1.本发明涉及遥感影像技术领域,特别是涉及一种卫星影像非均匀薄云去除方法及系统。
背景技术:
2.遥感影像的应用越来越广泛,对于遥感影像的质量要求也随之提高。高分辨率卫星影像获取费用昂贵,而云覆盖图像降低了影像的使用率,大约80%的光学遥感影像都会受到云的干扰导致利用价值降低,这会增加影像获取成本。通过有效的遥感影像去云和信息恢复处理,可以更大程度地利用获取的数据,保证信息顺利收集的同时降低使用成本,因此,遥感影像去除薄云技术具有重要的研究意义和实际应用价值。
3.遥感影像的云覆盖表现出局部非均匀覆盖和全覆盖云厚度分布不均匀的特点。现有的遥感图像薄云去除技术主要利用去雾领域方法进行全影像的薄云去除,缺乏非均匀云去除算法。造成非均匀云去除不彻底,或者无云区域影像色彩失真严重。
4.遥感影像中非均匀薄云覆盖的区域同时包含了云和地物的信息,因此很多研究都着重于去除薄云,重建地物信息。这是遥感影像的一个重要的预处理步骤,通过去云产生的深度信息也对后续信息的处理和卫星影像的应用有着重要作用。
技术实现要素:
5.本发明的目的是提供一种卫星影像非均匀薄云去除方法及系统,以实现非均匀薄云遮盖下卫星影像细节信息的重建同时确保卫星影像色彩保真。
6.为实现上述目的,本发明提供了如下方案:
7.一种卫星影像非均匀薄云去除方法,包括:
8.采集卫星有云遥感数据;所述卫星有云遥感数据包括三个波段数据,分别为r波段数据、g波段数据以及b波段数据;
9.对所述卫星有云遥感数据进行筛选和归一化处理,得到筛选数据和归一化数据;所述筛选数据包括极端像素数据和极端像素数据对应的位置信息数据;
10.根据所述归一化数据,选取三个波段数据的最小值数据构建第一矩阵;
11.对所述第一矩阵中预设大小的矩阵块进行最小滤波处理,得到暗通道矩阵;
12.选取所述暗通道矩阵中的最亮的n个像素点位置对应的归一化数据中的像素数据构建第二矩阵;
13.对所述第二矩阵中的像素值求平均,得到大气光;
14.根据所述大气光和所述暗通道矩阵计算透射率图;
15.根据所述透射率图和所述大气光确定第一还原数据;
16.根据所述位置信息数据对所述极端像素数据进行还原,得到第二还原数据;
17.基于所述第一还原数据和所述第二还原数据得到去云后的遥感图像。
18.进一步地,所述对所述卫星有云遥感数据进行筛选和归一化处理,具体包括:
19.筛选所述卫星有云遥感数据中像素值最高的2%像素数据和最低的2%像素数据,构成极端像素数据,并统计所述极端像素数据对应的位置信息数据;所述第一极端像素数据包括最大值数据和最小值数据;
20.对所述卫星有云遥感数据中的剩余数据进行线性拉伸至0
‑
255,得到归一化数据。
21.进一步地,所述透射率图的计算公式如下:
[0022][0023]
其中,t表示透射率图,d表示暗通道矩阵,a
c
表示大气光。
[0024]
进一步地,所述根据所述透射率图和所述大气光确定第一还原数据,具体包括:
[0025]
根据所述透射率图和所述大气光,通过反解大气退化模型得到初始去云图像数据;
[0026]
对所述初始去云数据进行逆归一化处理,得到第一还原数据。
[0027]
进一步地,所述初始去云图像数据的计算公式如下:
[0028][0029]
其中,j
′
表示初始去云图像数据,t表示透射率图,a
c
表示大气光。
[0030]
本发明还提供了一种卫星影像非均匀薄云去除系统,包括:
[0031]
数据采集模块,用于采集卫星有云遥感数据;所述卫星有云遥感数据包括三个波段数据,分别为r波段数据、g波段数据以及b波段数据;
[0032]
筛选和归一化处理模块,用于对所述卫星有云遥感数据进行筛选和归一化处理,得到筛选数据和归一化数据;所述筛选数据包括极端像素数据和极端像素数据对应的位置信息数据;
[0033]
第一矩阵构建模块,用于根据所述归一化数据,选取三个波段数据的最小值数据构建第一矩阵;
[0034]
暗通道矩阵确定模块,用于对所述第一矩阵中预设大小的矩阵块进行最小滤波处理,得到暗通道矩阵;
[0035]
第二矩阵构建模块,用于选取所述暗通道矩阵中的最亮的n个像素点位置对应的归一化数据中的像素数据构建第二矩阵;
[0036]
大气光计算模块,用于对所述第二矩阵中的像素值求平均,得到大气光;
[0037]
透射率图计算模块,用于根据所述大气光和所述暗通道矩阵计算透射率图;
[0038]
第一还原数据确定模块,用于根据所述透射率图和所述大气光确定第一还原数据;
[0039]
第二还原数据确定模块,用于根据所述位置信息数据对所述极端像素数据进行还原,得到第二还原数据;
[0040]
去云后的遥感图像确定模块,用于基于所述第一还原数据和所述第二还原数据得到去云后的遥感图像。
[0041]
进一步地,所述筛选和归一化处理模块具体包括:
[0042]
筛选单元,用于筛选所述卫星有云遥感数据中像素值最高的2%像素数据和最低的2%像素数据,构成极端像素数据,并统计所述极端像素数据对应的位置信息数据;所述
第一极端像素数据包括最大值数据和最小值数据;
[0043]
线性拉伸单元,用于对所述卫星有云遥感数据中的剩余数据进行线性拉伸至0
‑
255,得到归一化数据。
[0044]
进一步地,所述透射率图的计算公式如下:
[0045][0046]
其中,t表示透射率图,d表示暗通道矩阵,a
c
表示大气光。
[0047]
进一步地,所述第一还原数据确定模块具体包括:
[0048]
初始去云图像数据确定单元,用于根据所述透射率图和所述大气光,通过反解大气退化模型得到初始去云图像数据;
[0049]
逆归一化处理单元,用于对所述初始去云数据进行逆归一化处理,得到第一还原数据。
[0050]
进一步地,所述初始去云图像数据的计算公式如下:
[0051][0052]
其中,j
′
表示初始去云图像数据,t表示透射率图,a
c
表示大气光。
[0053]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0054]
本发明通过数据预处理、计算暗通道、加权最小二乘滤波、大气光估算、透射率图估算、透射率图细化、无云图像恢复和后处理等步骤,能够对云层分布及密度不一的带有非均匀薄云的单幅遥感影像实现去云。
附图说明
[0055]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0056]
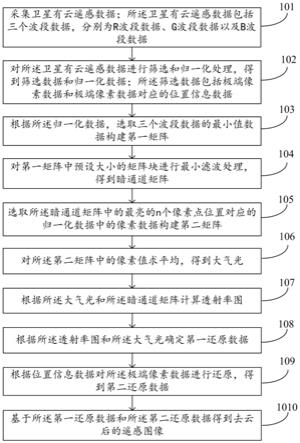
图1为本发明实施例卫星影像非均匀薄云去除方法的流程图。
具体实施方式
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
本发明的目的是提供一种卫星影像非均匀薄云去除方法及系统,以实现非均匀薄云遮盖下卫星影像细节信息的重建同时确保卫星影像色彩保真。
[0059]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0060]
如图1所示,本发明提供的一种卫星影像非均匀薄云去除方法,包括以下步骤:
[0061]
步骤101:采集卫星有云遥感数据;所述卫星有云遥感数据包括三个波段数据,分
别为r波段数据、g波段数据以及b波段数据。
[0062]
步骤102:对所述卫星有云遥感数据进行筛选和归一化处理,得到筛选数据和归一化数据;所述筛选数据包括极端像素数据和极端像素数据对应的位置信息数据。
[0063]
具体包括:
[0064]
筛选所述卫星有云遥感数据中像素值最高的2%像素数据和最低的2%像素数据,构成极端像素数据,并统计所述极端像素数据对应的位置信息数据;所述第一极端像素数据包括最大值数据和最小值数据;
[0065]
对所述卫星有云遥感数据中的剩余数据进行线性拉伸至0
‑
255,得到归一化数据。
[0066]
步骤103:根据所述归一化数据,选取三个波段数据的最小值数据构建第一矩阵。
[0067]
步骤104:对所述第一矩阵中预设大小的矩阵块进行最小滤波处理,得到暗通道矩阵。
[0068]
步骤105:选取所述暗通道矩阵中的最亮的n个像素点位置对应的归一化数据中的像素数据构建第二矩阵。
[0069]
步骤106:对所述第二矩阵中的像素值求平均,得到大气光。
[0070]
步骤107:根据所述大气光和所述暗通道矩阵计算透射率图。
[0071]
步骤108:根据所述透射率图和所述大气光确定第一还原数据。
[0072]
步骤109:根据所述位置信息数据对所述极端像素数据进行还原,得到第二还原数据。
[0073]
步骤1010:基于所述第一还原数据和所述第二还原数据得到去云后的遥感图像。
[0074]
具体实施例如下:
[0075]
步骤1:采集卫星有云遥感数据a;
[0076]
步骤2:将步骤1所采集遥感数据a的rgb三个波段数据存入矩阵i={i1,i2,i3},其中i1存储r波段数据,i2存储g波段数据,i3存储b波段数据。
[0077]
步骤3:数据归一化。
[0078]
步骤3.1:统计图像rgb数据i中r波段i1的像素值,将i1中数值最高的2%像素数据i
1max
存入数组i
max
,i
1max
在i1中对应的位置信息数据l
1max
存入数组l
max
。将i1中数值最低的2%像素数据i
1min
存入数组i
min
,i
1min
在i1中对应的位置数据l
1min
存入数组l
min
;
[0079]
步骤3.2:对i1中大于i
1min
且小于i
1max
的数据进行线性拉伸至0
‑
255,对i
1min
的数据设置为0,对i
1max
的数据设置为255,得到i1归一化后的矩阵i
o1
;
[0080]
步骤3.3:统计图像rgb数据i中g波段i2的像素值,将i2中数值最高的2%像素数据i
2max
存入数组i
max
,i
2max
在i2中对应的位置信息数据l
2max
存入数组l
max
。将i2中数值最低的2%像素数据i
2min
存入数组i
min
,i
2min
在i2中对应的位置数据l
2min
存入数组l
min
;
[0081]
步骤3.4:对i2中大于i
2min
且小于i
2max
的数据进行线性拉伸至0
‑
255,对i
2min
的数据设置为0,对i
2max
的数据设置为255,得到i2归一化后的矩阵i
o2
;
[0082]
步骤3.5:统计图像rgb数据i中b波段i3的像素值,将i3中数值最高的2%像素数据i
3max
存入数组i
max
,i
3max
在i3中对应的位置信息数据l
3max
存入数组l
max
。将i3中数值最低的2%像素数据i
3min
存入数组i
min
,i
3min
在i3中对应的位置数据l
3min
存入数组l
min
;
[0083]
步骤3.6:对i3中大于i
3min
且小于i
3max
的数据进行线性拉伸至0
‑
255,对i
3min
的数据设置为0,对i
3max
的数据设置为255,得到i3归一化后的矩阵i
o3
。
[0084]
最终得到归一化的像素数据i
o
={i
o1
,i
o2
,i
o3
}、存储的极端像素数据i
max
={i
1max
,i
2max
,i
3max
}和i
min
={i
1min
,i
2min
,i
3min
},以及极端数据的位置信息l
max
={l
1max
,l
2max
,l
3max
}和l
min
={l
1min
,l
2min
,l
3min
}。
[0085]
步骤4:依据步骤3得到的归一化数据i
o
,选取rgb三个波段的最小值数据存入矩阵i
omin
中,选取i
omin
内5*5大小的矩阵块ω进行最小滤波得到io的暗通道矩阵:
[0086]
步骤5:根据步骤4得到的图像数据暗通道数据d,构造矩阵d
max
,选取d中最亮的0.1%像素点位置对应于i
o
中的中数据存入d
max
中,并将矩阵d
max
中的像素值求平均,得到大气光a
c
。
[0087]
步骤6:利用步骤5中所述大气光a
c
以及步骤4中的暗通道d计算透射率图:
[0088]
步骤7:利用步骤6得到的透射图t和大气光a
c
,通过反解大气退化模型得到去云图像数据j’:
[0089]
步骤8:对步骤7所述去云图像数据j’进行逆归一化处理,还原对应大小的数据j={j1,j2,j3};
[0090]
步骤9:对应l
max
和l
min
中的位置信息将步骤3中的数据i
max
和i
min
进行还原;得到去云之后的遥感图像j。
[0091]
本发明通过数据预处理、计算暗通道、加权最小二乘滤波、大气光估算、透射率图估算、透射率图细化、无云图像恢复和后处理等步骤,能够对云层分布及密度不一的带有非均匀薄云的单幅遥感影像实现去云。
[0092]
本发明还提供了一种卫星影像非均匀薄云去除系统,包括:
[0093]
数据采集模块,用于采集卫星有云遥感数据;所述卫星有云遥感数据包括三个波段数据,分别为r波段数据、g波段数据以及b波段数据;
[0094]
筛选和归一化处理模块,用于对所述卫星有云遥感数据进行筛选和归一化处理,得到筛选数据和归一化数据;所述筛选数据包括极端像素数据和极端像素数据对应的位置信息数据;
[0095]
第一矩阵构建模块,用于根据所述归一化数据,选取三个波段数据的最小值数据构建第一矩阵;
[0096]
暗通道矩阵确定模块,用于对所述第一矩阵中预设大小的矩阵块进行最小滤波处理,得到暗通道矩阵;
[0097]
第二矩阵构建模块,用于选取所述暗通道矩阵中的最亮的n个像素点位置对应的归一化数据中的像素数据构建第二矩阵;
[0098]
大气光计算模块,用于对所述第二矩阵中的像素值求平均,得到大气光;
[0099]
透射率图计算模块,用于根据所述大气光和所述暗通道矩阵计算透射率图;
[0100]
第一还原数据确定模块,用于根据所述透射率图和所述大气光确定第一还原数据;
[0101]
第二还原数据确定模块,用于根据所述位置信息数据对所述极端像素数据进行还原,得到第二还原数据;
[0102]
去云后的遥感图像确定模块,用于基于所述第一还原数据和所述第二还原数据得到去云后的遥感图像。
[0103]
其中,所述筛选和归一化处理模块具体包括:
[0104]
筛选单元,用于筛选所述卫星有云遥感数据中像素值最高的2%像素数据和最低的2%像素数据,构成极端像素数据,并统计所述极端像素数据对应的位置信息数据;所述第一极端像素数据包括最大值数据和最小值数据;
[0105]
线性拉伸单元,用于对所述卫星有云遥感数据中的剩余数据进行线性拉伸至0
‑
255,得到归一化数据。
[0106]
其中,所述第一还原数据确定模块具体包括:
[0107]
初始去云图像数据确定单元,用于根据所述透射率图和所述大气光,通过反解大气退化模型得到初始去云图像数据;
[0108]
逆归一化处理单元,用于对所述初始去云数据进行逆归一化处理,得到第一还原数据。
[0109]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0110]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。