1.本公开属于清洁设备技术领域,具体提供了一种清洁机器人。
背景技术:
2.随着技术的不断进步和人们生活水平的不断提高,清洁机器人正在走进越来越多家庭。清洁机器人主要包括扫地机器人和拖地机器人,能够自动对地面进行清洁作业。
3.为了构建家庭环境的地图,以及为了引导清洁机器人对家庭环境进行清洁,现有的清洁机器人都配置有激光导航模块,以使清洁机器人通过激光导航模块来对家庭环境进行扫描并构建环境地图,以及根据构建得来的环境地图和/或实施获取的数据信息来引导清洁机器人对家庭环境进行清洁。
4.目前市场上的清洁机器人都是将激光导航模块设置在清洁机器人的顶部,具体是使激光导航模块凸出于清洁机器人的顶部。但是在清洁机器人使用的过程中,经常会出现如下情形:
5.(1)在对柜子、床、桌子下方的空间进行清洁时,清洁机器人顶部的激光导航模块经常会与柜子、床、桌子发生碰撞,发生损坏。
6.(2)清洁机器人顶部的激光导航模块容易被坠落的杯子、手机、碗等物品砸中,被损坏。
7.如公告号为cn210931169u的中国专利文献中,公开了一种机器人,其将避障传感单元设置在了机器人的前侧。而该机器人无法通过该避障传感单元来引导机器人进行沿边作业。
8.需要说明的是,本公开之所以引入公告号为cn210931169u的中国专利文献,仅仅是为了便于本领域技术人员理解现有技术,并非有意诽谤、诋毁该专利记载的技术方案。
技术实现要素:
9.本公开旨在提供一种新的清洁机器人,以使该清洁机器人能够通过同一个激光导航模块进行导航和沿边作业。本公开的清洁机器人,包括主机和固设于前述主机的前侧部的激光导航模块,前述主机具有前后延伸并且垂直于其左右方向的中轴面,前述激光导航模块包括激光发射器和激光接收器,前述激光发射器和前述激光接收器位于前述中轴面的同一侧,并且前述激光发射器设置在前述激光接收器的正上方;前述清洁机器人沿边作业时的沿边对象与前述激光导航模块位于前述中轴面的同一侧,以使前述激光导航模块引导前述清洁机器人进行沿边作业。
10.可选地,前述激光发射器与前述中轴面之间的距离小于前述激光接收器与前述中轴面之间的距离。
11.可选地,前述激光发射器的发射口的端面面积小于前述激光接收器的接收口的端面面积。
12.可选地,前述激光发射器的中心与前述激光接收器的中心之间的距离范围为大于
等于25mm,小于等于45mm。
13.可选地,前述激光导航模块与前述主机中心的连线与前述中轴面之间的夹角范围为大于等于5
°
,小于等于20
°
。
14.可选地,前述清洁机器人还包括包围前述激光导航模块的碰撞板,前述碰撞板上设置有与前述激光导航模块对准的透射窗口,前述碰撞板上在前述透射窗口处安装有遮光片,前述遮光片允许激光穿过。
15.可选地,前述清洁机器人还包括设置在前述激光发射器与前述激光接收器之间的分隔构件,前述分隔构件的一端与前述主机抵接,前述分隔构件的另一端与前述碰撞板抵接。
16.可选地,前述分隔构件是由弹性材料制成的罩子,前述罩子包括小口端和大口端,前述罩子通过前述小口端与前述主机抵接,前述罩子通过前述大口端与前述碰撞板抵接;前述罩子套设在前述激光接收器的外侧。
17.可选地,前述透射窗口包括与前述激光发射器对准的第一窗口和与前述激光接收器对准的第二窗口。
18.可选地,前述碰撞板上设置有弱化区域,前述弱化区域与前述透射窗口相对于前述中轴面对称。
19.本领域技术人员能够理解的是,本公开前述的清洁机器人至少具有如下有益效果:
20.1、通过将激光导航模块设置在主机的前侧部,并且使激光导航模块的激光发射器和激光接收器均位于主机中轴面的同一侧,使得清洁机器人能够通过直行、拐弯、旋转等动作使激光导航模块扫描家居环境,从而完成家居环境地图的构建。同时,清洁机器人在沿边作业时,通过使激光导航模块与沿边对象位于中轴面的同一侧,使得清洁机器人还能够通过设置在其侧前方的激光导航模块引导其进行沿边作业。因此,本公开的清洁机器人在保证激光导航模块能够实现对家具环境进行探测功能的前提下,还能够通过激光导航模块进行沿边作业,进而能够替代现有清洁机器人上的沿墙传感器,降低了生产成本。
21.进一步,本领域技术人员能够理解的是,由于激光发射器设置在激光接收器的正上方,所以为了确保激光接收器能够接收到激光发射器发出的激光,激光发射器发出的激光不与地面平行,并且与地面之间具有较小的夹角,以使投射到墙面上的激光能够反射到激光接收器。本领域技术人员还能够理解的是,由于大部分的墙面通常都比较粗糙,并不是光滑的镜面,所以激光在投射到墙面之后通常会发生漫反射,致使一部分激光会被墙面反射到地面上,进而再反射到激光接收器。所以,激光接收器接收到的激光包括两部分,其中一部分为从墙面上直接反射回来的激光,另一部分为从地面上反射回来的激光,因此,本公开的激光导航模块相对于将激光发射器和激光接收器设置成左右分布的激光导航模块而言,所接收到的激光信号更强,检测数据更加准确。
22.2、通过使激光发射器的发射口的端面面积小于激光接收器的接收口的端面面积,使得激光发射器发射的激光信号较弱时也能够被激光接收器接收到,进而使得激光发射器以较小的功率的运行即可实现激光导航模块的探测功能。
23.3、通过使激光导航模块与主机中心的连线与中轴面之间的夹角范围为 [5
°
,20
°
],使得激光导航模块的探测方向与现有清洁机器人上沿边传感器的探测方向相同或接
近相同,从而能够准确地引导清洁机器人进行沿边作业。
[0024]
4、通过使碰撞板包围在激光导航模块的外侧,使得碰撞板能够对激光导航模块进行保护,避免了激光导航模块因被外物碰撞而损坏。
[0025]
5、通过在激光发射器与激光接收器之间设置分隔构件,并使分隔构件的一端与主机抵接,使分隔构件的另一端与碰撞板抵接,避免了激光发射器发出的激光还未穿过碰撞板就被激光接收器接收到,影响激光导航模块的探测效果。
[0026]
6、通过将分隔构件设置成由弹性材料制成的罩子,使得分隔构件能够随着碰撞板的移动而发生伸缩,以适应碰撞板的位置变换。
附图说明
[0027]
下面参照附图来描述本公开的优选实施例,附图中:
[0028]
图1是本公开优选实施方案中清洁机器人的结构分解图;
[0029]
图2是本公开优选实施方案中清洁机器人的轴测视图(无碰撞板);
[0030]
图3是本公开优选实施方案中清洁机器人的俯视图(无碰撞板);
[0031]
图4是本公开优选实施方案中清洁机器人的主机的轴测视图;
[0032]
图5是图4中d部的放大图;
[0033]
图6是本公开优选实施方案中激光导航模块的轴测视图;
[0034]
图7是本公开优选实施方案中激光导航模块的工作原理示意图;
[0035]
图8是本公开优选实施方案中碰撞板的轴测视图。
[0036]
附图标记列表:
[0037]
1、主机;11、中轴面;
[0038]
2、激光导航模块;21、激光发射器;22、激光接收器;
[0039]
3、碰撞板;31、透射窗口;311、第一窗口;312、第二窗口;32、遮光片;33、弱化区域;
[0040]
4、分隔构件;
[0041]
5、顶壳;
[0042]
6、集尘盒;
[0043]
7、拖地箱。
具体实施方式
[0044]
本领域技术人员应当理解的是,下文所描述的实施例仅仅是本公开的优选实施例,并不表示本公开仅能通过该优选实施例实现,该优选实施例仅仅是用于解释本公开的技术原理,并非用于限制本公开的保护范围。基于本公开提供的优选实施例,本领域普通技术人员在没有付出创造性劳动的情况下所获得的其它所有实施例,仍应落入到本公开的保护范围之内。
[0045]
需要说明的是,在本公开的描述中,术语“中心”、“上”、“下”、“顶部”“底部”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0046]
此外,还需要说明的是,在本公开的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本公开中的具体含义。
[0047]
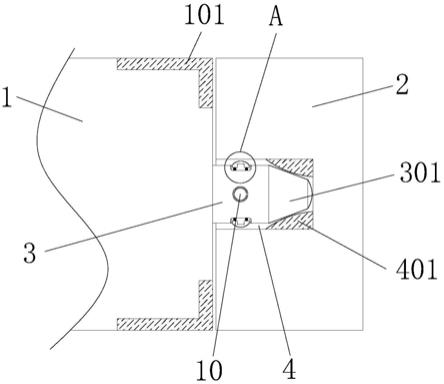
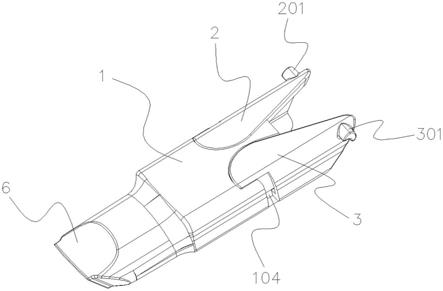
如图1至图6所示,清洁机器人包括主机1和固设于主机1的前侧部的激光导航模块2。其中,主机1具有前后延伸并且垂直于其左右方向的中轴面11 (如图3中所示的点划线和图4中点划线所示的平面),激光导航模块2包括激光发射器21和激光接收器22,激光发射器21和激光接收器22位于中轴面的同一侧,并且激光发射器2设置在激光接收器22的正上方。
[0048]
本领域技术人员能够理解的是,在本公开的优选实施例中,通过将激光导航模块2设置在主机1的前侧部,并且使激光导航模块2的激光发射器21和激光接收器22均位于主机1中轴面11的同一侧,使得清洁机器人能够通过直行、拐弯、旋转等动作使激光导航模块2扫描家居环境,从而完成家居环境地图的构建。因此,本实施例的清洁机器人在保证激光导航模块2能够实现对家具环境进行探测功能的前提下,还避免了将激光导航模块2设置在清洁机器人的顶部的情形,相对于现有的清洁机器人有效地避免了激光导航模块2被损坏。
[0049]
进一步,虽然图中并未示出,但是清洁机器人沿边作业时的沿边对象与激光导航模2块位于中轴面的同一侧,以使激光导航模块2引导清洁机器人进行沿边作业。因此,本公开优选实施例中的清洁机器人还能够通过激光导航模块 2进行沿边作业,进而能够替代现有清洁机器人上的沿墙传感器,降低了生产成本。
[0050]
如图7所示,由于激光发射器21设置在激光接收器22的正上方,所以为了确保激光接收器22能够接收到激光发射器21发出的激光,激光发射器21 发出的激光不与地面平行,并且与地面之间具有较小的夹角,以使投射到墙面上的激光能够反射到激光接收器22。本领域技术人员还能够理解的是,由于大部分的墙面通常都比较粗糙,并不是光滑的镜面,所以激光在投射到墙面之后通常会发生漫反射,致使一部分激光会被墙面反射到地面上,进而再反射到激光接收器22。所以,激光接收器22接收到的激光包括两部分,其中一部分为从墙面上直接反射回来的激光(如图7中实线所示的激光),另一部分为从地面上反射回来的激光(如图7中虚线所示的激光),因此,本公开的激光导航模块2相对于将激光发射器21和激光接收器22设置成左右分布的激光导航模块而言,所接收到的激光信号更强,检测数据更加准确。
[0051]
进一步,虽然图中并未示出,但是激光发射器21与中轴面11之间的距离小于激光接收器22与中轴面11之间的距离,并且激光发射器21的发射口的端面面积小于激光接收器22的接收口的端面面积。以便使激光发射器21发射较弱的激光信号时也能够被激光接收器22接收到,进而使得激光发射器21以较小的功率的运行即可实现激光导航模块2的探测功能。
[0052]
进一步,虽然图中并未示出,但是激光发射器21的中心与激光接收器22 的中心之间的距离范围为[25mm,45mm],例如25mm、30mm、40mm、45mm 等。需要说明的是,该距离范围在保证激光导航模块2结构尽量紧凑的前提下,还能够有效地避免激光发射器21发出的激光尚未透射到障碍物上就被激光接收器22接收到。
[0053]
再进一步,激光导航模块2与主机1中心的连线与中轴面11之间的夹角范围为[5
°
,
20
°
],例如5
°
、8
°
、12
°
、20
°
等。以便使激光导航模块2能够替代现有清洁机器人上的红外沿墙传感器,来引导清洁机器人进行沿边作业。本领域技术人员应当理解的是,在激光导航模块2引导清洁机器人进行沿边作业的过程中,沿边对象与激光导航模块2均位于中轴面11相同的一侧。
[0054]
如图1至图3所示,清洁机器人还包括碰撞板3、分隔构件4、顶壳5、集尘盒6和拖地箱7。其中,碰撞板3包围在激光导航模块2的外侧,并且包裹主机1的前部。进一步,虽然图中并未示出,但是碰撞板3与主机1之间还是设置有弹性构件,并且碰撞板3能够相对于主机1移动,以便在清洁机器人前进的过程中能够通过碰撞板3与碰撞物发生碰撞,并通过弹性构件吸收碰撞产生的冲击,以对主机1和激光导航模块2进行保护。分隔构件4设置在激光发射器21与激光接收器22之间,并且分隔构件4的一端与主机1或激光导航模块2抵接,分隔构件4的另一端与碰撞板3抵接,以避免激光发射器21发出的激光尚未透射到障碍物上就被激光接收器22接收到。顶壳5设置在主机1 的顶部,集尘盒6和拖地箱7可拆卸地安装到主机1上。
[0055]
其中,主机1上设置有清洁辊、吸尘风机和输送泵。清洁机器人工作时,能够通过清洁辊拾取地面上的异物,然后被吸尘风机吸引至集尘盒6中。拖地箱7的底部设置有拖布,在拖地箱7安装到主机1上的状态下,主机1上的输送泵能够将拖地箱7内的清洁液输送到拖布上,浸湿拖布,进而使拖布对地面进行托擦作业。
[0056]
如图8所示,碰撞板3上设置有透射窗口31,在清洁机器人装配好的状态下,该透射窗口31与激光导航模块2对准。具体地,透射窗口31包括与激光发射器21对准的第一窗口311和与激光接收器22对准的第二窗口312。
[0057]
继续参阅图8,碰撞板3上在透射窗口31处安装有遮光片32,该遮光片 32完全覆盖第一窗口311和第二窗口312。该遮光片32允许激光穿过,以使激光发射器21发出的激光能够投射到障碍物上,使从障碍物上反射回来的激光能够被激光接收器22接收到。同时该遮光片32还减少或避免可见光穿过,以避免影响激光接收器22的接收效果。
[0058]
继续参阅图8,碰撞板3上还设置有弱化区域33。在清洁机器人装配好的状态下,该弱化区域33与透射窗口31相对于中轴面11大致对称,并且弱化区域33的外形与碰撞板3上遮光片32处的外形相同,以使碰撞板3具有对称的美观性。需要说明的是,该弱化区域33旨在弱化碰撞板3上该处的强度,以使该处具有与透射窗口31处相同的强度,从而使碰撞板3左右两侧的强度大致相同,以便避免碰撞板3在长期碰撞的过程中因左右强度不对称而出现变形,甚至出现裂痕。
[0059]
返回去继续参阅图1至图5,分隔构件4具体为由弹性材料制成,并且套设在激光接收器22外侧的罩子,该罩子包括小口端(图中未标记)和大口(图中未标记)端,该罩子通过小口端与激光导航模块2抵接,该罩子通过大口端与碰撞板3抵接(具体是穿过第二窗口312与遮光片32抵接)。
[0060]
本领域技术人员能够理解的是,之所以使罩子的大口端与遮光片32抵接,是为了使激光接收器22能够接收的激光的范围更大。之所以采用弹性材料制作罩子,是为了使分隔构件4在保证其与遮光片32紧密接触的前提下,能够随着碰撞板3的移动而发生伸缩,以适应碰撞板3的位置变换。
[0061]
此外,本领域技术人员也可以根据需要,使分隔构件4套设在激光发射器 21的外侧。或者,将分隔构件4设置成其他任意可行的形状,例如板状。
[0062]
作为示例一,该将该分隔构件4设置成板状构件,并且使该板状构件与激光导航模块2或主机1固定连接,碰撞板3上设置有容纳槽。在碰撞板3相对于主机1移动的过程中,板状构件的部分结构始终位于该容纳槽内。
[0063]
作为示例二,该将该分隔构件4设置成板状构件,并且使该板状构件与碰撞板3固定连接,主机1和激光导航模块2上设置有均容纳槽。在碰撞板3相对于主机1移动的过程中,板状构件的部分结构始终位于该容纳槽内。
[0064]
作为示例三,该将该分隔构件4设置成两个板状构件,使其中的一个板状构件与激光导航模块2或主机1固定连接,使另一个板状构件与碰撞板3固定连接,在碰撞板3相对于主机1移动的过程中,两个板状结构的部分结构始终彼此交错覆盖。
[0065]
基于前文的描述,本领域技术人员能够理解的是,在本公开的优选实施例中,通过将激光导航模块2设置在主机1的前侧部,并且被碰撞板3所围绕,既避免了激光导航模块2被坠落物或障碍物碰撞而损坏的情形,而且还能够替代现有清洁机器人的红外沿墙传感器,引导清洁机器人进行沿墙作业,降低了清洁机器人的生产成本。进一步,通过在激光发射器21与激光接收器22之间设置分隔构件4,并使分隔构件4的一端与主机1抵接,使分隔构件4的另一端与碰撞板3抵接,避免了激光发射器21发出的激光还未穿过碰撞板3就被激光接收器22接收到,影响激光导航模块2的探测效果。
[0066]
至此,已经结合前文的多个实施例描述了本公开的技术方案,但是,本领域技术人员容易理解的是,本公开的保护范围并不仅限于这些具体实施例。在不偏离本公开技术原理的前提下,本领域技术人员可以对上述各个实施例中的技术方案进行拆分和组合,也可以对相关技术特征作出等同的更改或替换,凡在本公开的技术构思和/或技术原理之内所做的任何更改、等同替换、改进等都将落入本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。