1.本发明属于先进制造与自动化领域,并涉及先进制造工艺与装备领域,尤其涉及机器人领域中的先进服务机器人及自动化生产线技术领域,具体涉及一种基于物联网的智能病房数据采集系统,并涉及该基于物联网的智能病房数据采集系统的方法。
背景技术:
2.采集病房数据可详细掌握病人在整个治疗过程中的身体状况,有利于对病人的病情进行分析,也可及时发现病人的异常情况;通过数据采集,可使储存大量的病人的治疗信息,有利于对多种病症信息进行分类分析,促进医学的发展。病房数据的采集是一项十分繁琐的工作,每个住院病人每天都会产生大量数据。目前对病房数据的采集方式为人工采集,医护人员需要每天测量病人的体温、血压等信息,还需要检查病人使用的监护仪器读数,由于人力有限,医护人员并不能经常检查监护仪器的数据,并且医护人员也不会对这些信息进行储存、整理,这些测量到的数据未被充分利用;病房内常用物品(如体温计、引流袋等)多有损耗,目前这些物品损耗为人工统计、更换,这种方式效率低且耗费人力较多。
技术实现要素:
3.本发明的目的在于提供一种可自动、高效采集数据的基于物联网的智能病房数据采集系统,并提供一种基于物联网的智能病房数据采集系统的方法。
4.基于上述目的,本发明采用如下技术方案:一种基于物联网的智能病房数据采集系统,包括采集系统,还包括与采集系统相配合的控制系统;采集系统包括设置在每个病房内的数据储存装置,还包括数据收集装置;数据收集装置包括移动平台,移动平台上设置有与数据储存装置相配合的文件收集装置和文件放置装置;移动平台上设置有摄像装置;移动平台内还设置有储物装置。
5.进一步的,数据存储装置包括夹持机构,还包括与夹持机构相配合的文件储存机构;夹持机构包括固连在病房墙壁上的夹持平台,夹持平台的横截面为直角梯形;夹持平台的横截面的高与墙壁贴合,夹持平台的横截面的上底比下底短;夹持平台包括倾斜的夹持面,夹持面的顶端相比夹持面的底端距离墙壁更近;夹持平台上设置有与夹持面相平行的夹持器;夹持器包括设置在夹持夹持面上的一对第一夹板,每个第一夹板均与夹持面相垂直,每个第一夹板均与夹持面滑动连接;每个第一夹板的长度方向均与夹持面的长度方向一致,夹持面的长度方向即为夹持平台横截面的斜边的方向;夹持面的左右两端固连有与第一夹板相平行的第一支撑板,一对第一夹板设置在一对第一支撑板之间;第一支撑板与第一夹板之间均设置有多个压簧,每个压簧均与夹持面相平行;一对第一夹板还连接有夹板打开机构。
6.进一步的,夹板打开机构包括在夹持平台内开设的第一滑槽,第一滑槽的长度方向与第一夹板的长度方向相垂直;第一滑槽内设置有一对第一滑板,每个第一滑板均与第一夹板固连;每个第一滑板与另一第一滑板相邻的一端均设置有倾斜的滑动连接面,每个
滑动连接面均与夹持面相垂直;第一滑槽内还设置有楔形块,楔形块设置在两个滑动连接面之间且与滑动连接面滑动连接,楔形块左右两侧设置有两个与滑动连接面相平行的面;第一滑槽内还开设有与其垂直的第二滑槽,第二滑槽内设置有与楔形块固连的第一限位滑块;楔形块上铰接有第一连接杆,第一连接杆的底端与楔形块铰接,顶端铰接有长杆状的省力手柄;夹持平台内开设有与第一滑槽相联通的第一空腔,省力手柄设置在第一空腔内;省力手柄一端铰接有第一固定轴,第一固定轴垂直省力手柄设置,第一固定轴与夹持平台固连;省力手柄的另一端设置在夹持平台外。省力手柄、第一连接杆、楔形块、第一滑槽、第一滑板均与夹持面相平行。
7.进一步的,文件储存机构包括设置在一对第一夹板之间的第三支撑板;第三支撑板顶部设置有电动夹,电动夹包括与第三支撑板相平行的第二夹板,第二夹板上连接有第一电动伸缩杆;第一电动伸缩杆固连在第三支撑板上,第一电动伸缩杆与第三支撑板成锐角设置,第一电动伸缩杆的伸长方向为倾斜向上伸长;第三支撑板底端设置有与第一电动伸缩杆连接的开关,此开关为非自锁开关;夹持平台的顶部开设有第一凹槽,第一凹槽将夹持平台的顶端与第三支撑板连通。
8.进一步的,文件收集装置包括与开关相配合的第一压块,第一压块设置在开关的下方,第一压块下方连接有竖直的第二电动伸缩杆,第二电动伸缩杆的底端和移动平台固连;第一压块上还连接有升降梯,升降梯远离第一压块的一端设置有收集盒;升降梯包括首端斜板和尾端斜板,还包括设置在首端斜板与尾端斜板之间的多个中间斜板,首端斜板、尾端斜板和中间斜板均相互平行且倾斜设置;首端斜板的顶端与第一压块固连,首端斜板包括在其底部固连的滑块;每个中间斜板均包括与滑块滑动连接的滑轨,滑轨均在中间斜板的两侧竖直设置,每个中间斜板均包括在其底部固连的滑块;尾端斜板与中间斜板结构相同,尾端斜板的顶部固连有滑轨、底部固连有滑块,收集盒上固连有与尾端斜板上的滑块相连接的滑轨。
9.进一步的,收集盒顶端铰接有一对对称的门板,每个门板与收集盒之间均设置有自动关闭机构;每个门板上均连接有同步打开机构;同步打开机构包括一端与门板固连的第一连接绳,第一连接绳的另一端与尾端斜板上的滑块固连;同步打开机构还包括与第一连接绳滑动连接的滑轮组,滑轮组包括设置在门板一侧的第一定滑轮,第一定滑轮设置在收集盒的上方;滑轮组还包括连接在收集盒上的第二定滑轮,第二定滑轮的高度位置位于收集盒上的滑轨的底部;滑轮组还包括设置在第一定滑轮与第二定滑轮之间的转向滑轮;第一定滑轮、第二定滑轮和转向滑轮的轴均与收集盒固连。
10.进一步的,收集盒为方形结构,收集盒内还设置有送纸机构,送纸机构包括水平设置的第二支撑板;第二支撑板固连在收集盒与升降梯相邻的壁上,第二支撑板的左右两侧设置有水平的第三滑槽,第三滑槽开设在收集盒左右两侧的壁上,第三滑槽设置在第二支撑板的上方;每个第三滑槽均连接有输送器,每个输送器均包括设置在第三滑槽内的第二滑板,每个第二滑板均连接有水平的第三电动伸缩杆,每个第三电动伸缩杆的长度方向均与第三滑槽的长度方向一致;第二滑板上连接有第一转轴和第二转轴,第一转轴连接有第四电机;第一转轴和第二转轴上套上有环形带,环形带设置在第二支撑板的上方且与第二支撑板相平行;环形带的外环面上设置有软质的挤压层。
11.进一步的,文件放置装置包括与开关相配合的第二压块,第二压块下方连接有竖
直的第四电动伸缩杆,第四电动伸缩杆底端与移动平台固连;第二压块上连接有放纸机构,放纸机构包括与第二压块铰接的第一转动轴,第一转轴为水平设置,第一转轴的长度方向为左右方向,第一转动轴一端连接有第一电机,第一电机与第二压块固连;第一转动轴的外周面上固连有连接板,连接板上连接有取纸器;文件放置装置还包括与取纸器相配合的纸张储存盒,纸张储存盒为顶端开口的方形结构,纸张储存盒靠近第一转动轴的壁(前侧的壁)上开设有竖直槽,竖直槽将纸张储存盒内部与外部连通,竖直槽与连接板相配合且设置在连接板的正下方。
12.进一步的,取纸器包括在连接板两侧转动连接的一对取纸板,取纸板为长板结构,取纸板的长度方向与纸张储存盒的长度方向一致,纸张储存盒的长度方向为前后方向;一对取纸板之间固连有水平的第二连接杆;每个取纸板的底端均设置有压力传感器;每个取纸板的底端均设置有吸气口,取纸板与连接板内设置有与吸气口相连通的吸气通道,连接板上固连有与吸气通道相连通的吸风机;其中一个取纸板上固连有第一从动齿轮,第一从动齿轮啮合连接有第一主动齿轮,第一主动齿轮连接有第二电机,第二电机与连接板固连。纸张储存盒上部设置有水平的电动门。
13.进一步的,控制系统包括控制模块,第二电动伸缩杆、第三电动伸缩杆、第四电动伸缩杆、第一电机、第二电机、压力传感器、电动门均与控制模块连接。
14.进一步的,储物装置包括在移动平台内设置的一排储物抽屉,每个储物抽屉均为水平设置,每个储物抽屉均与移动平台滑动连接;每个储物抽屉上均连接有第一锁定机构和第二锁定机构;第一锁定机构包括多个第一弹簧,每个储物抽屉与移动平台之间均设置有第一弹簧;每个第一弹簧均为水平设置,且与储物抽屉的滑动方向一致,储物抽屉的长度方向与其滑动方向一致,储物抽屉延移动平台的前后方向滑动;第一锁定机构还包括与每个储物抽屉连接的卷盘收放器。
15.进一步的,卷盘收放器包括与每个储物抽屉的尾端连接的第三滑轮,每个第三滑轮均设置在储物抽屉宽度方向的中间位置,每个第三滑轮均水平设置;每个第三滑轮的两侧均设置有一对对称的张紧滑轮,每个张紧滑轮均与第三滑轮位于同一水平面内;多个第三滑轮与张紧轮上连接有一个第二连接绳,第二连接绳水平设置;第二连接绳的一端连接有卷盘,卷盘连接有与其同轴且竖直设置的第三电机;第二连接绳的另一端与移动平台固连;第三电机连接有密码锁,第三电机与密码锁均与控制模块连接。
16.进一步的,第二锁定机构包括锁止器,锁止器包括固连在储物抽屉尾端的水平杆,水平杆的长度方向与储物抽屉的宽度方向一致;锁止器还包括设置在水平杆上方的水平板,水平板上固连有竖直板,水平杆设置在竖直板与储物抽屉之间;水平板左右两侧还固连有一对竖直向下的支撑杆,每个支撑杆上均固连有水平的第三连接杆,每个第三连接杆上均套设有桶状的弹杆,每个弹杆均为水平设置,弹杆与第三连接杆的长度方向均与储物抽屉的长度方向一致;每个第三连接杆与弹杆之间均设置有拉簧,每个拉簧的长度方向均与弹杆的长度方向一致;两个弹杆远离第三连接杆的一端固连有一个水平的第二固定轴,第二固定轴与弹杆相垂直,第二固定轴上铰接有竖直的锁止板;水平杆设置在锁止板与竖直板之间;锁止板设置在水平板的下方,锁止板靠近竖直板的一侧设置有挡块,挡块与水平板固连;水平板上均连接有升降器。弹杆上固连有第一磁铁,锁止板上设置有与第一磁铁相吸的第二磁铁。
17.进一步的,升降器包括杠杆组,杠杆组一端与水平板固连,另一端连接有弹性按钮;杠杆组包括与水平板顶端固连的第四连接杆,第四连接杆为竖直设置;第四连接杆的顶端铰接有第五连接杆,第五连接杆的另一端铰接有第一杠杆,第一杠杆的中间位置转动连接有水平的第三固定轴,第三固定轴与第一杠杆的长度方向相垂直;第一杠杆的长度方向与储物抽屉的宽度方向一致;第一杠杆远离第三连接杆的一端铰接有第六连接杆,第六连接杆另一端铰接有第二杠杆,第二杠杆的长度方向与储物抽屉的长度方向一致,第二杠杆的中间位置转动连接有水平的第四固定轴;第四固定轴与第二杠杆的长度方向相垂直;第二杠杆远离第一杠杆的一端铰接有第七连接杆,第七连接杆另一端铰接有第三杠杆,第三杠杆的长度方向与第二杠杆一致,第三杠杆的中间位置转动连接有第五固定轴,第五固定轴与第四固定轴相平行;弹性按钮设置在第三杠杆远离第二杠杆的一端。第三固定轴、第四固定轴、第五固定轴均与移动平台固连;第二杠杆设置在第一杠杆上方,第三杠杆设置在第二杠杆上方,弹性按钮设置在第三杠杆上方。每个储物抽屉上连接的第二锁定机构的第一杠杆的长度不同,第一杠杆的长度按每个第二锁定机构的水平板和与其对应的弹性按钮的横向距离(储物抽屉的宽度方向的距离)设置。
18.上述的基于物联网的智能病房数据采集系统的方法包括以下步骤:步骤1,病房仪器数据监控;控制模块控制移动平台按照设定的路线在各个病房巡视;控制模块控制调整摄像装置,对病房内的仪器显示的数据、图像等进行拍摄、对比。
19.步骤2,病人数据测量、记录;医护人员检查病人体温、血压等体征时,下压省力手柄从数据储存装置中取下第三支撑板,将测量到的病人体征数据填入第三支撑板的纸张上。
20.步骤3,病人数据储存;控制模块控制移动平台按设定路线移动至病房内的数据存储装置前;控制模块控制摄像装置调整位置,并对第三支撑板上的纸张拍照、上传;控制模块控制移动平台移动,文件收集装置移动至数据储存装置下方的中间位置;控制模块控制文件收集装置收集纸张。
21.步骤4,纸张添加;纸张收集完毕后,控制模块控制移动平台移动,文件放置装置移动至数据储存装置下方的中间位置;控制模块控制文件放置装置将纸张放至第三支撑板上。
22.与现有技术相比,本发明具有以下有益效果:1、文件储存机构可将带有病人数据的纸张夹持存放,夹持机构可将文件储存机构夹持固定,使纸张在固定位置规范化储存,方便数据收集装置采集病人数据。夹持平台的夹持面倾斜设置可使纸张倾斜,使纸张在重力作用下贴在第三支撑板上并保持稳定,方便文件收集装置进行收集。医护人员测量病人的体温、血压等数据时,可取下文件储存机构,将测量每个病人得到的数据填入文件储存机构上的纸张上。夹板打开机构可方便医护打开第一夹板,方便取放文件储存机构。
23.2、下压夹板打开机构的省力手柄可使省力手柄带动楔形块下移,楔形块下移可带动两个第一滑板背向运动,将第一夹板打开。将省力手柄、第一连接杆、楔形块、第一滑槽和第一滑板均设置在夹持平台的内部,可使夹持机构的结构更加紧凑,减少占用空间。
24.3、文件储存机构的第二夹板连接第一电动伸缩杆,且将第一电动伸缩杆倾斜设置;使电动夹打开时,第一电动伸缩杆能够带动第二夹板向上移动,方便文件放置装置将纸
张放到第三支撑板与第二夹板之间,保证文件放置装置稳定运行。
25.4、文件收集装置的第二电动伸缩杆可带动第一压块上升,使第一压块压下开关,使第一电动伸缩杆伸长,使纸张自动滑落。第一压块上升可带动首端斜板上升,首端斜板通过滑块与滑轨可带动中间斜板和尾端斜板上升,最终使首端斜板、尾端斜板和中间斜板组成一个倾斜的滑板,使纸张能够经过首端斜板、尾端斜板和中间斜板滑落至收集盒中。
26.5、门板可将收集盒顶端封闭,保护收集盒内部不受污染;自动关闭机构可使收集盒保持关闭状态,也可使收集盒在打开时具有关闭的趋势。同步打开机构可使门板在纸张进入收集盒时自动打开;第一连接绳通过滑轮组与尾端斜板的滑块连接,在尾端斜板上升时,第一连接绳可带动门板自动打开,使纸张进入收集盒。将第二定滑轮设置在收集盒上的滑轨的底部,使尾端斜板的滑块上升时,将第一连接绳拉起,使门板打开。在纸张进入收集盒后,将升降梯复位,自动关闭机构可带动门板自动关闭。
27.6、送纸机构可使纸张完全进入收集盒,使纸张能够顺利平铺在收集盒的底部,便于将纸张整理整齐。当纸张未能在重力作用下完全进入收集盒时,纸张斜躺在收集盒的前侧的壁上,此时第三电动伸缩杆伸长,使输送器移动至第二支撑板上,挤压层将纸张夹持在第二支撑板上,第四电机可带动第一转轴转动进而带动挤压层转动,挤压层将纸张向后输送至纸张完全落入收集盒的底端。
28.7、文件放置装置可将纸张自动放至文件储存机构,使医护人员记录病人数据时,可直接将第三支撑板取下进行记录,无需医护人员再将纸张放入文件储存机构,可减少医护人员的工作量,提高数据收集的效率。第四电动伸缩杆可将第二压块升高至与开关接触,将电动夹打开,取纸器可从纸张储存盒中取出纸张;第一电机可带动第一转动轴转动,使取纸器转动至第三支撑板上,调整好纸张的位置,方便电动夹将纸张夹持在第三支撑板上。
29.8、取纸器使用取纸板通过负压将纸张吸起,将取纸板放在纸张上方即可,方便取纸;第二电机与第一主动齿轮、第二从动齿轮连接,可调整取纸板的转动角度,将纸张放置到第一支撑板上,方便电动夹夹持纸张;风机可调节风力大小进而调节吸力,使纸张被稳定吸附。电动门可避免杂物进入纸张储存盒。
30.9、储物装置可方便医护人员从移动平台内获取常用物品,方便医护人员及时将一些损坏物品更换,并可统计常用物品的损耗情况。第一锁定机构的第一弹簧可使储物抽屉保持打开的趋势,卷盘与第二连接绳和第三滑轮、张紧滑轮连接,可拉紧储物抽屉,使储物抽屉保持关闭状态;将储物抽屉连接在同一个第二连接绳上,使卷盘收放第二连接绳时可作用到任意一个储物抽屉,使任意一个储物抽屉完成收放;由密码锁控制卷盘的收放,可避免非工作人员随意打开储物抽屉。第二锁定机构可使储物抽屉保持锁定状态,每个第二锁定机构的按钮均对应一个储物抽屉,可分开控制不同的储物抽屉;第一锁定机构与第二锁定机构配合,使储物抽屉技既能被同一密码锁控制,又能使用弹性按钮控制特定的储物抽屉开闭。
31.10、弹性按钮可通过杠杆组控制锁止器的升降,方便操作。锁止器的水平杆设置在锁止板和竖直板之间,可通过阻挡水平杆进而使储物抽屉保持关闭的状态。按下弹性按钮后,杠杆组带动水平板上升,水平板带动支撑杆、第三连接杆、弹杆、第二固定轴和锁止板上升,锁止板底端上升至水平杆上方后,拉簧压缩并带动弹杆、第二固定轴和锁止板向支撑杆的方向移动;当松开弹性按钮后,水平板在自身重力作用下下移,并带动锁止板下移,锁止
板下移至水平杆上后停止,水平杆被解锁,此时第一锁定机构可控制此解锁的储物抽屉开闭。挡块可防止锁止板底端向靠近储物抽屉的方向转动,使锁止板能够稳定阻挡水平杆移动。第一磁铁和第二磁铁相吸可使锁止板在下降时保持竖直状态,使锁止板下降时能稳定被水平杆阻挡,保证按下弹性按钮后,水平杆能被顺利解锁。
32.11、控制模块通过控制第二电动伸缩杆、第三电动伸缩杆、第四电动伸缩杆、第一电机、第二电机、第三电机、压力传感器、电动门、卷盘可使采集系统的各个装置自动、有序工作。
33.综上所述,本发明的数据存储装置可方便医护人员将病房内的病人数据规范化整理、储存。文件收集装置能够自动收集数据存储装置上的数据;文件收集装置的第一压块与电动夹的开关相配合,可使带有数据的纸张自动落入收集盒内;送纸机构可将纸张进一步整理,使纸张自动平铺在收集盒底端;同步打开机构和自动关闭机构能够使门板配合升降梯自动打开和关闭收集盒。文件放置装置能够将纸张自动放置到数据储存装置上,减少医护人员的工作量;文件放置装置的第二压块能够与电动夹的开关配合,可使电动夹自动打开,第一电机与取纸器配合,可自动取纸、放纸。摄像装置可自动巡视病房,监控各个病房的仪器,加强对病人数据的收集。储物装置可方便医护人员取用常用物品。本发明可自动巡视病房,收集病房仪器数据,可自动收集病人每日的体征数据,并自动将文件保留存档,属于智能制造技术领域。
附图说明
34.图1为本发明实施例1的示意图;图2为本发明实施例1的数据存储装置的侧视图;图3为本发明实施例1的存储装置的主视图;图4为本发明实施例1的夹持机构的示意图;图5为本发明实施例1的夹板打开机构的结构示意图;图6为图5的局部放大图;图7为本发明实施例1的第一滑板与第一夹板的连接示意图;图8为本发明实施例1的文件储存机构的侧视图;图9为本发明实施例1的文件收集装置的示意图;图10为图9的局部放大图;图11为本发明实施例1的同步打开机构的示意图;图12为图11的局部放大图;图13为本发明实施例1的自动关闭机构的示意图;图14为本发明实施例1的送纸机构的示意图;图15为图13的局部放大图;图16为本发明实施例1的输送器的示意图;图17为本发明实施例1的文件放置装置的示意图;图18为图16的局部放大图;图19为本发明实施例1的取纸器的示意图;图20为本发明实施例1的取纸板的示意图;
图21为本发明实施例3的整理机构的示意图;图22为本发明实施例4的示意图;图23为本发明实施例4的储物装置的示意图;图24为本发明实施例4的第一锁定机构的示意图;图25为图22的局部放大图;图26为图23的局部放大图;图27为本发明实施例4的第三连接杆与弹杆连接的示意图;图28为本发明实施例4的杠杆组的示意图。
35.图中:数据储存装置1、移动平台2、文件收集装置3、文件放置装置4、摄像装置5、储物装置6、夹持平台101、墙壁7、夹持面102、第一夹板103、第一支撑板104、压簧105、第一滑槽106、第一滑板107、第四滑槽108、连接块109、滑动连接面110、楔形块111、第二滑槽112、第一限位滑块113、第一连接杆114、省力手柄115、第一空腔116、第一固定轴117、第三支撑板118、第二夹板119、第一电动伸缩杆120、开关121、第一凹槽122、连通槽123、第一压块301、第二电动伸缩杆302、收集盒303、首端斜板304、尾端斜板305、中间斜板306、滑块307、滑轨308、门板309、第二凹槽310、第二弹簧311、第一连接绳312、第一定滑轮313、第二定滑轮314、转向滑轮315、第二支撑板316、第三滑槽317、第二滑板318、第三电动伸缩杆319、第一转轴320、第二转轴321、第四电机322、第二主动齿轮323、第二从动齿轮324、环形带325、挤压层326、滑动板327、第二限位滑块、第五滑槽329、第五电动伸缩杆、第二压块401、第四电动伸缩杆402、第一转动轴403、第一电机404、连接板405、纸张储存盒406、竖直槽407、取纸板408、第二连接杆409、压力传感器410、吸气口411、吸气通道412、吸风机413、第一从动齿轮414、第一主动齿轮415、第二电机416、电动门417、储物抽屉601、第一弹簧602、第三滑轮603、张紧滑轮604、第二连接绳605、卷盘606、第三电机607、密码锁608、水平杆609、水平板610、竖直板611、支撑杆612、第三连接杆613、弹杆614、拉簧615、第二固定轴616、锁止板617、挡块618、第一磁铁619、弹性按钮621、第四连接杆622、第五连接杆623、第一杠杆624、第三固定轴625、第六连接杆626、第二杠杆627、第四固定轴628、第七连接杆629、第三杠杆630、第五固定轴631、第二空腔632。
具体实施方式
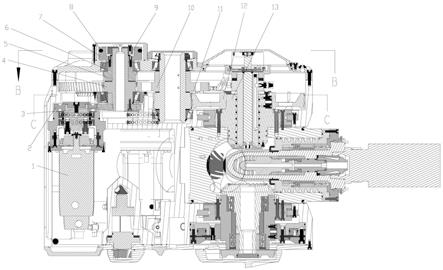
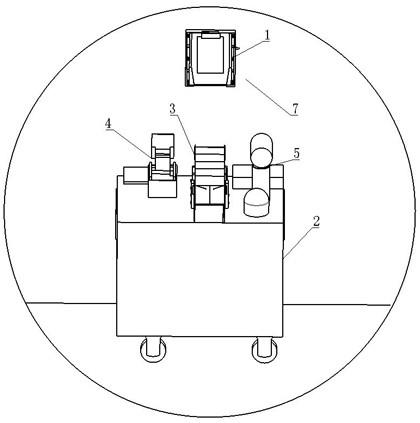
36.实施例1一种基于物联网的智能病房数据采集系统,如图1
‑
20所示,包括采集系统,还包括与采集系统相配合的控制系统;如图1所示,采集系统包括设置在每个病房内的数据储存装置1,还包括数据收集装置;数据收集装置包括移动平台2,移动平台2上设置有与数据储存装置1相配合的文件收集装置3和文件放置装置4;移动平台2上设置有摄像装置5;移动平台2内还设置有储物装置6,移动平台还包括移动装置,移动装置由控制系统控制移动。
37.摄像装置5包括摄像机,摄像机连接有第六电动伸缩杆,第六电动伸缩杆在摄像机的下方竖直设置,摄像机在第六电动伸缩杆上转动设置,摄像机可绕电动伸缩杆在水平方向转动。
38.如图2
‑
4所示,数据存储装置包括夹持机构,还包括与夹持机构相配合的文件储存机构;夹持机构包括固连在病房墙壁7上的夹持平台101,夹持平台101的横截面为直角梯
形;夹持平台101的横截面的高与墙壁7贴合,夹持平台101的横截面的上底比下底短;夹持平台101包括倾斜的夹持面102,夹持面102的顶端相比夹持面102的底端距离墙壁7更近;夹持平台101上设置有与夹持面102相平行的夹持器;夹持器包括设置在夹持夹持面102上的一对对称的第一夹板103,每个第一夹板103均与夹持面102相垂直,每个第一夹板103均与夹持面102滑动连接;每个第一夹板103的长度方向均与夹持面102的长度方向一致,夹持面102的长度方向即为夹持平台101横截面的斜边的方向;夹持面102的左右两端固连有与第一夹板103相平行的第一支撑板104,一对第一夹板103设置在一对第一支撑板104之间;第一支撑板104与第一夹板103之间均设置有多个压簧105,每个压簧105均与夹持面102相平行;一对第一夹板103还连接有夹板打开机构。
39.如图5
‑
7所示,夹板打开机构包括在夹持平台101内开设的第一滑槽106,第一滑槽106的长度方向与第一夹板103的长度方向相垂直;第一滑槽106内设置有一对对称的第一滑板107,每个第一滑板107均与第一夹板103固连;夹持面102左右两侧开设有与第一滑槽106连通的一对第四滑槽108,每个第四滑槽108内均设置有连接块109,每个连接块109的两端分别与第一滑板107和第一夹板103固连;每个第一滑板107与另一第一滑板107相邻的一端均设置有倾斜的滑动连接面110,每个滑动连接面110均与夹持面102相垂直;第一滑槽106内还设置有楔形块111,楔形块111设置在两个滑动连接面110之间且与滑动连接面110滑动连接,楔形块111的横截面为顶端长于底端的等腰梯形,两个第一滑板107对称设置,楔形块111左右两侧设置有两个与滑动连接面110相平行的面;第一滑槽106内还开设有与其垂直的第二滑槽112,第二滑槽112内设置有与楔形块111固连的第一限位滑块113;楔形块111上铰接有第一连接杆114,第一连接杆114的底端与楔形块111铰接,顶端铰接有长杆状的省力手柄115;夹持平台101内开设有与第一滑槽106相联通的第一空腔116,省力手柄115设置在第一空腔116内,第一空腔116与夹持平台101的右侧壁连通;第一空腔116与第一滑槽106平行且设置在第一滑槽106的上方,第一空腔116与第一滑槽106之间开设有与其垂直的连通槽123,连通槽123将第一空腔116与第一滑槽106连通,第一连接杆114设置在连通槽123内;省力手柄115一端铰接有第一固定轴117,第一固定轴117垂直省力手柄115设置,第一固定轴117与夹持平台101固连;省力手柄115的另一端设置在夹持平台101外。省力手柄115、第一连接杆114、楔形块111、第一滑槽106、第一滑板107均与夹持面102相平行。
40.如图8所示,文件储存机构包括设置在一对第一夹板103之间的第三支撑板118;第三支撑板118顶部设置有电动夹,电动夹包括与第三支撑板118相平行的第二夹板119,第二夹板119上连接有第一电动伸缩杆120;第一电动伸缩杆120固连在第三支撑板118上,第一电动伸缩杆120与第三支撑板118成锐角设置,第一电动伸缩杆120的伸长方向为倾斜向上伸长;第三支撑板118底端设置有与第一电动伸缩杆120连接的开关121,此开关121为非自锁开关121;夹持平台101的顶部开设有第一凹槽122,第一凹槽122将夹持平台101的顶端与第三支撑板118连通。
41.如图9
‑
10所示,文件收集装置3包括与开关121相配合的第一压块301,第一压块301设置在开关121的下方,第一压块301下方连接有竖直的第二电动伸缩杆302,第二电动伸缩杆302的底端和移动平台2固连;第一压块301上还连接有升降梯,升降梯远离第一压块301的一端设置有收集盒303;升降梯包括首端斜板304和尾端斜板305,还包括设置在首端斜板304与尾端斜板305之间的两个中间斜板306,首端斜板304、尾端斜板305和中间斜板
306均相互平行且倾斜设置;首端斜板304的顶端与第一压块301固连,首端斜板304包括在其底部固连的滑块307,滑块307设置在首端斜板304的左右两侧;每个中间斜板306均包括与滑块307滑动连接的滑轨308,滑轨308均在中间斜板306的两侧竖直设置,滑轨308均在中间斜板306的顶端固连,每个中间斜板306均包括在其底部固连的滑块307,滑块307设置在中间斜板306的左右两侧;尾端斜板305与中间斜板306结构相同,尾端斜板305的顶部固连有滑轨308、底部固连有滑块307,收集盒303上固连有与尾端斜板305上的滑块307相连接的滑轨308。
42.如图11
‑
13所示,收集盒303为顶端开口的方形结构,收集盒303顶端铰接有一对对称的门板309,每个门板309与收集盒303之间均设置有自动关闭机构;自动关闭机构包括在收集盒303顶端开设的第二凹槽310,第二凹槽310内设置有第二弹簧311,第二弹簧311的底端与第二凹槽310的底端固连,第二弹簧311的顶端与门板309固连;每个门板309上均连接有同步打开机构;同步打开机构包括一端与门板309固连的第一连接绳312,第一连接绳312的另一端与尾端斜板305上的滑块307固连;同步打开机构还包括与第一连接绳312滑动连接的滑轮组,滑轮组包括设置在门板309一侧的第一定滑轮313,第一定滑轮313设置在收集盒303的上方;滑轮组还包括连接在收集盒303上的第二定滑轮314,第二定滑轮314的高度位置位于收集盒303上的滑轨308的底部;滑轮组还包括设置在第一定滑轮313与第二定滑轮314之间的转向滑轮315;第一定滑轮313、第二定滑轮314和转向滑轮315的轴均与收集盒303左右两侧的壁固连。
43.如图14
‑
16所示,收集盒303内还设置有送纸机构,送纸机构包括水平设置的第二支撑板316;第二支撑板316固连在收集盒303与升降梯相邻的壁上,第二支撑板316的左右两侧设置有水平的第二凹槽317,第二凹槽317开设在收集盒303左右两侧的壁上,第二凹槽317设置在第二支撑板316的上方;每个第二凹槽317均连接有输送器,每个输送器均包括设置在第二凹槽317内的第二滑板318,每个第二滑板318均连接有水平的第三电动伸缩杆319,每个第三电动伸缩杆319的长度方向均与第二凹槽317的长度方向一致;第二滑板318上连接有第一转轴320和第二转轴321,第一转轴320连接有第四电机322;第四电机322的轴上连接有第二主动齿轮323,第一转轴320上固连有与第二主动齿轮323啮合连接的第二从动齿轮324;第一转轴320和第二转轴321上套上有环形带325,环形带325设置在第二支撑板316的上方且与第二支撑板316相平行;环形带325的外环面上设置有软质的挤压层326。
44.如图17
‑
20所示,文件放置装置4包括与开关121相配合的第二压块401,第二压块401下方连接有竖直的第四电动伸缩杆402,第四电动伸缩杆402底端与移动平台2固连;第二压块401上连接有放纸机构,放纸机构包括与第二压块401铰接的第一转动轴403,第一转轴320为水平设置,第一转轴320的长度方向为左右方向,第一转动轴403一端连接有第一电机404,第一电机404与第二压块401固连;第一转动轴403的外周面上固连有连接板405,连接板405上连接有取纸器;文件放置装置4还包括与取纸器相配合的纸张8储存盒406,纸张8储存盒406为顶端开口的方形结构,纸张8储存盒406靠近第一转动轴403的壁(前侧的壁)上开设有竖直槽407,竖直槽407将纸张8储存盒406内部与外部连通,竖直槽407与连接板405相配合且设置在连接板405的正下方。
45.取纸器包括在连接板405两侧转动连接的一对对称的取纸板408,取纸板408为长板结构,取纸板408的长度方向与纸张8储存盒406的长度方向一致,纸张8储存盒406的长度
方向为前后方向;一对取纸板408之间固连有水平的第二连接杆409;每个取纸板408的底端均设置有压力传感器410;每个取纸板408的底端均设置有吸气口411,取纸板408、第二转轴321与连接板405内设置有与吸气口411相连通的吸气通道412,连接板405上固连有与吸气通道412相连通的吸风机413;其中一个取纸板408上固连有第一从动齿轮414,第一从动齿轮414啮合连接有第一主动齿轮415,第一主动齿轮415连接有第二电机416,第二电机416与连接板405固连。纸张8储存盒406上部设置有水平的电动门417。
46.控制系统包括控制模块,第二电动伸缩杆302、第三电动伸缩杆319、第四电动伸缩杆402、第一电机404、第二电机416、压力传感器410、电动门417、摄像装置5均与控制模块连接;控制模块还连接有报警器,报警器设置在移动平台2上。
47.实施例2本实施例为采用如下方法的基于物联网的智能病房数据采集系统,包括以下步骤,步骤1,病房仪器数据监控。控制模块控制移动平台2按照设定的路线在各个病房巡视;移动平台2移动至病房内时,控制模块控制第六电动伸缩上升,调节摄像机高度;控制模块控制摄像机转动,调节摄像机角度,摄像机调整好后对病房内的仪器显示的数据、图像等进行拍摄;若仪器数据异常(超出设定值),控制模块控制报警器发出声音,提醒医护人员对病人进行救治。
48.步骤2,病人数据测量、记录。医护人员检查病人体温、血压等体征时,下压数据储存装置1的省力手柄115;省力手柄115绕第一固定轴117转动并带动第一连接杆114和楔形块111下移,楔形块111上的斜面下移并挤压第一滑板107的滑动连接面110,两个第一滑板107向背运动并带动两个第一夹板103向背运动,压簧105压缩;取下第三支撑板118,松开省力手柄115,将测量到的病人体征数据填入第三支撑板118的纸张8上,填入数据后,压下省力手柄115,将第三支撑板118放回。初次使用时,手动将纸张8放在第三支撑板118上,用电动夹夹持纸张。
49.步骤3,病人数据储存。医护人员每天记录病人的体征数据后(设定时间),控制模块控制移动平台2按设定路线移动至病房内的数据存储装置前;控制模块控制摄像装置5调整摄像机位置,并对第三支撑板118上的纸张8拍照,并将照片上传至数据库;拍摄照片后控制模块控制移动平台2移动,文件收集装置3移动至数据储存装置1下方的中间位置;控制模块控制第二电动伸缩杆302上升,第二电动伸缩杆302带动压块和首端斜板304上升;首端斜板304的滑块307移动至中间斜板306的滑轨308顶部时带动中间斜板306上升,中间斜板306最终带动尾端斜板305上升至收集盒303顶端;尾端斜板305上升后,尾端斜板305的滑块307带动第一连接绳312与其连接的一端上升,第一连接绳312与门板309连接的一端与第一定滑轮313之间的距离缩短,第一连接绳312带动门板309打开,第二弹簧311伸长。压块触动开关121后,第一电动伸缩杆120伸长,第二夹板119向斜上方移动,电动夹打开,纸张8落入首端斜板304,并经过中间斜板306与尾端斜板305滑落至收集盒303内;控制模块控制第三电动伸缩杆319伸长,使输送器移动至第二支撑板316上,挤压层326将纸张8挤压在第二支撑板316上,第四电机322转动并带动第一转轴320转动进而带动环形带325与挤压层326转动,挤压层326将纸张8向后输送至纸张8完全落入收集盒303的底端。控制模块控制第三电动伸缩杆319复位,并第二电动伸缩杆302下降复位,电动夹与升降梯自动复位;第二弹簧311压
缩,门板309在第二弹簧311的拉力作用下关闭。
50.步骤4,记录用纸张8添加。纸张8收集完毕后,控制模块控制移动平台2移动,文件放置装置4移动至数据储存装置1下方的中间位置;控制模块控制电动门417打开,控制模块控制第四电动伸缩杆402下降,当压力常感器感应到压力达到设定值时,控制模块控制吸风机413打开,取纸板408将顶端的纸张8吸起;控制模块控制第四电动伸缩杆402上升,并控制电动门417关闭,第四电动伸缩杆402带动第二压块401和连接板405上升;第二压块401触碰开关121,电动夹打开,控制模块控制第二电机416转动180
°
,第二电机416带动第一主动齿轮415和第一从动齿轮414转动,第一从动齿轮414带动取纸板408和纸张8翻转180
°
;控制模块控制第一电机404转动设定角度,第一电机404带动第一转动轴403、连接板405、取纸板408和纸张8转动,使纸张8与第三支撑板118平行;控制模块控制第二电动伸缩杆302下降至设定位置(下降一小段距离),开关121与电动夹复位,第二夹板119将纸张8夹持在第三支撑板118上;控制模块控制吸风机413关闭,并控制第一电机404与第二电机416复位,同时控制第四电动伸缩杆402下降复位。
51.步骤5,循环步骤3与步骤4,收集每个病房的数据。
52.实施例3与实施例1相比,本实施例的收集盒303内还设置有整理机构,如图21所示,整理机构包括设置在收集盒303底端的滑动板327,滑动板327为竖直设置;滑动板327底端和左右侧面固连有第二限位滑块,收集盒303底端和左右内壁上开设有第五滑槽329,第二限位滑块均设置在第五滑槽329内且与第五滑槽329滑动连接;第五滑槽329的长度方向均与收集盒303的长度方向一致,也即收集盒303的前后方向;滑动板327设置在收集盒303的前部,滑动板327上连接有第五电动伸缩杆,第五电动伸缩杆与收集盒303的底端固连,第五电动伸缩杆的长度方向与第五滑槽329的长度方向一致。
53.工作时,与实施例2相比,本实施例在步骤3中第三电动伸缩杆319复位后,控制模块控制第五电动伸缩杆伸长,第五电动伸缩杆带动滑动板327向后移动,滑动板327推动纸张8,将纸张8整理整齐;控制模块控制第五电动伸缩杆复位。
54.实施例4与实施例3相比,本实施例的储物装置6包括在移动平台2内设置的一排储物抽屉601,如图22
‑
28所示,移动平台2内开设有四个储物槽,每个储物槽内均滑动连接有一个储物抽屉601;每个储物抽屉601均为水平设置,每个储物抽屉601均与移动平台2滑动连接;每个储物抽屉601上均连接有第一锁定机构和第二锁定机构;第一锁定机构包括多个第一弹簧602,每个储物抽屉601与移动平台2之间均设置有第一弹簧602;每个第一弹簧602均为水平设置,且与储物抽屉601的滑动方向一致,储物抽屉601的长度方向与其滑动方向一致,储物抽屉601延移动平台2的前后方向滑动;第一锁定机构还包括与每个储物抽屉601连接的卷盘606收放器。移动平台2内开设有第二空腔632,第一锁定机构和第二锁定机构设置在第二空腔632内。
55.如图24所示,卷盘606收放器包括与每个储物抽屉601的尾端连接的第三滑轮603,每个第三滑轮603均设置在储物抽屉601宽度方向的中间位置,每个第三滑轮603均水平设置;每个第三滑轮603的两侧均设置有一对对称的张紧滑轮604,每个张紧滑轮604均与第三滑轮603位于同一水平面内;多个第三滑轮603与张紧轮上连接有一个第二连接绳605,第二
连接绳605水平设置;第二连接绳605的一端连接有卷盘606,卷盘606连接有与其同轴且竖直设置的第三电机607;第二连接绳605的另一端与移动平台2固连;第三电机607连接有密码锁608,第三电机607与密码锁608均与控制模块连接。
56.如图25
‑
27所示,第二锁定机构包括锁止器,锁止器包括固连在储物抽屉601尾端的水平杆609,水平杆609的长度方向与储物抽屉601的宽度方向一致;锁止器还包括设置在水平杆609上方的水平板610,水平板610上固连有竖直板611,水平杆609设置在竖直板611与储物抽屉601之间;水平板610左右两侧还固连有一对对称且竖直向下的支撑杆612,每个支撑杆612上均固连有水平的第三连接杆613,每个第三连接杆613上均套设有桶状的弹杆614,每个弹杆614均为水平设置,弹杆614与第三连接杆613的长度方向均与储物抽屉601的长度方向一致;每个第三连接杆613与弹杆614之间均设置有拉簧615,每个拉簧615的长度方向均与弹杆614的长度方向一致;两个弹杆614远离第三连接杆613的一端固连有一个水平的第二固定轴616,第二固定轴616设置在水平杆609的上方,第二固定轴616与弹杆614相垂直,第二固定轴616上铰接有竖直的锁止板617;水平杆609设置在锁止板617与竖直板611之间;锁止板617设置在水平板610的下方,锁止板617靠近竖直板611的一侧设置有挡块618,挡块618与水平板610固连;水平板610上均连接有升降器。弹杆614上固连有第一磁铁619,锁止板617上设置有与第一磁铁619相吸的第二磁铁。
57.如图28所示,升降器包括杠杆组,杠杆组一端与水平板610固连,另一端连接有弹性按钮621;杠杆组包括与水平板610顶端固连的第四连接杆622,第四连接杆622为竖直设置;移动平台2内开设有竖直的限位孔,第四连接杆622设置在限位孔内,使第四连接杆622保持竖直移动;第四连接杆622的顶端铰接有第五连接杆623,第五连接杆623的另一端铰接有第一杠杆624,第一杠杆624的中间位置转动连接有水平的第三固定轴625,第三固定轴625与第一杠杆624的长度方向相垂直;第一杠杆624的长度方向与储物抽屉601的宽度方向一致;第一杠杆624远离第三连接杆613的一端铰接有第六连接杆626,第六连接杆626另一端铰接有第二杠杆627,第二杠杆627的长度方向与储物抽屉601的长度方向一致,第二杠杆627的中间位置转动连接有水平的第四固定轴628;第四固定轴628与第二杠杆627的长度方向相垂直;第二杠杆627远离第一杠杆624的一端铰接有第七连接杆629,第七连接杆629另一端铰接有第三杠杆630,第三杠杆630的长度方向与第二杠杆627一致,第三杠杆630的中间位置转动连接有第五固定轴631,第五固定轴631与第四固定轴628相平行;弹性按钮621设置在第三杠杆630远离第二杠杆627的一端。第三固定轴625、第四固定轴628、第五固定轴631均与移动平台2固连;第二杠杆627设置在第一杠杆624上方,第三杠杆630设置在第二杠杆627上方,弹性按钮621设置在第三杠杆630上方。每个储物抽屉601上连接的第二锁定机构的第一杠杆624的长度不同,第一杠杆624的长度按每个第二锁定机构的水平板610和与其对应的弹性按钮621的横向距离(储物抽屉601的宽度方向的距离)设置。控制系统还包括在每个病房内均设置的呼叫装置。
58.与实施例3相比,本实施例在工作时,医护人员在病房需要更换常用物品时,医护人员启动呼叫装置,呼叫装置将信号发送至控制模块,控制模块控制移动平台2移动至该病房内;医护人员按下所需物品对应的弹性按钮621,弹性按钮621下移带动第三杠杆630的前端下移、后端上移,第三杠杆630通过第七连接杆629带动第二杠杆627前端上移、后端下移,第二杠杆627通过第六连接杆626带动第一杠杆624左端下移、右端上移,第一杠杆624通过
第五连接杆623带动第四连接杆622和水平板610上移;水平板610带动支撑杆612、第三连接杆613、弹杆614、第二固定轴616和锁止板617上升,锁止板617底端上升至水平杆609上方后,拉簧615压缩并带动弹杆614、第二固定轴616和锁止板617向支撑杆612的方向移动;当松开弹性按钮621后,水平板610在自身重力作用下下移,并带动锁止板617下移,锁止板617下移至水平杆609上后停止,水平杆609被解锁;通过密码锁608输入密码,启动卷盘606,卷盘606正转将第二连接绳605放松,解锁的储物抽屉601在第一弹簧602的弹力作用下弹出;储物抽屉601打开一段时间(设定时间)后,控制模块控制第三电机607带动卷盘606反转,卷盘606拉动第二连接绳605,储物抽屉601缩回、关闭,第二弹簧311压缩;当水平杆609移动至与锁止板617接触后继续向前移动,并带动锁止板617转动至水平杆609的上方;当水平杆609继续移动至离开至锁止板617后,锁止板617在重力作用和第一磁铁619、第二磁铁的作用下转动至竖直状态;控制模块控制第三电机607带动卷盘606正转复位,第二连接绳605放松,储物抽屉601在带动水平杆609复位,使水平杆609被锁止板617阻挡,避免锁止板617上升并下降后继续锁住水平杆609。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。