1.本发明涉及一种粉尘收集系统。
背景技术:
2.很多产品在生产过程中会产生大量的粉尘,如pcb板生产车间中,锣板以及pcb板钻孔的过程中,会产生大量的粉尘,为了保证车间工作人员的工作安全,通常是在产生粉尘的车间中安装风机,把车间中产生的粉尘排到车间外部,排到车间外部的粉尘集聚到一起,然后作业人员将车间外集聚的粉尘利用工具再转移到收集袋中进行转运处理,粉尘的这种收集方式效率非常低,尤其是对粉尘产生量大的车间,而且作业人员转移车间外集聚的粉尘时,粉尘通常是敞开式的,很容易将粉尘吸到体内,给作业人员带来很大的健康隐患。
技术实现要素:
3.本发明的目的是提供一种粉尘收集系统,以解决上述技术问题中的至少一个。
4.根据本发明的一个方面,提供了一种粉尘收集系统,包括:
5.收集管路,
6.风机,风机设在收集管路上,风机用于将粉尘吸进收集管路中进行输送,
7.筒体,收集管路与筒体连通,
8.开关部件,开关部件设在筒体的底部以控制筒体底部的开闭,
9.输送装置,输送装置的一端设在开关部件的底部,输送装置将筒体中收集的粉尘输送至收集装置,
10.收集装置,收集装置设在输送装置的另一端,
11.控制器,控制器与风机、开关部件、输送装置均电连接,控制器发送控制信号至风机、开关部件、输送装置。
12.本发明的粉尘收集系统,收集管路的自由端安装在产生粉尘的车间中,在风机的作用下,车间中的粉尘会被吸进收集管路中并集聚到筒体中,当筒体中集聚一定量的粉尘或者集聚一定时间的粉尘后,控制器控制开关部件动作以打开筒体的底部,筒体中集聚的粉尘落入输送装置中,在输送装置的作用下,粉尘被自动输送进收集装置中,作业人员只要定时将收集装置进行转运处理即可,筒体中集聚的粉尘会定量或定时地落入输送装置中然后自动输送至收集装置中,粉尘的收集效率得到了大幅度地提升,从而确保车间中产生的粉尘可以及时地进行外排收集,另外,作业人员在粉尘收集和转运的过程中都不会接触到粉尘,只需直接转运收集装置即可,作业人员的健康可以得到保证。
13.在一些实施方式中,开关部件可以包括驱动装置、转轴和挡板,挡板沿转轴的长度方向设在转轴上,挡板位于筒体的外底部,
14.驱动装置驱动转轴转动以使挡板盖合在筒体的底部或者打开筒体的底部。
15.由此,当筒体中集聚一定时间的粉尘后,如:风机工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体中,然后控制器控制驱动装置工作,驱动装置驱动挡板
转动,从而将筒体的底部打开,筒体中集聚的粉尘落入输送装置中,然后控制器再次控制驱动装置工作,驱动装置驱动挡板反向转动,从而将筒体的底部盖合,挡板正向转动和反向转动的时间间隔可以事先在控制器中设置。
16.在一些实施方式中,开关部件可以包括转轴、挡板和气缸a,挡板的一侧沿转轴的长度方向设在转轴上,挡板位于筒体的外底部,
17.气缸a的活塞杆铰接在挡板上,气缸a驱动挡板盖合在筒体的底部或者打开筒体的底部。
18.由此,当筒体中集聚一定时间的粉尘后,如:风机工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体中,然后控制器控制气缸a工作,气缸a通过活塞杆拉动挡板转动,从而将筒体的底部打开,筒体中集聚的粉尘落入输送装置中,然后控制器再次控制气缸a工作,气缸a通过活塞杆推动挡板反向转动,从而将筒体的底部盖合,挡板正向转动和反向转动的时间间隔可以事先在控制器中设置。
19.在一些实施方式中,开关部件可以包括挡板、气缸b和滑轨,滑轨设在筒体的外底部,挡板的两侧滑设在滑轨中,挡板位于筒体的外底部,
20.气缸b的活塞杆与挡板连接,气缸b驱动挡板在滑轨上滑行以盖合筒体的底部或者打开筒体的底部。
21.由此,当筒体中集聚一定时间的粉尘后,如:风机工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体中,然后控制器控制气缸b工作,气缸b通过活塞杆带动挡板在滑轨上滑行,从而将筒体的底部打开,筒体中集聚的粉尘落入输送装置中,然后控制器再次控制气缸b工作,气缸b通过活塞杆带动挡板在滑轨上反向滑行,从而将筒体的底部挡住,挡板正向滑行和反向滑行的时间间隔可以事先在控制器中设置。
22.在一些实施方式中,开关部件可以是电动阀。由此,当筒体中集聚一定时间的粉尘后,如:风机工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体中,然后控制器控制电动阀打开,从而将筒体的底部打开,筒体中集聚的粉尘落入输送装置中,然后控制器控制电动阀闭合,从而将筒体的底部关闭,电动阀打开和闭合的时间间隔可以事先在控制器中设置。
23.在一些实施方式中,还可以包括箱体,箱体设在筒体的外底部,开关部件容置在箱体中,输送装置的一端设在箱体的底部且与箱体连通。由此,箱体可以对开关部件进行收纳和保护,且方便筒体与输送装置连通。
24.在一些实施方式中,收集装置可以是吨袋。由此,吨袋具有防潮、防尘、耐辐射、牢固安全的优点,而且在结构上具有足够的强度,由于吨袋装卸、搬运都很方便,装卸效率可以得到明显地提高。
25.在一些实施方式中,筒体中可以设有光电传感器,控制器与光电传感器电连接,光电传感器将检测到的筒体中粉尘料位的信号发送给控制器。由此,当筒体中的光电传感器检测到筒体中集聚一定量的粉尘后,光电传感器将检测到的粉尘料位信号发送给控制器,控制器控制开关部件动作以打开筒体的底部,筒体中集聚的粉尘落入输送装置中,在输送装置的作用下,粉尘被自动输送进收集装置中,当筒体中粉尘的料位未达到光电传感器的检测位置时,保持筒体的底部呈关闭状态,即开关部件不动作。
26.在一些实施方式中,输送装置可以包括罩体、传动带和驱动部件,
27.罩体的一端设在开关部件的底部,罩体的另一端与收集装置连通,
28.传动带设在罩体中,
29.驱动部件驱动传动带传动,传动带将筒体中收集的粉尘输送至收集装置。
30.由此,传动带可以将从筒体中落下的粉尘自动输送至收集装置中,无需再人工进行转移,另外,用于输送粉尘的传送带容置在罩体中可以有效防止粉尘扬起,确保粉尘不会对车间外的空气造成污染。
31.在一些实施方式中,传动带可以倾斜排布。由此,倾斜排布的传动带可以提高粉尘输送的效率,另外,也方便将输送装置与地面上的收集装置进行连接。
附图说明
32.图1为本发明一种实施方式的一种粉尘收集系统的结构示意图;
33.图2为本发明第二种实施方式的一种粉尘收集系统的结构示意图;
34.图3为本发明第三种实施方式的一种粉尘收集系统的结构示意图;
35.图4为本发明第四种实施方式的一种粉尘收集系统的结构示意图。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
37.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.实施例一:
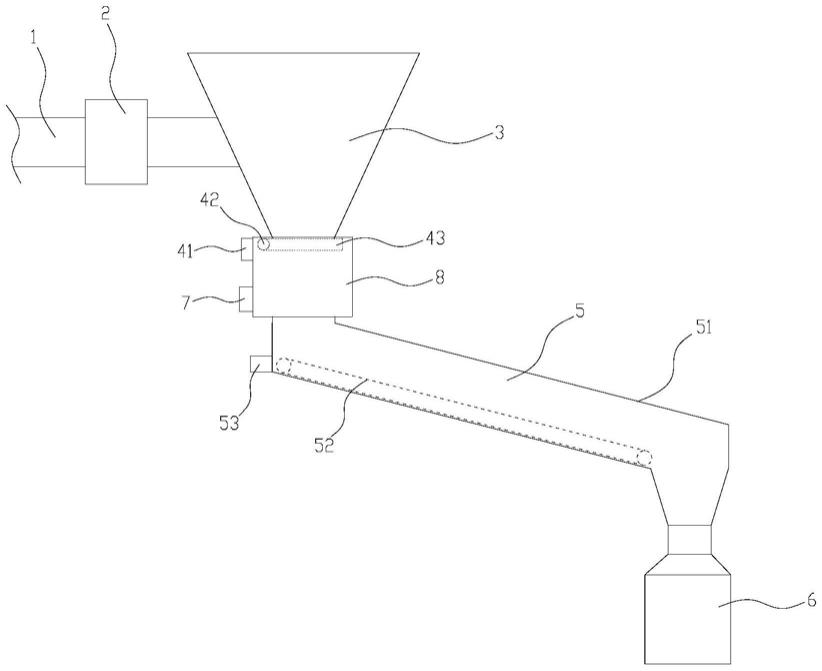
39.图1示意性地显示了本发明一种实施方式的一种粉尘收集系统的结构。
40.参考图1,一种粉尘收集系统,包括收集管路1、风机2、筒体3、开关部件、输送装置5、收集装置6和控制器7。此外,一种粉尘收集系统还可以包括箱体8。
41.参考图1,收集管路1左端的自由端可以安装在需要外排粉尘的车间中,为了方便收集粉尘,收集管路1左端的自由端可以安装一个喇叭状的集尘罩。
42.参考图1,风机2安装在收集管路1上,在风机2的抽吸作用下,车间中产生的粉尘可以被吸进收集管路1中,并在收集管路1中由左至右输送。
43.参考图1,收集管路1的右端安装在筒体3的侧部,收集管路1与筒体3内部的空间连通,即收集管路1中的粉尘在风机3的作用下可以被输送至筒体3中。
44.筒体3的顶部可以安装盖体,防止粉尘扬起。
45.筒体3的形状可以呈锥形状,即筒体3上端口的开口面积大于下端口的开口面积,这样可以方便粉尘从筒体3的底部落出。
46.参考图1,箱体8安装在筒体3的底部,开关部件容置在箱体8中,且开关部件安装在筒体3的外底部,开关部件可以控制筒体3底部的打开或关闭。
47.参考图1,开关部件包括驱动装置41、转轴42和挡板43。
48.参考图1,驱动装置41安装在箱体8上,可以安装在箱体8的外部也可以安装在箱体
8的内部,驱动装置41可以采用电机。
49.参考图1,转轴42安装在箱体8的内部,转轴42的两端可以通过轴承安装在箱体8的内壁上,驱动装置41可以驱动转轴42转动。
50.箱体8可以对开关部件进行收纳和保护,也方便筒体3与输送装置5连通。
51.参考图1,挡板43位于筒体3的外底部,挡板43的一侧沿转轴42的长度方向固定在转轴42上,转轴42转动时可以带动挡板43同步转动,以使挡板43盖合在筒体3的外底部或打开筒体3的外底部。当筒体3中集聚一定时间的粉尘后,如:风机2工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体3中,然后驱动装置41驱动挡板43顺时针转动(如:顺时针转动90度),从而将筒体3的底部打开,筒体3中集聚的粉尘从筒体3的底部落出,此时风机2可以停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,当筒体3中的粉尘都落出后,驱动装置41再驱动挡板43反向转动复位,从而将筒体3的底部盖合,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中。
52.参考图1,输送装置5的左端安装在箱体8的底部且与箱体8连通,筒体3中的粉尘可以通过箱体8落入输送装置5中。
53.参考图1,输送装置5包括罩体51、传动带52和驱动部件53。
54.参考图1,罩体51呈中空状,罩体51的左端安装在箱体8的底部,传动带52安装在罩体51中,驱动部件53安装在罩体51上,驱动部件53驱动传动带52传动,筒体3中的粉尘可以通过箱体8落入输送装置5中的传动带52上,在驱动部件53的驱动下,传送带52可以将粉尘向下游输送。
55.驱动部件53可以采用电机。
56.参考图1,罩体51的右端开口向下,收集装置6安装在罩体51的右端,传动带52可以将粉尘自动输送至下游端,然后传送带52上的粉尘可以滑入收集装置6中,从而完成粉尘的收集,无需再人工进行转移,另外,用于输送粉尘的传送带52容置在罩体51中可以有效防止粉尘扬起,确保粉尘不会对车间外的空气造成污染。
57.参考图1,传动带52倾斜排布,传动带52的左端高于传动带52的右端,即传动带52在罩体51中呈下坡趋势输送粉尘,倾斜排布的传动带52可以提高粉尘输送的效率,另外,传动带52呈倾斜排布,罩体51也对应的呈倾斜排布,倾斜排布的罩体51和传动带52方便将输送装置5与地面上的收集装置6进行连接。
58.参考图1,收集装置6采用吨袋,吨袋具有防潮、防尘、耐辐射、牢固安全的优点,而且在结构上具有足够的强度,由于吨袋装卸、搬运都很方便,装卸效率可以得到明显地提高。
59.参考图1,控制器7可以安装在箱体8上,控制器7可以选择单片机、微控制器或计算机等。
60.控制器7可以通过继电器以及信号线与风机2连接,控制器7可以通过继电器以及信号线与驱动装置41连接,控制器7可以通过继电器以及信号线与驱动部件53连接,控制器7可以发送开关信号给风机2从而控制风机2的工作/停止工作,控制器7可以发送开关信号给驱动装置41从而控制驱动装置41的工作/停止工作,控制器7可以发送开关信号给驱动部件53从而控制驱动部件53的工作/停止工作。
61.本实施例的工作模式:当风机2工作一定的时间t后,即筒体3中集聚了一定量的粉
尘,然后驱动装置41驱动挡板43转动以打开筒体3的底部,同时驱动部件53驱动传送带52传动,此时,筒体3中的粉尘开始落入传送带52上,同时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,传送带52将落下的粉尘输送至收集装置6中,当传动带52传送时间t1后,驱动装置41驱动挡板43转动以盖合在筒体3的底部,同时驱动部件53停止工作,即传动带52停止传送,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,此时,收集装置6中也收集到了足够的粉尘,然后进行转运即可;在时间t内,筒体3中集聚了一定量的粉尘,在时间t1内,筒体3中的粉尘可以全部落至传送带52上,风机2、驱动装置41、驱动部件53的工作模式可以事先在控制器7中进行设置。
62.在其他实施例中,粉尘从筒体3中的落出模式也可以为:在筒体3的内壁上安装光电传感器,光电传感器通过信号线与控制器7连接,光电传感器可以将检测到的筒体3中粉尘料位的信号发送给控制器7,当筒体3中的光电传感器检测到筒体3中集聚一定量的粉尘后,光电传感器将检测到的粉尘料位信号发送给控制器7,此时,控制器7控制驱动装置41驱动挡板43转动以打开筒体3的底部,同时驱动部件53驱动传送带52传动,同时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,当传动带52传送时间t2后,筒体3中的粉尘都落出,驱动装置41驱动挡板43转动以盖合在筒体3的底部,同时驱动部件53停止工作,即传动带52停止传送,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,此时,收集装置6中也收集到了足够的粉尘,在时间t2内,筒体3中的粉尘可以全部落至传送带52上;当筒体3中集聚的粉尘的料位未达到光电传感器的检测位置时,驱动装置41不动作即挡板43保持盖合在筒体3的底部,风机2保持工作状态,驱动部件53也不动作即传动带52不传送。
63.参考图1,本发明的粉尘收集系统,收集管路1的自由端安装在产生粉尘的车间中,在风机2的作用下,车间中的粉尘会被吸进收集管路1中并集聚到筒体3中,粉尘在筒体3中集聚一定时间后,驱动装置41驱动挡板43转动以打开筒体3的底部,筒体3中集聚的粉尘落入输送装置5中的传动带52上,此时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,在传动带52的作用下,粉尘被自动输送进收集装置6中,作业人员只要定时将收集装置6进行转运处理即可,当筒体3中的粉尘都落出后,驱动装置41再驱动挡板43复位,将筒体3的底部盖合,等待下一次筒体3中粉尘的落出,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,筒体3中集聚的粉尘会定时地落入输送装置5中然后自动输送至收集装置6中,粉尘的收集效率得到了大幅度地提升,从而确保车间中产生的粉尘可以及时地进行外排收集,另外,作业人员在粉尘收集和转运的过程中都不会接触到粉尘,只需直接转运收集装置6即可,作业人员的健康可以得到保证。
64.实施例二:
65.图2示意性地显示了本发明第二种实施方式的一种粉尘收集系统的结构。
66.参考图2,一种粉尘收集系统,包括收集管路1、风机2、筒体3、开关部件、输送装置5、收集装置6和控制器7。此外,一种粉尘收集系统还可以包括箱体8。
67.本实施例中,除了开关部件与实施一不同外,其他部件的结构以及连接关系均与实施一相同,在此不再赘述。
68.参考图2,开关部件包括转轴42、挡板43和气缸a44。
69.参考图2,转轴42安装在箱体8的内部,转轴42的两端可以通过轴承安装在箱体8的
内壁上。
70.参考图2,挡板43位于筒体3的外底部,挡板43的左侧沿转轴42的长度方向固定在转轴42上,气缸a44的活塞杆铰接在挡板43右侧的底部,气缸a44的缸体固定在箱体8的内壁上,气缸a44的活塞杆伸缩时可以带动挡板43绕着转轴42转动,以使挡板43盖合在筒体3的外底部或打开筒体3的外底部。当筒体3中集聚一定时间的粉尘后,如:风机2工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体3中,然后气缸a44的活塞杆拉动挡板43顺时针转动(如:顺时针转动90度),从而将筒体3的底部打开,筒体3中集聚的粉尘从筒体3的底部落出,此时风机2可以停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,当筒体3中的粉尘都落出后,气缸a44的活塞杆推动挡板43反向转动复位,从而将筒体3的底部盖合,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中。
71.控制器7可以通过继电器以及信号线与气缸a44连接,控制器7可以发送开关信号给气缸a44从而控制气缸a44的伸缩杆的推拉工作。
72.本实施例的工作模式:当风机2工作一定的时间t后,即筒体3中集聚了一定量的粉尘,然后气缸a44的活塞杆拉动挡板43顺时针转动以打开筒体3的底部,同时驱动部件53驱动传动带52传动,此时,筒体3中的粉尘开始落入传动带52上,同时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,传动带52将落下的粉尘输送至收集装置6中,当传动带52传送时间t1后,气缸a44的活塞杆推动挡板43反向转动复位,同时驱动部件53停止工作,即传动带52停止传送,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,此时,收集装置6中也收集到了足够的粉尘,然后进行转运即可;在时间t内,筒体3中集聚了一定量的粉尘,在时间t1内,筒体3中的粉尘可以全部落至传动带52上,风机2、气缸a44、驱动部件53的工作模式可以事先在控制器7中进行设置。
73.参考图2,本发明的粉尘收集系统,收集管路1的自由端安装在产生粉尘的车间中,在风机2的作用下,车间中的粉尘会被吸进收集管路1中并集聚到筒体3中,粉尘在筒体3中集聚一定时间后,气缸a44的活塞杆拉动挡板43转动以打开筒体3的底部,筒体3中集聚的粉尘落入输送装置5中的传动带52上,此时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,在传动带52的作用下,粉尘被自动输送进收集装置6中,作业人员只要定时将收集装置6进行转运处理即可,当筒体3中的粉尘都落出后,气缸a44的活塞杆再推动挡板43反向转动复位,将筒体3的底部盖合,等待下一次筒体3中粉尘的落出,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,筒体3中集聚的粉尘会定时地落入输送装置5中然后自动输送至收集装置6中,粉尘的收集效率得到了大幅度地提升,从而确保车间中产生的粉尘可以及时地进行外排收集,另外,作业人员在粉尘收集和转运的过程中都不会接触到粉尘,只需直接转运收集装置6即可,作业人员的健康可以得到保证。
74.实施例三:
75.图3示意性地显示了本发明第三种实施方式的一种粉尘收集系统的结构。
76.参考图3,一种粉尘收集系统,包括收集管路1、风机2、筒体3、开关部件、输送装置5、收集装置6和控制器7。此外,一种粉尘收集系统还可以包括箱体8。
77.本实施例中,除了开关部件与实施一不同外,其他部件的结构以及连接关系均与实施一相同,在此不再赘述。
78.参考图3,开关部件包括挡板43、气缸b45和滑轨46。
79.参考图3,滑轨46横向安装在箱体8的内壁上,箱体8相对的两个内壁上均横向安装一个滑轨46,挡板43的两侧分别容置在滑轨46中,挡板43可以沿着滑轨46在箱体8中横向滑行。
80.参考图3,气缸b45的活塞杆通过连接杆431与挡板43的右端连接,气缸b45的缸体安装在箱体8的内壁上,气缸b45的活塞杆伸缩时可以带动挡板43沿着滑轨46在左右方向上滑行,以使挡板43盖合在筒体3的外底部或打开筒体3的外底部。当筒体3中集聚一定时间的粉尘后,如:风机2工作了一定时间t,在这段时间t内,车间中的粉尘不断地集聚到筒体3中,然后气缸b45的活塞杆推动挡板43在滑轨46上向右滑行,从而将筒体3的底部打开,筒体3中集聚的粉尘或从筒体3的底部落出,此时风机2可以停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,当筒体3中的粉尘都落出后,气缸b45的活塞杆拉动挡板43向左滑行复位,从而将筒体3的底部盖合,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中。
81.控制器7可以通过继电器以及信号线与气缸b45连接,控制器7可以发送开关信号给气缸b45从而控制气缸b45的伸缩杆的推拉工作。
82.本实施例的工作模式:当风机2工作一定的时间t后,即筒体3中集聚了一定量的粉尘,然后气缸b45的活塞杆推动挡板43在滑轨46上滑行以打开筒体3的底部,同时驱动部件53驱动传动带52传动,此时,筒体3中的粉尘开始落入传动带52上,同时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,传动带52将落下的粉尘输送至收集装置6中,当传动带52传送时间t1后,气缸b45的活塞杆拉动挡板43反方向滑行复位,同时驱动部件53停止工作,即传动带52停止传送,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,此时,收集装置6中也收集到了足够的粉尘,然后进行转运即可;在时间t内,筒体3中集聚了一定量的粉尘,在时间t1内,筒体3中的粉尘可以全部落至传动带52上,风机2、气缸b45、驱动部件53的工作模式可以事先在控制器7中进行设置。
83.参考图3,本发明的粉尘收集系统,收集管路1的自由端安装在产生粉尘的车间中,在风机2的作用下,车间中的粉尘会被吸进收集管路1中并集聚到筒体3中,粉尘在筒体3中集聚一定时间后,气缸b45的活塞杆推动挡板43在滑轨46上滑行以打开筒体3的底部,筒体3中集聚的粉尘落入输送装置5中的传动带52上,此时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,在传动带52的作用下,粉尘被自动输送进收集装置6中,作业人员只要定时将收集装置6进行转运处理即可,当筒体3中的粉尘都落出后,气缸b45的活塞杆拉动挡板43反方向滑行复位,将筒体3的底部盖合,等待下一次筒体3中粉尘的落出,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,筒体3中集聚的粉尘会定时地落入输送装置5中然后自动输送至收集装置6中,粉尘的收集效率得到了大幅度地提升,从而确保车间中产生的粉尘可以及时地进行外排收集,另外,作业人员在粉尘收集和转运的过程中都不会接触到粉尘,只需直接转运收集装置6即可,作业人员的健康可以得到保证。
84.实施例四:
85.图4示意性地显示了本发明第四种实施方式的一种粉尘收集系统的结构。
86.参考图4,一种粉尘收集系统,包括收集管路1、风机2、筒体3、开关部件、输送装置5、收集装置6和控制器7。此外,一种粉尘收集系统还可以包括箱体8。
87.本实施例中,除了开关部件与实施一不同外,其他部件的结构以及连接关系均与
实施一相同,在此不再赘述。
88.参考图4,开关部件是电动阀47,电动阀47安装在筒体3的外底部,
89.控制器7与电动阀47连接,控制器7可以发送开关信号给电动阀47从而控制电动阀47阀门的开和关。
90.本实施例的工作模式:当风机2工作一定的时间t后,即筒体3中集聚了一定量的粉尘,然后电动阀47的阀门打开即筒体3的底部被打开,同时驱动部件53驱动传动带52传动,此时,筒体3中的粉尘开始落入传动带52上,同时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,传动带52将落下的粉尘输送至收集装置6中,当传动带52传送时间t1后,电动阀47的阀门关闭,同时驱动部件53停止工作,即传动带52停止传送,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,此时,收集装置6中也收集到了足够的粉尘,然后进行转运即可;在时间t内,筒体3中集聚了一定量的粉尘,在时间t1内,筒体3中的粉尘可以全部落至传动带52上,风机2、电动阀47、驱动部件53的工作模式可以事先在控制器7中进行设置。
91.参考图4,本发明的粉尘收集系统,收集管路1的自由端安装在产生粉尘的车间中,在风机2的作用下,车间中的粉尘会被吸进收集管路1中并集聚到筒体3中,粉尘在筒体3中集聚一定时间后,电动阀47的阀门打开,筒体3中集聚的粉尘落入输送装置5中的传动带52上,此时风机2停止工作,即此时收集管路1中的粉尘暂时不会集聚到筒体3中,在传动带52的作用下,粉尘被自动输送进收集装置6中,作业人员只要定时将收集装置6进行转运处理即可,当筒体3中的粉尘都落出后,电动阀47的阀门关闭,等待下一次筒体3中粉尘的落出,同时风机2启动工作,车间中的粉尘又不断地集聚到筒体3中,筒体3中集聚的粉尘会定时地落入输送装置5中然后自动输送至收集装置6中,粉尘的收集效率得到了大幅度地提升,从而确保车间中产生的粉尘可以及时地进行外排收集,另外,作业人员在粉尘收集和转运的过程中都不会接触到粉尘,只需直接转运收集装置6即可,作业人员的健康可以得到保证。
92.以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。