1.本发明涉及一种农业机械,具体为一种电动旋耕机,是能自动避让障碍物的电缆连接式电动旋耕机。
背景技术:
2.传统和高能耗的农业机械已不能满足对智慧农机的机械化和智能化的要求,旋耕机是与拖拉机配套完成耕、耙和犁作业的耕耘机械,具有打破犁底层、恢复土壤耕层结构、提高土壤蓄水保墒能力、消灭部分杂草、减少病虫害、平整地表以及提高农业机械化作业标准等作用,但在使用过程中,常遇到有损旋耕机设备的障碍物等问题,旋耕机不能够灵活处理,无法实现旋耕机高度调节或实现不同区域耕深。
3.中国专利公开号为cn209089351u的文献中提出了一种农业旋耕机高度调节装置,它通过传动柱和齿轮齿板的配合抬升旋耕机,以实现旋耕机的高度调节。但此装置只能在竖直方向上抬升,不能灵活地实现在旋耕机前进方向的左右两端高度的独立调节。中国专利公开号为cn209861493u的文献公开的农业旋耕机高度调节装置,采用螺纹杆、螺纹管和电机的组合结构,通过电机的驱动,带着螺纹杆和螺纹管发生作用,从而使旋爪的高度发生改变,其只是在竖直方向上抬升相同的高度,也无法实现在旋耕机在前进方向的左右两端高度的独立调节的问题。因此,传统的拖拉机与旋耕机的高度调节仅限于在竖直方向上抬升相同的水平高度,另一方面,传统的拖拉机与旋耕机的连接方式为刚性连接,这不仅会降低旋耕机的输出扭矩而且还增加驾驶员的疲劳感。传统的旋耕机避障装置主要依靠与拖拉机间的机械悬挂机构进行避障,该避障方式不够灵活且自动化程度低。
技术实现要素:
4.本发明提出了一种可自动避障的电缆连接式电动旋耕机以及其自动避障的方法,旨在一方面能够根据障碍物的位置和形状准确独立灵活地控制电动旋耕机的高度变化以实现自动避障,另一方面,旋耕机与拖拉机的连接方式采用电缆式,驱动形式为电力驱动齿轮传动,这既降低了能量损耗又提高了旋耕机的工作效率。
5.为实现上述目的,本发明一种可自动避障的电缆连接式电动旋耕机采用的技术方案是:包括机壳、旋转轴、旋爪和两个驱动轮,机壳上表面设有电动机和齿轮箱,电动机带动齿轮箱工作,机壳左右两侧各设有一个液压升降装置,液压升降装置包括液压油缸和液压杆,液压油缸固定连接机壳,液压杆上下布置,液压杆的上端是伸缩端,伸在液压油缸中,液压杆的下端固定连接驱动轮支撑架上端,驱动轮支撑架下端支撑着驱动轮,驱动轮支撑在路面上;在机壳的前侧左右位置处分别各设置一个摄像头和一个毫米波雷达,每个液压油缸上设置一个高度传感器,其中一个车轮支撑架的下端处设置一个速度传感器,所述的摄像头、毫米波雷达、高度传感器和速度传感器以及驱动轮、液压升降装置均分别连接控制器。
6.所述的电缆连接式电动旋耕机的避障方法采用的技术方案是包括以下步骤:
7.步骤1:当电动旋耕机前方存在障碍物时,摄像头、毫米波雷达、高度传感器和速度传感器采集相应的信息,并将该信息传送至控制器;
8.步骤2:控制器根据信息判断障碍物是否在左右两个摄像头和毫米波雷达前方的中间区域,如果是,控制器控制两个液压升降装置同时伸长,抬升电动旋耕机以越过障碍物;如果不在中间区域,执行步骤3:
9.步骤3:判断障碍物是否在前方左侧区域或者右侧区域,如果是,控制器控制左侧的液压升降装置或者右侧的液压升降装置工作,抬升电动旋耕机左侧或者右侧以越过障碍物;
10.步骤4:控制器根据摄像头、毫米波雷达、高度传感器和速度传感器传来的实时信息判断电动旋耕机是否越过障碍物。
11.本发明采用上述技术方案后的有益效果:
12.1.本发明能自动地识别障碍物位置和形状,根据障碍物的位置、形状、尺寸、相对障碍物的位置以及电动旋耕机本身的结构和尺寸信息,通过控制液压升降装置升降电动旋耕机,独立调节旋耕机前进方向的左右两端高度,以实现自动避障,同时可以根据地面实际情况决定耕深。
13.2.与传统的机械式连接方式相比,本发明电动旋耕机通过电缆与拖拉机连接,二者相对独立工作。采用的电缆连接式不仅提升了旋耕机的输出扭矩,提高了旋耕机的工作效率,而且使得驾驶员因感觉不到电动旋耕机工作时的振动而具有一定的舒适性,进而降低了驾驶疲劳。
14.3.本发明电动旋耕机的驱动方式为电力驱动齿轮传动,提高了传递效率,达到了环保节能的效果。采用电力驱动方式具有更强的输出扭矩,电动旋耕机工作时的输出转矩可以根据工作强度的改变而改变。
附图说明
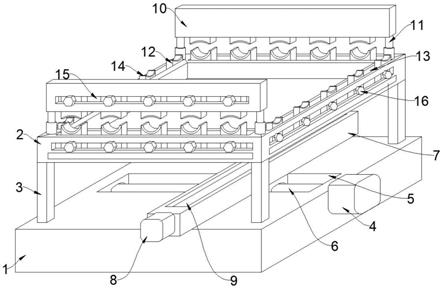
15.图1为本发明一种可自动避障的电缆连接式电动旋耕机的结构图;
16.图2为图1中液压升降装置7和驱动轮12的结构爆炸放大图;
17.图3为图1中齿轮箱内部结构示意图;
18.图4为图1的控制原理框图;
19.图5为图1所示电动旋耕机在前方有障碍物时的工作状态示意图;
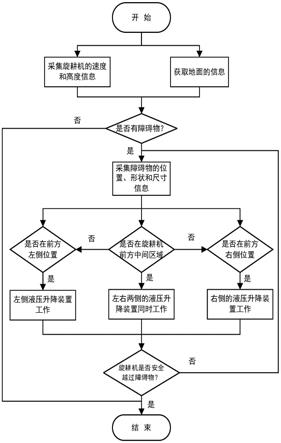
20.图6是图1所示电动旋耕机实现自动避障的方法流程图。
21.图中:1、电缆;2、电动机;2a、电动机输出轴;3、齿轮箱;3a、电动机输出轴齿轮;3b、输入齿轮;3c、输入轴;3d、第一齿轮;3e、第二齿轮;3f、输出轴;3g、联轴器;3h、输出齿轮;3i、旋转轴齿轮;4、壳体;5、旋转轴;6、旋爪;7、液压升降装置;7a、液压油缸;7b、液压杆;8、高度传感器;9、平土托板;10、平土托板轮支撑架;11、平土托板轮;12、驱动轮;13、速度传感器;14、驱动轮支撑架;15、摄像头;16、毫米波雷达;17、障碍物;18、控制器;19、螺栓;20、螺母;21、驱动轮轴;22、轴承。
具体实施方式
22.为了便于理解,特规定本发明一种可自动避障的电缆连接式电动旋耕机的空间方
位:规定以图1中旋转轴5所在位置为“前”,平土托板9所在位置为“后”;齿轮箱3所在位置为“上”,驱动轮12所在的位置为“下”。
23.如图1和图2所示,本发明电动旋耕机包括机壳4、旋转轴5、旋爪6、驱动轮12等。机壳4上表面用螺栓固定安装电动机2和齿轮箱3。电动机2左右水平布置,电动机2的输出轴方向是齿轮箱3,带动齿轮箱3工作。电动机2通过电缆1连接前方的拖拉机,电缆1为电动机2和驱动轮12提供电能。
24.机壳4的下方连接左右水平布置的旋转轴5,旋转轴5左右两端通过轴承20连接机壳4。在旋转轴5上,用螺栓和螺母固定安装多个旋爪6,多个旋爪6沿旋转轴5的轴向布置。
25.机壳4的后上方连接平土托板9,平土托板9通过销连接于机壳4的后方,平土托板9的下端通过平土托板轮支撑架10连接平土托板轮11。平土托板9下方左右两端各有一个平土托板轮支撑架10和平土托板轮11,左右两端的两个平土托板轮支撑架10结构相同,沿机壳4中心左右对称布置;两个平土托板轮11结构相同,也沿机壳4中心左右对称布置。
26.机壳4左右两侧各设有一个液压升降装置7,如图2所示,液压升降装置7包括液压油缸7a和液压杆7b。液压油缸7a固定连接在机壳4上,液压杆7b上下布置,液压杆7b的上端是伸缩端,伸在液压油缸7a中,液压杆7b的下端固定连接于驱动轮支撑架14上端,一个驱动轮支撑架14下端支撑着一个驱动轮12,左右两个驱动轮12支撑在路面上。液压升降装置7工作时,液压杆7b能向上伸出,能够带动整个机壳4向上升起。机壳4左右两侧的液压升降装置7结构相同,沿机壳4的中心左右对称布置。左右两端侧的驱动轮12结构也相同,分别沿机壳4的中心左右对称布置。
27.液压油缸7a通过螺栓19固定在机壳4上,一个驱动轮12同轴套在一个驱动轮轴21上,驱动轮轴21左右水平,并且左右两端分别连接于驱动轮支撑架14的下端,用螺母20紧固。
28.在机壳4的前侧左右位置处分别固定设置一个摄像头15和一个毫米波雷达16,一个摄像头15和一个毫米波雷达16为一组,左右各一组设置,两组摄像头15和毫米波雷达16沿机壳4的中心左右对称布置。用来实时获取前方地面的障碍物的形状位置信息。在一个液压升降装置7的液压油缸7a上面设置一个高度传感器8,两个高度传感器8沿机壳4的中心左右对称布置,用来获取电动旋耕机的实时高度信息。在其中一个车轮支撑架14的下端处设置一个速度传感器13,用来获取电动旋耕机的实时速度。
29.如图1和图3所示,电动机2将动力经电动机输出轴2a传递到齿轮箱3中。电动机2的输出轴是电动机输出轴2a,电动机输出轴2a伸入齿轮箱3内部,在齿轮箱3内,电动机输出轴2a上套有电动机输出轴齿轮3a,电动机输出轴齿轮3a啮合正下方的输入齿轮3b,输入齿轮3b和第一齿轮3d同轴套在输入轴3c上。输入轴3c的下方是输出轴3f,输出轴3f上同轴套有第二齿轮3e和输出齿轮3h,第一齿轮3d和第二齿轮3e相啮合,在第二齿轮3e和输出齿轮3h之间设置联轴器3g,以在电动旋耕机工作过载的情况下保护电动机2。输出轴3f的下方是旋耕机旋转轴5,旋耕机旋转轴5上同轴套有旋转轴齿轮3i,该旋转轴齿轮3i与输出齿轮3h相啮合。电动机输出轴2a、输入轴3c、输出轴3f、旋耕机旋转轴5从上至下布置,并且相互平行,中心轴均左右水平,其中,输入轴3c和输出轴3f的左右两端均通过轴承连接于齿轮箱3上的箱体上。动力从电动机输出轴2a依次经电动机输出轴齿轮3a、输入齿轮3b、第一齿轮3d、第二齿轮3e、输出齿轮3h、旋转轴齿轮3i传递到旋耕机旋转轴5,带动旋耕机旋转轴5旋转,从
而带动带动旋爪6运转,完成电动旋耕机的动力传递。
30.如图1和图4所示,机壳4上还安装控制器18,控制器18由电缆1提供电能。高度传感器8、速度传感器13、摄像头15和毫米波雷达16均经信号线连接控制器18,将采集到信息传送给控制器18。控制器18分别经控制线连接液压升降装置7和驱动轮12,控制液压升降装置7的升降和驱动轮12的启停。
31.如图5所示,电动旋耕机正常工作时,控制器18控制驱动轮12转动,带动旋耕机向前行驶,正常工作。摄像头15、毫米波雷达16、高度传感器8和速度传感器13通过信号线分别连接控制器18,控制器18经控制线分别连接驱动轮1和液压升降装置7。摄像头15、毫米波雷达16、高度传感器8和速度传感器13实时监测地面随时可能出现的障碍物17,获取地面障碍物17和电动旋耕机的实时信息传到控制器18中,以确保电动旋耕机正常工作。
32.当电动旋耕机前方区域出现对旋爪6造成损害的障碍物17而影响其正常工作时,摄像头15识别出障碍物17的形状和尺寸,获得障碍物17本身的最高高度h和前后最长长度x。毫米波雷达16测出障碍物17与机壳4最前侧的实时距离x1,高度传感器8获得电动旋耕机在旋耕作业时高度传感器8距离地面的高度h1,速度传感器13测量出电动旋耕机的行进速度v。摄像头15、毫米波雷达16、高度传感器8和速度传感器13将获取的最高高度h、前后最长长度x、实时距离x1、高度h1以及行进速度v这些实时信息传送到控制器18中。控制器18根据传来的实时信息,结合预存在控制器18中的电动旋耕机本身的尺寸,判断液压升降装置7的工作长度h2,即液压杆7b向上伸长的长度h2。其中,电动旋耕机本身的尺寸包括:电动旋耕机的前后总长度x2、初始高度h0,即旋爪6刚接触地面时高度传感器8测得的高度传感器8离地面的高度。则控制器18可计算出电动旋耕机要安全越过障碍物17时液压升降装置7的工作长度h2=h1‑
h0 h δh,δh为液压杆7b伸长的修正值,设为定值1cm,安全越过障碍物17所需的时间控制器18在时间t后,向液压升降装置7发送解除工作的指令,液压杆7b回到正常状态,电动旋耕机回归到正常工作状态。
33.当障碍物17出现在左侧的摄像头15和毫米波雷达16的工作区域时,左侧的摄像头15识别出障碍物的形状、尺寸,即障碍物17本身的最高高度h和前后长度x,以及相对电动旋耕机的位置。毫米波雷达16测出障碍物17与电动旋耕机的实时距离x1,高度传感器8测量出在电动旋耕机正常旋耕作业时高度传感器8离地面的高度h1,速度传感器13测量出电动旋耕机的行进速度v。左侧的摄像头15、毫米波雷达16、高度传感器8和速度传感器13将获取的实时信息传送到控制器18中。控制器18根据传来的实时信息,结合预存在控制器18中的电动旋耕机本身的尺寸,计算出液压杆7b所伸长的长度h2以及电动旋耕机安全越过障碍物17所需的时间t。左侧的液压升降装置7根据控制器18发来的指令将高压液压油注入液压油缸7a腔内,进而驱动液压杆7b伸长,将电动旋耕机左侧抬升,从而避开障碍物17。控制器18在时间t后向左侧的液压升降装置7发送解除工作的指令,液压杆7b收缩到正常状态,电动旋耕机回归到正常工作。
34.同理,当障碍物17出现在右侧的摄像头15和毫米波雷达16的工作区域时,右侧的摄像头15识别出障碍物17的形状、尺寸,即障碍物17本身的最高高度h和前后长度x,以及相对电动旋耕机的位置。毫米波雷达16测出障碍物17与电动旋耕机的实时距离x1,高度传感器8测量出在电动旋耕机正常旋耕作业时高度传感器8离地面的高度h1,速度传感器13测量
出电动旋耕机的行进速度v。右侧的摄像头15、毫米波雷达16、高度传感器8和速度传感器13将获取的实时信息传送到控制器18中。控制器18根据传来的实时信息,结合预存在控制器18中的电动旋耕机的尺寸,计算出液压杆7b所伸长的长度h2以及电动旋耕机安全越过障碍物17所需的时间t。右侧的液压升降装置7根据控制器18发来的指令将高压液压油注入液压油缸7a腔内,进而驱动液压杆7b伸长,将电动旋耕机右侧抬升,从而避开障碍物17。控制器18在时间t后向右侧的液压升降装置7发送解除工作的指令,液压杆7b收缩到正常状态,电动旋耕机回归到正常工作。
35.当障碍物17出现在左右两侧的摄像头15和毫米波雷达16的工作区域时,左右两侧的摄像头15同时识别出障碍物的形状、尺寸以及相对电动旋耕机的位置。左右两侧的毫米波雷达16测出障碍物17与电动旋耕机的实时距离x1,高度传感器8测量出在电动旋耕机正常旋耕作业时高度传感器8离地面的高度h1,速度传感器13测量出电动旋耕机的行进速度v。左右两侧的摄像头15、毫米波雷达16、高度传感器8和速度传感器13将获取的实时信息传送到控制器18中。控制器18根据传来的实时信息,结合预存在控制器18中的电动旋耕机的尺寸,计算出液压杆7b所伸长的长度h2以及电动旋耕机安全越过障碍物17所需的时间t。左右两侧的液压升降装置7根据控制器18发来的指令将高压液压油注入,进而驱动液压杆7b伸长,带动电动旋耕机抬升至相同的高度,从而避开障碍物17。控制器18在时间t后向左右两侧的液压升降装置7发送解除工作的指令,液压杆7b收缩到正常状态,电动旋耕机回归到正常工作。
36.如图6所示,电动旋耕机实现自动避障的具体方法是:
37.步骤1:摄像头15和毫米波雷达16获取地面的实时信息,高度传感器8和速度传感器13采集电动旋耕机实时的速度和高度信息,并将相应的信息全部传送至控制器18。
38.步骤2:控制器18根据接收的信息,判断电动旋耕机前方是否存在障碍物17。当不存在障碍物17时,电动旋耕机正常工作,结束操作。反之,当电动旋耕机前方存在障碍物17时,则进行信息识别。
39.步骤3:摄像头15和毫米波雷达16采集障碍物17的形状、尺寸和相对电动旋耕机的位置信息,并将该信息传送至控制器18。
40.步骤4:控制器18首先判断障碍物17是否在两侧的摄像头15和毫米波雷达16前方的中间区域,如果是,则控制器18发送工作指令到左右两侧的液压升降装置7作伸长工作,进而抬升电动旋耕机以越过障碍物17,如果障碍物17不在中间区域,则执行下一步。
41.步骤5:控制器18判断障碍物17是否出现在前方右侧区域,如果障碍物17在右侧,则控制器18便向右侧的液压升降装置7发送工作指令产生高压油进而驱动液压杆7b伸长工作,抬升电动旋耕机右侧以越过障碍物17。障碍物17在电动旋耕机工作区域的前方左侧区域时,则控制器18便向左侧的液压升降装置7发送工作指令产生高压油进而驱动液压杆7b伸长,抬升电动旋耕机左测以越过障碍物17。
42.步骤6:控制器18根据摄像头15、毫米波雷达16、高度传感器8和速度传感器13传来的实时信息判断电动旋耕机是否安全越过了障碍物17,若电动旋耕机主体4未安全越过,则返回步骤2。若安全越过,则结束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。