杆的伸缩驱使箱体绕弹簧减震器上铰接点旋转,配合陀螺仪对倾角的测量和单片机反馈控制,用于箱体内的人在机器人上下楼梯过程中时刻保持水平;
所述自动水管卷筒位于箱体顶部,所述自动水管卷筒包括:卷筒骨架、万向接头、卷筒转动机构、卷筒保持架、水管紧排机构、拉管机构和自喷淋喷头,所述自动水管卷筒用于缠绕水管,完成“边走边放,边撤边收”功能;所述卷筒骨架由水管缠绕,水管一端从卷筒骨架的卷筒空心轴中穿过连接于顶部的所述万向接头,所述万向接头一端与卷筒空心轴固定,另一端与输出管相连,其两端部分可以相对转动;
所述卷筒转动机构包括止推轴承、滚珠轴承、卷筒齿轮、卷筒电机,止推轴承位于卷筒骨架底部,用于支持卷筒,滚珠轴承位于卷筒骨架顶部,用于对卷筒限位固定,一对卷筒齿轮其中之一与卷筒空心轴固联,另外一个与卷筒电机通过联轴器固联,卷筒电机上有第一复合夹层防护,卷筒电机通过啮合的卷筒齿轮带动卷筒骨架转动,在机器人后退时给予水管向内回收的拉力;
所述卷筒保持架通过螺栓与箱体固定,并通过轴承与卷筒骨架保持相对位置关系,所述卷筒骨架能够相对卷筒保持架转动,保持架上固定有不锈钢薄板包围和保护着卷筒;
所述水管紧排机构为竖立的丝杠螺母机构,位于卷筒骨架的边缘、箱体顶部后方,丝杠支架与保持架固定,螺母上固连着通管环,水管从通管环中通过,位于卷筒顶部的丝杠电机转动,丝杠电机上有第一复合夹层防护,通过丝杠驱动螺母上的通管环来回做上下移动,进而带动水管做上下移动,配合机器人行进速度,做到水管在收回时能够一层层紧密排列,节省空间,在释放时能够一层层按顺序释放;
所述拉管机构位于水管紧排机构之后,在机器人前进时给予水管向外释放的拉力,拉管机构包括一对中间细两端粗的压轮,水管从压轮中间穿过受其挤压,压轮表面粗糙,靠摩擦力牵引水管,其一端与一对啮合的拉管齿轮固联,压轮和拉管齿轮均架设在拉管架上,拉管电机上有第一复合夹层防护,其与其中一齿轮固联,通过拉管齿轮驱动一对压轮作相对转动,从而牵拉水管向外运动;
所述自喷淋喷头位于水管卷筒顶部,并与卷筒保持架固定,其为坚硬的金属材质,顶部尖锐,从自喷淋喷头喷出的水能均匀的喷洒到机器人顶部,沿着侧壁自上向下流动对机器人进行再次冷却。
作为本发明的优选结构,所述水管包括消防软水带和半硬质的不锈钢编织管,消防软水带作为前段水管,在未进入火场前就释放完毕,消防水带可以折叠,能大大加长作业的距离,不锈钢编织管作为后段水管,其外层为不锈钢丝编织网,内层为耐高温橡胶管,具有抗高温、半硬质、强度高的特性,不锈钢编织管缠绕在水管卷筒上不会彼此压扁,在火场释放后一般坠物压不扁,能够时刻保证顺利出水。
本发明形成了:干粉灭火器紧急灭火—水冷却技术—自喷淋技术—复合夹层防护四位一体的复合型抗高温防护系统,水冷却技术与自喷淋技术中的水流方向为:消防软水带→不锈钢编织管→万向接头→摄像头防护罩→金属冷却细管→电机冷却水罩→履带水喷头、自喷淋喷头,形成了一套完整的水冷却防护系统。
本发明的优点及积极效果是:
1、本发明与传统火灾救人机器人相比,本发明实现了外界连续供水,解决了拖拽水管导致水管弯折不通水的问题,实现了多种抗高温防护方法的复合,解决了对被救者防护性能差的问题,解决了机器人过楼梯突变拐点时造成的冲击;此外,本发明还实现了把被救者从箱体快速移出、电池的快速更换、箱内被救者在上下楼梯时保持水平、氧气自供给、摄像头的防护等功能,提高了救人效率,节省了救援时间,为火灾救人提供新的高效办法,让室内火灾直接救人成为可能,大大地减少了由于火灾带来的人员伤亡,对消防救援领域具有极其重要的意义。
2、本发明应用十分广泛,高层建筑、地铁、隧道、化工厂、仓库、舰船、商场等火灾发生地,主要以室内火灾救人为主,可以直接搭载小型消防侦察机器人、小型消防清障机器人、小型灭火机器人等进入高温火场,还可以搭载防护服、氧气罐等急救设备进入火场给被困者。
3、本发明除了用于火灾救援灭火之外,本发明还能用于其它救援领域,例如:用于地震、海啸、洪灾后的被救人员运载和急救物资运送等灾后救援工作,能用于炮弹、子弹等军事装备的运输,还能用于易燃易爆等危险物品的搬运和转移等。
4、本发明采用耐高温金属履带底盘,能使其具有强大的越障能力和耐高温能力;底盘下可自动收放的支撑架,避免了机器人经过楼梯斜面与平面相交突变的拐点时造成的冲击;底盘的底箱内的氧气供给单元,能为被救者提供清洁的氧气。采用的减震器和液压推杆结合作为智能悬架,做到了四点减震和箱体的水平调节;悬架跟箱体采用四点铰接方式,实现了箱体的快速拆卸;底盘中的底箱盖采用翻盖式,方便对控制单元调试维修;底箱盖为可拆卸设计,实现了电池的快速更换。
5、本发明采用箱体运载被救者,实现了与外界隔绝保障了被救者的安全;采用开关门机构,可实现自动开关门;箱体内采用可滑出式托板,能把被救者从箱体快速移出;箱体以铝合金为主体材料,保证结构强度的情况下减轻了车体质量;箱体采用双壳体复合夹层设计,能大大增加了结构强度和隔热性能;以不锈钢薄板作为箱体外壳,不怕防火不怕烧穿又不怕生锈;箱体内角落设置小型干粉灭火器,实现了突发爆燃情况下的紧急灭火防护;箱体顶部采用三角状的角顶板,能防止坠落火源的过度灼烧。
6、本发明采用自动水管卷筒,可实现自动收放水管进而实现外界连续供水;采用软水带和半硬质金属编制管结合,能大大加长作业的距离又能时刻保证水能够顺利流出;采用干粉紧急灭火、自喷淋技术和复合夹层结合,实现了紧急灭火和对车体的高温防护;采用金属罩、钢化玻璃水夹层对摄像头防护,保护了摄像头和保证了成像清晰。
附图说明
通过参考以下结合附图的说明,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
图1为本发明中被救者从机器人的箱体中快速移出的示意图。
图2为本发明中被救者躺在机器人箱体内的示意图。
图3为本发明中机器人火灾救人过程的流程图。
图4为本发明中机器人整体结构示意图。
图5为本发明中机器人整体结构拆解示意图。
图6为本发明中机器人打开箱门后的示意图。
图7为本发明中机器人整体结构骨架示意图。
图8为本发明中机器人履带底盘整体示意图。
图9为本发明中机器人经过楼梯斜面与平面相交突变的拐点时示意图。
图10为本发明中第一复合夹层结构示意图。
图11为本发明中机器人履带底盘的底箱布置示意图。
图12为本发明中第二复合夹层结构示意图。
图13为本发明中机器人底箱的翻盖板打开后的示意图。
图14为本发明中机器人履带底盘中悬架和行走电机布置示意图。
图15为本发明中机器人支撑架结构和其工作的示意图。
图16为本发明中机器人箱体上的开关门机构示意图。
图17为本发明中机器人箱体上的门锁止机构示意图。
图18为本发明中机器人悬架的后悬架结构和其工作示意图。
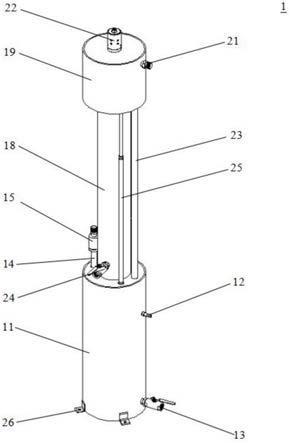
图19为本发明中机器人水管卷筒结构和金属冷却细管布设示意图。
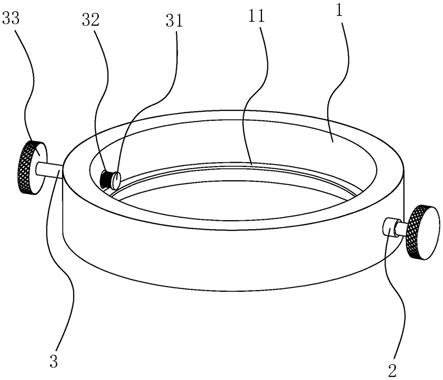
图20为本发明中机器人水管卷筒主体构架示意图。
图21为本发明中机器人水管卷筒中水管紧排机构和拉管机构示意图。
附图注释:履带底盘1、箱体2、水管卷筒3、悬架4、底盘骨架11、金属履带12、底箱13、防护盖层14、支撑架15、第一复合夹层16、履带水喷头17、行走电机131、电源132、电动液压泵133、卷扬机134、供氧单元135、控制箱136、电机冷却水罩137、底箱盖138、翻盖板139、金属轮151、钢索152、定滑轮153、限位拉杆154、箱体本体21、履带裙板22、箱门23、托板24、干粉灭火器25、角顶板26、第二复合夹层27、金属冷却细管271、电推杆231、摇杆232、连杆233、锁头234、锁孔235、干粉喷头38、摄像头防护罩28、防护罩底座281、金属笼282、钢化玻璃夹层283、组合摄像头284、led照明灯285、前悬架41、后悬架42、板簧减震器421、电动液压推杆422、卷筒骨架31、万向接头32、卷筒转动机构33、卷筒保持架34、水管紧排机构35、拉管机构36、自喷淋喷头37、止推轴承331、滚珠轴承332、卷筒齿轮333、卷筒电机334、不锈钢薄板335、丝杠支架351、螺母352、通管环353、丝杠电机354、丝杠355、压轮361、水管362、拉管齿轮363、拉管架364、拉管电机365。
具体实施方式
在下面的描述中,出于说明的目的,为了提供对一个或多个实施例的全面理解,阐述了许多具体细节。然而,很明显,也可以在没有这些具体细节的情况下实现这些实施例。在其它例子中,为了便于描述一个或多个实施例,公知的结构和设备以方框图的形式示出。
参阅图1-21,本发明提供的基于箱体的室内火灾救人消防机器人,包括:用于行走驱动的金属履带底盘1、用于运载人的具有复合夹层防护的箱体2、用于箱体水平衡调节的智能悬架4、位于箱体顶部用于收放水管的自动水管卷筒3。其基本救人过程为:救人机器人进入火场,并且进入时水管卷筒3自动释放水管,进入火场后语音呼叫被困者,打开箱门23,被困者钻入箱体2,箱门23关闭,救人机器人将人运出火场,通过拉出箱内的托板24将人快速转移。
参阅图7-11,本实施例中的金属履带底盘1主体由高熔点的耐高温金属材料制成,包括金属履带底盘骨架11、金属履带12、底箱13、防护盖层14、支撑架15,其中底箱13的底部、两条履带的两侧和顶部均由第一复合夹层16包围,所述第一复合夹层16按从外到内其结构组成依次为:高反光金属箔片a—不锈钢薄板b—含锆陶瓷纤维隔热棉c—铝箔d—含锆陶瓷纤维隔热棉c—铝合金板e(具体参阅图10),每条金属履带底盘1的前端后端分别设置有履带水喷头17,第一复合夹层16和履带水喷头17实现了履带的高温防护;两条履带中间为底箱13,底箱13由底箱壁和底箱顶围成封闭空间,底箱壁和底箱顶由第一复合夹层16构成。
参阅图11,本实施例中的底箱13内设置有驱动履带底盘行进的行走电机131、用于给整机供电的电源132、给液压推杆提供动力的电动液压泵133、用于收放支撑架的卷扬机134、用于给被救者供氧的供氧单元135、用于控制整机运行的控制箱136。
参阅图13-14,本实施例中的行走电机131周围设置有电机冷却水罩137,该电机冷却水罩137由内外壳构成,中间为冷却水层,利用流动水带走热量实现行走电机131的散热;所述电源132的总开关由远程遥控的电源控制接触器控制,以防止局部线路发生故障时能及时切断总电源132,避免整机烧毁;所述卷扬机134具有收放钢索152的功能,通过卷扬机134收放钢索152来控制支撑架15的自动收放;所述供氧单元135采用氧气罐作为氧气源,通过外加隔热材料的金属导气管引到箱体2内的氧气面罩,其中导气管中间设置电磁阀控制氧气的开闭,箱内上设置有单向阀,使得被救者能从箱体2内排除废气而外界气体不能进入,利用该供氧单元135实现了对被救者的氧气供给;所述底箱盖138为可拆卸设计,一次救援工作结束后可拆开底箱盖138以实现电池的快速更换,再次进行下一次任务;所述底箱盖138前半部段为可翻转的翻盖板139,翻盖板139前端通过门鼻子与底箱13连接,需要时方便打开对控制箱136内的控制元件进行调试维修。
参阅图8,本实施例中的防护盖层14位于履带底盘最顶部,且通过钢丝与底盘上部固联形成可拆卸结构,防护盖层14由含锆陶瓷纤维隔热棉和高反光金属箔片构成,高反光金属箔片将含锆陶瓷纤维隔热棉包裹,防火隔热,利用底箱13两侧的履带、防护盖层14和第一复合夹层16实现了对底箱13进行防护。
参阅图15,本实施例中的支撑架15位于履带底盘1前部的下方,支撑架15顶部与底盘骨架11铰接,可绕着铰接座在前后方向上转动,支撑架15底部设置有金属轮151,支撑架与一根钢索152的两端固连,该钢索152经过定滑轮153由卷扬机134牵拉,支撑架15、钢索152、卷扬机134形成闭环,从而牵引支撑架15转动实现自动收放,支撑架15在机器人经过楼梯斜面与平面相交突变的拐点时放下,由铰接的限位拉杆154对放下的最大角度进行限位,支撑架15给予履带底盘1支撑,使该过度过程平稳,避免了瞬间冲击。
参阅图6和7,本实施例中的箱体2包括箱体本体21、履带裙板22、姿势提示图、箱门23、托板24、干粉灭火器25、角顶板26,箱体2主要用于运载被救者,实现了箱体2内被救者与外界的隔绝,保障了被救者的人身安全。
参阅图6和7,本实施例中的箱体本体21和箱门23以铝合金为主体材料,以铝合金桁架为箱体骨架,采用第二复合夹层27作为防护,形成封闭空间。所述第二复合夹层27按从外到内其结构组成依次为:高反光金属箔片a'—不锈钢薄板b'—含锆陶瓷纤维隔热棉c'—铝箔d'—金属冷却细管271—铝箔d'—含锆陶瓷纤维隔热棉c'—铝合金板e'—橡塑保温软垫f'(参阅图12),能大大增加了结构强度和隔热性能。其中,高反光金属箔片由具有高熔点、高反光率的金属材料制成,作为最外层能直接反射掉大量热辐射;不锈钢薄板作为外层壳体,其强度较高、熔点高、表面光洁度高,具有优异的防火性能,防止了生锈,也避免了由于外界障碍物的剐蹭导致外壳结构破坏,良好的导热性还使得不锈钢薄板层的温度趋近,一定程度上避免了局部高温烧穿;含锆陶瓷纤维隔热棉由含锆陶瓷纤维制成,具有抗1400℃超高温的优良隔热性能,有效阻挡了热量的传递;铝箔位于金属冷却细管271的两侧,能阻挡夹层内部的微空气热对流现象,较高的反光率也能使之能反射部分外来热辐射,减缓了热传递,铝箔还具有良好的导热性使得铝箔和金属冷却细管之间的热量交换更加快速,加快了冷却效果;铝合金板作为内层壳体,起到保持主体结构的作用,质量轻强度高;橡塑保温软垫位于箱体最内层,具有良好的隔热性能、柔软、亲肤,具有良好的减震性能。采用该铝合金骨架和第二复合夹层27设计,在保证结构强度的情况下,不但减轻了车体质量,而且具有良好的隔热和冷却效果。
参阅图6和7,本实施例中的履带裙板22位于箱体2下部两侧,与箱体2侧壁固定,由不锈钢薄板构成,机器人在平面上时履带裙板22能盖住外侧,当机器人上下楼梯时履带裙板22能盖住箱体2与底盘间的大部分间隙,有效防止热浪冲击底箱13。
所述姿势提示图(未显示)粘贴于箱体2内壁,用来提示钻进箱体2内的被困者应该采取蜷曲侧躺的姿势,蜷曲侧躺在箱体2相对稳定,且有利于降低整机重心。
参阅图16和17,本实施例中的箱门23位于机器人前部,箱门23通过开关门机构和门锁止机构实现开合和锁止,所述箱门23和箱体主体21后部为尖三角形状,有利于撞开门和阻挡在前方的障碍物,箱门23通过合页与箱体本体21铰接;所述开关门机构以电推杆231作为动力,电推杆231做伸缩运动,驱动曲柄摇杆机构中的摇杆232做摆转运动,通过连杆233牵拉作为曲柄的箱门23做旋转运动,当检测到人要钻入箱体2时自动打开箱门23,钻入箱体2后自动关闭箱门23;门锁止机构包括锁头234和锁孔235,锁头234设置于箱体2内侧壁的前端位置,锁头234上的楔形锁杆可自动伸缩,开门时锁杆缩回与锁孔235脱离,关门后楔形的锁杆伸长与锁孔235实现锁合,并且楔形锁杆伸长时会压迫锁孔235向里运动实现箱门23的扣紧。
参阅图6,本实施例中的可滑出式托板24设置于箱体2内部底面,主体为铝合金材料,托板24上表面粘贴有橡塑保温软垫,被救者蜷曲侧躺在上面,被救者在被本机器人救出火场后,通过该托板24能把被救者从箱体2快速移出,实现了人的快速转移。
参阅图7,本实施例中的小型干粉灭火器25设置于箱体2内角落位置,该干粉面粉灭火器25通过金属波纹管与干粉电磁阀相连,干粉电磁阀作为开管控制干粉是否喷射,且干粉电磁阀通过金属波纹管与机器人顶部的干粉喷头38相连,干粉喷头38具有两自由度,可在水平面上和竖直平面上旋转,在火场中突发爆燃情况,威胁到救人机器人时,控制打开该干粉灭火器25进行紧急灭火保护。
参阅图6、7、9,本实施例中的三角状的角顶板26固定于箱体2顶部,内侧以铝合金桁架为支撑骨架,外侧为不锈钢薄板,整体呈三角尖顶状,当有坠落火源时,能够顺势下滑,避免火源对箱体2的定点过度灼烧。角顶板26顶部位置设置有摄像头防护罩28,摄像头防护罩28通过防护罩底座281跟箱体2顶部固定,摄像头防护罩28包括金属笼282、钢化玻璃夹层283,两层钢化玻璃中间夹层通水构成防护水层,水从夹层底部流入从顶部流出以实现充满水,摄像头防护罩28内设置由可见光摄像头和红外摄像头构成的组合摄像头284,摄像头防护罩28内的组合摄像头284底部设置有led照明灯285提供照明。
参阅图5、14、18,本实施例中的悬架4包括一对前悬架41和一对后悬架42,所述前悬架41由一组对称的弹簧减震器构成,其底端与底盘骨架焊接固定,上端与箱体底部铰接;所述后悬架42由两组板簧减震器421和两组电动液压推杆422构成,板簧减震器421与箱体2连接固定,板簧减震器421下部通过铰接支座跟电动液压推杆422上部铰接,电动液压推杆422底部通过铰支座与底盘骨架11铰接,悬架4跟箱体2采用四点铰接方式,实现了箱体2的快速拆卸,以便快速更换履带底盘1中的电池或对履带底盘1中的控制元件进行调试,两组弹簧减震器和两组板簧减震器421做到了四点减震,保证了箱体2运行时的平稳性;所述电动液压推杆422中,由电机驱动液压泵,液压泵配合陀螺仪倾角传感器,能使其所连接的电磁换向阀实现推杆伸、缩控制,使其所连接的电动节流阀实现伸缩速度大小的调节,推杆的伸缩驱使箱体绕弹簧减震器上铰接点旋转,配合陀螺仪对倾角的测量和单片机反馈控制,从而实现箱体2内的人在机器人上下楼梯过程中时刻保持水平。
参阅图19、20、21,本实施例中的自动水管卷筒3位于箱体2顶部,自动水管卷筒3包括:卷筒骨架31、万向接头32、卷筒转动机构33、卷筒保持架34、水管紧排机构35、拉管机构36和自喷淋喷头37,自动水管卷筒3用于缠绕水管362,自动实现水管362的“边走边放,边撤边收”功能,从而实现从外界连续供水。所述卷筒骨架31由水管362缠绕,水管362一端从卷筒骨架31的卷筒空心轴中穿过连接于顶部的所述万向接头32,所述万向接头32一端与卷筒空心轴固定,另一端与输出管相连,其两端部分可以相对转动。
所述卷筒转动机构包括止推轴承331、滚珠轴承332、卷筒齿轮333、卷筒电机334,止推轴承331位于卷筒骨架31底部,用于支持卷筒,滚珠轴承332位于卷筒骨架31顶部,用于对卷筒限位固定,一对卷筒齿轮333其中之一与卷筒空心轴固联,另外一个与卷筒电机334通过联轴器固联,卷筒电机334上有第一复合夹层16防护,卷筒电机334通过啮合的卷筒齿轮333带动卷筒骨架31转动,在机器人后退时给予水管362向内回收的拉力。
所述卷筒保持架34通过螺栓与箱体2固定,并通过轴承与卷筒骨架31保持相对位置关系,卷筒骨架31能够相对卷筒保持架34转动,保持架上固定有不锈钢薄板335包围和保护着卷筒。
所述水管紧排机构35为竖立的丝杠螺母机构,位于卷筒骨架31的边缘、箱体2顶部后方,丝杠支架351与保持架固定,螺母352上固连着通管环353,水管从通管环353中通过,位于卷筒顶部的丝杠电机354转动,丝杠电机354上有第一复合夹层16防护,通过丝杠355驱动螺母352上的通管环353来回做上下移动,进而带动水管362做上下移动,配合机器人行进速度,做到水管362在收回时能够一层层紧密排列,节省了空间,在释放时能够一层层按顺序释放。
所述拉管机构36位于水管紧排机构35之后,在机器人前进时给予水管362向外释放的拉力,拉管机构36包括一对中间细两端粗的压轮361,水管362从压轮361中间穿过受其挤压,压轮361表面粗糙,靠摩擦力牵引水管362,其一端与一对啮合的拉管齿轮363固联,压轮361和拉管齿轮363均架设在拉管架364上,拉管电机365上有第一复合夹层16防护,其与其中一齿轮固联,通过拉管齿轮363驱动一对压轮361作相对转动,从而牵拉水管362向外运动。
所述水管362包括消防软水带和半硬质的不锈钢编织管,消防软水带作为前段水管,在未进入火场前就释放完毕,消防水带可以折叠,能大大加长作业的距离,不锈钢编织管作为后段水管,其外层为不锈钢丝编织网,内层为耐高温橡胶管,具有抗高温、半硬质、强度高的特性,不锈钢编织管缠绕在水管卷筒3上不会彼此压扁,在火场释放后一般坠物压不扁,能够时刻保证顺利出水,解决了普通消防机器人拖拽水带导致打折无法通水的问题。
所述自喷淋喷头37位于水管卷筒3顶部,并与卷筒保持架34固定,其为坚硬的金属材质,顶部尖锐,从自喷淋喷头37喷出的水能均匀的喷洒到机器人顶部,沿着侧壁自上向下流动对机器人进行再次冷却。
本实施例中的机器人形成了:干粉灭火器紧急灭火—水冷却技术—自喷淋技术—复合夹层防护四位一体的复合型抗高温防护系统,水冷却技术与自喷淋技术中的水流方向为:消防软水带→不锈钢编织管→万向接头→摄像头防护罩→金属冷却细管→电机冷却水罩→履带水喷头、自喷淋喷头,形成了一套完整的水冷却防护系统。
本发明优先拯救还有行为能力的被困者,一般采用多台救人机器人一起进入火场救援,还有行为能力的被困者救出后再拯救昏迷者,其救援方法是:两台救人机器人一起进入火场,其中一台救人机器人搭载一名消防员一同进入,当发现昏迷者时消防员从救人机器人中下来,帮助昏迷者,将其装入另一台救人机器人后,再一同撤出火场。
本发明应用十分广泛,能够应用于高楼、化工厂、车库、密闭空间、地铁、隧道、仓库、车站、舰艇、轮船、商场、危险品转移等几乎一切环境,主要用于室内火灾直接救人,此外,可直接搭载巨大的干粉灭火器、泡沫灭火剂进入火场进行大面积灭火,还可直接用于搭载消防设备、子消防机器人、消防急救物资进入火场进入室内火场,进行其它消防救援工作。
需要说明的是,本技术领域的人员根据本发明所提供的文字描述、附图以及权利要求书能够很容易在不脱离权利要求书所限定的本发明的思想和范围条件下,可以做出多种变化和改动。凡是依据本发明的技术思想和实质对上述实施例进行的任何修改、等同变化,均属于本发明的权利要求所限定的保护范围之内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。