gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法和系统
技术领域
1.本发明属于卫星测高学、海洋测绘学等交叉技术领域,尤其涉及一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法和系统。
背景技术:
2.gnss
‑
r测高可作为传统高度计的辅助手段,为全球海洋中尺度和次中尺度过程,以及全球气候变化研究提供亟需的全球高覆盖海面高度观测。由于海面存在波浪,故实际海面是粗糙、偏斜和快速变化的,尤其对于gnss的信号的波长来说。信号在海面并不是发生镜面反射,这导致镜面反射点在反射功率波形上的位置存在偏差,从而对反射信号相对直射信号的延迟引入误差,这对高精度测高是不可忽略的。由于gnss
‑
r观测的原理和海面粗糙度的复杂多变,一直以来,对反射延迟海况误差的定量分析和修正是提高gnss
‑
r测高精度的技术难点和制约之一。在gnss
‑
r海面测高卫星任务中,这是高度精确反演所要解决的一项关键问题。
3.基于模型的gnss
‑
r镜面反射点的确切位置可获得精确的模型反射延迟,这对于反射延迟海况误差的量化和修正是不可或缺的,是提高gnss
‑
r测高精度的主要实现手段之一。目前镜面反射点定位的反射面模型相对于瞬时海面仍存在海面动力地形误差和垂线偏差误差,亟待修正。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法和系统,旨在通过对镜面反射点进行修正,以实现对gnss
‑
r海况误差的量化和修正,抵消因海面地形高程误差和垂线偏差坡度误差导致的gnss
‑
r测高反射面模型的定位精度低的问题,进而提高gnss
‑
r测高反射面模型的定位精度。
5.为了解决上述技术问题,本发明公开了一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法,包括:
6.确定初始镜面反射点;
7.采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点;
8.采用卯酉分量η和子午分量ζ,对一次修正后的镜面反射点进行二次修正定位,将一次修正后的镜面反射点定位在瞬时海面上,得到二次修正后的镜面反射点;
9.将二次修正后的镜面反射点作为gnss
‑
r测高反射面模型的镜面反射点,以提高gnss
‑
r测高反射面模型的定位精度。
10.在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,初始镜面反射点定位在参考椭球面上,初始镜面反射点的经度为l、纬度为b,初始镜面反射点的高程相对于参考椭球面为0。
11.在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点,包括:
12.确定镜面反射点的空间坐标表达式:
[0013][0014][0015][0016]
根据公式(1)~(3),得到如下公式(4):
[0017][0018]
基于公式(4),求入射角、出射角和地心角,并加权迭代,直至满足迭代截止条件,完成对初始镜面反射点的修正,得到一次修正后的镜面反射点;
[0019]
其中,h
g
表示镜面反射点与大地水准面之间的差距,h
t
表示海洋潮汐高程,h
mdt
表示海面平均动力地形高程;ρ
x
、ρ
y
、ρ
z
分别表示镜面反射点在x、y、z方向每次迭代的海面平均动力地形高程修正分量;λ
x
、λ
y
、λ
z
分别表示镜面反射点在x、y、z方向每次迭代的大地水准面和海洋潮汐高程修正分量之和;n表示一中间量,e表示wgs
‑
84椭球第一偏心率,a表示wgs
‑
84椭球长半径。
[0020]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点,还包括:
[0021]
基于修正精度和迭代次数的综合考量,设定如下迭代截止条件:
[0022]
入射角-出射角<10
‑8rad
[0023]
即,当入射角与出射角之差小于10
‑8rad时,停止加权迭代。
[0024]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,加权迭代停止后,x、y、z方向总的海面平均动力地形高程修正分量σ
x
、σ
y
、σ
z
分别如下:
[0025][0026]
其中,n表示停止加权迭代时,加权迭代的总次数。
[0027]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,海面平均动力地形mdt对初始镜面反射点的修正定位精度的提高量为采用海面平均动力地形mdt修正定位前后镜面反射点之间的空间距离d
mdt
:
[0028][0029]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,采用卯酉分量η和子午分量ζ,对一次修正后的镜面反射点进行二次修正定位,将一次修正后的镜面反射点定位在瞬时海面上,得到二次修正后的镜面反射点,包括:
[0030]
采用卯酉分量η对椭球法向(x1,y1,z1)进行卯酉方向上的修正;
[0031]
根据卯酉方向上的修正结果,采用子午分量ζ进行子午方向上的修正,以在空间坐标系内,将椭球法向(x1,y1,z1)修正至大地水准面法向(x2,y2,z2);
[0032]
根据大地水准面法向(x2,y2,z2),应用无近似法向投影修正法,对一次修正后的镜面反射点进行二次修正定位,即将一次修正后的镜面反射点修正至大地水准面法向的垂面,得到二次修正后的镜面反射点,以减小径向
‑
法向差异导致的定位误差。
[0033]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,采用卯酉分量η对椭球法向(x1,y1,z1)进行卯酉方向上的修正,包括:
[0034]
采用卯酉分量η对椭球法向(x1,y1,z1)进行卯酉方向上的修正,在xoy平面内求中间量x
′2和y
′2:
[0035]
当η>0且x1y1>0,或η<0且x1y1<0时,有:
[0036]
|x
′2|=|x1|cos(|η|)
‑
|y1|sin(|η|)
[0037]
|y
′2|=|x1|sin(|η|) |y1|cos(|η|)
[0038]
当η<0且x1y1>0,或η>0且x1y1<0时,有:
[0039]
|x
′2|=|y1|cos(|η|)
‑
|x1|sin(|η|)
[0040]
|y
′2|=|y1|sin(|η|) |x1|cos(|η|)。
[0041]
在上述gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法中,根据卯酉方向上的修正结果,采用子午分量ζ进行子午方向上的修正,以在空间坐标系内,将椭球法向(x1,y1,z1)修正至大地水准面法向(x2,y2,z2),包括:
[0042]
当ζ<0且z1<0,或ζ>0且z1>0时,有:
[0043]
|x2|=(r2/r1)|x
′2|
[0044]
|y2|=(r2/r1)|y
′2|
[0045]
|z2|=r cos(α |ζ|)
[0046]
其中,此时的中间量α、中间量r1、中间量r2分别为:
[0047]
α=arcsin[(x1,y1,z1)(0,0,1)/r]
[0048]
r1=r cos(α)
[0049]
r2=r cos(α |ζ|)=r sin(α)cos(|ζ|) r cos(α)sin(|ζ|)=|z1|cos(|ζ|) r1sin(|ζ|)
[0050]
当ζ>0且z1<0,或ζ<0且z1>0时,有:
[0051]
|x2|=(r2/r1)|x
′2|
[0052]
|y2|=(r2/r1)|y
′2|
[0053]
|z2|=r cos(|ζ| β)=r cos(|ζ|)cos(β)
‑
r sin(|ζ|)sin(β)
[0054]
其中,此时的中间量β、中间量r1、中间量r2分别为:
[0055]
β=π/2
‑
arcsin[(x1,y1,z1)(0,0,1)/r]
[0056]
r1=r sin(β)
[0057]
r2=r sin(β |ζ|)=r sin(β)cos(|ζ|) r cos(β)sin(|ζ|)=|z1|sin(|ζ|) r1cos(|ζ|)
[0058]
其中,r表示椭球法向的模。
[0059]
在上述实施例的基础上,本发明还公开了一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位系统,包括:
[0060]
确定模块,用于确定初始镜面反射点;
[0061]
一次修正模块,用于采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点;
[0062]
二次修正模块,用于采用卯酉分量η和子午分量ζ,对一次修正后的镜面反射点进行二次修正定位,将一次修正后的镜面反射点定位在瞬时海面上,得到二次修正后的镜面反射点;
[0063]
定位模块,用于将二次修正后的镜面反射点作为gnss
‑
r测高反射面模型的镜面反射点,以提高gnss
‑
r测高反射面模型的定位精度。
[0064]
本发明具有以下优点:
[0065]
如前所述,基于模型的gnss
‑
r镜面反射点的确切位置,可获得精确的模型反射延迟,这对于gnss
‑
r海况误差的量化和修正是不可或缺的,是提高gnss
‑
r测高精度的主要实现手段之一。目前镜面反射点定位的反射面模型相对于瞬时海面仍存在海面动力地形误差和垂线偏差误差,亟待修正。本发明就此开展了以下研究:(1)基于在中国海的船载gnss
‑
r观测,引入海面平均动力地形等多种地球物理参量,以修正反射面的高程误差。(2)基于高程误差的修正结果,引入垂线偏差,进行垂线偏差修正定位,以修正反射面的坡度误差,将最终修正后的镜面点定位在瞬时海面上。(3)对模型和定位结果进行了验证,对修正量与反射入射角的关系进行了分析,并对平均海面动力地形修正量的空间分布特征进行了讨论。研究结果表明,反射面建模和镜面点定位的结果准确,修正定位误差随反射入射角不同程度地增大。平均海面地形修正将定位精度提高了0.91m,垂线偏差修正将定位精度进一步提高了0.12m,基于两种修正定位的组合应用,定位精度综合提高了0.99m。中国海的平均海面动力地形修正量由北向南逐渐增大,局部海域由北向南逐渐减小,且在局部呈现一定随机性。天线间相对位置及其变化引入了不确定性,该影响可通过硬件集成减小。本发明构建的
新型瞬时海洋反射面模型及相应的镜面点定位方法可为中国海船载gnss
‑
r反射延迟海况偏差的量化、建模及修正提供精确的模型延迟,并可扩展至卫星的全球观测。
附图说明
[0066]
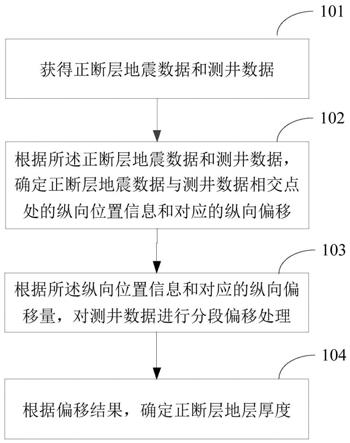
图1是本发明实施例中一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法的步骤流程图;
[0067]
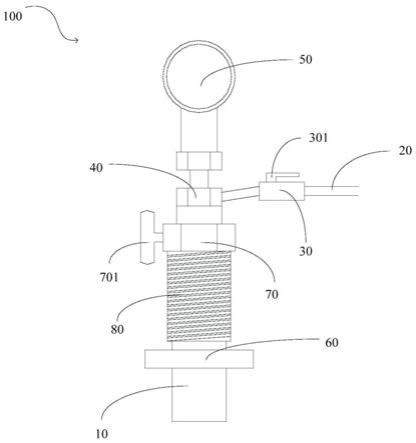
图2是本发明实施例中一种船载gnss
‑
r设备天线侧截面几何关系示意图;
[0068]
图3是本发明实施例中一种垂线偏差修正几何示意图;
[0069]
图4是本发明实施例中一种d
mdt
与对应的θ的关系示意图;
[0070]
图5是本发明实施例中一种反射面高程修正定位的几何关系示意图;
[0071]
图6是本发明实施例中一种d
mdt
与d
mdt
′
及二者的拟合示意图;其中,x轴为d
mdt
′
,y轴为d
mdt
;
[0072]
图7是本发明实施例中一种按θ升续排列的d
mdt
及mean(h
mdt
)/cosθ的示意图;
[0073]
图8是本发明实施例中一种按θ升续排列的δd
mdt
的示意图;
[0074]
图9是本发明实施例中一种按θ升续排列的|δd
mdt
|及其线性拟合的示意图;
[0075]
图10是本发明实施例中一种按θ升续排列的d
dov
及其线性拟合的示意图;
[0076]
图11是本发明实施例中一种按θ升续排列的d
mdt dov
及其线性拟合的示意图。
具体实施方式
[0077]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0078]
gnss
‑
r测高反射面模型的反射路径是:从gnss卫星发射机到由参考反射面定义的镜面反射点,再到gnss
‑
r卫星接收机相位中心。其中,参考反射面的高程和坡度决定了镜面反射点的位置,进而决定了gnss
‑
r测高反射面模型的反射路径,及基于反射路径确定的模型反射延迟。故,若要获得不含海况误差的模型反射延迟,则需要构建高程和坡度与镜面反射点时刻和位置的瞬时海面接近的理想光滑海面模型。对反射路径引入的误差比海况误差低一个量级以上的地球物理参量,均引入参考反射面的建模。在本发明中,在gnss
‑
r大地水准面和海洋潮汐面参考反射面模型的基础上,进一步引入了海面平均动力地形mdt和垂线偏差,以修正反射面的高程和坡度误差,构建瞬时海洋反射面模型,将镜面反射点定位于瞬时海面上。
[0079]
如图1,在本实施例中,该gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位方法,包括:
[0080]
步骤101,确定初始镜面反射点。
[0081]
在本实施例中,对海洋参考反射面的建模是在镜面反射点定位过程中实现。初始镜面反射点定位在参考椭球面上,初始镜面反射点的经度为l、纬度为b,初始镜面反射点的高程相对于参考椭球面为0。
[0082]
步骤102,海面平均动力地形mdt修正定位:采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点。
[0083]
在本实施例中,可以在大地坐标转换为空间坐标的过程中,引入初始镜面反射点
位置和时刻的地球物理参量高程,实现对初始镜面反射点的修正定位:
[0084]
首先,确定镜面反射点的空间坐标表达式:
[0085][0086][0087][0088]
然后,根据公式(1)~(3),可以得到如下公式(4):
[0089][0090]
最后,基于公式(4),求入射角、出射角和地心角,并加权迭代,直至满足迭代截止条件,完成对初始镜面反射点的修正,得到一次修正后的镜面反射点。
[0091]
其中,上述各字母的含义如下:h
g
表示镜面反射点与大地水准面之间的差距,h
t
表示海洋潮汐高程,h
mdt
表示海面平均动力地形高程;ρ
x
、ρ
y
、ρ
z
分别表示镜面反射点在x、y、z方向每次迭代的海面平均动力地形高程修正分量;λ
x
、λ
y
、λ
z
分别表示镜面反射点在x、y、z方向每次迭代的大地水准面和海洋潮汐高程修正分量之和;n表示一中间量,e表示wgs
‑
84椭球第一偏心率,a表示wgs
‑
84椭球长半径。
[0092]
优选的,基于修正精度和迭代次数的综合考量,可以设定如下迭代截止条件:
[0093]
入射角-出射角<10
‑8rad
[0094]
即,当入射角与出射角之差小于10
‑8rad时,停止加权迭代,一次修正定位结束。
[0095]
进一步的,加权迭代停止后,x、y、z方向总的海面平均动力地形高程修正分量σ
x
、σ
y
、σ
z
分别如下:
[0096][0097]
其中,n表示停止加权迭代时,加权迭代的总次数。
[0098]
此外,海面平均动力地形mdt对初始镜面反射点的修正定位精度的提高量为采用海面平均动力地形mdt修正定位前后镜面反射点之间的空间距离d
mdt
:
[0099][0100]
步骤103,垂线偏差修正定位:采用卯酉分量η和子午分量ζ,对一次修正后的镜面反射点进行二次修正定位,将一次修正后的镜面反射点定位在瞬时海面上,得到二次修正后的镜面反射点。
[0101]
在本实施例中,垂线偏差修正定位的本质就是对一次修正后的镜面反射点法向在在卯酉方向和子午方向上进行修正。首先,采用卯酉分量η对椭球法向(x1,y1,z1)进行卯酉方向上的修正;然后,根据卯酉方向上的修正结果,采用子午分量ζ进行子午方向上的修正,以在空间坐标系内,将椭球法向(x1,y1,z1)修正至大地水准面法向(x2,y2,z2);最后,根据大地水准面法向(x2,y2,z2),应用无近似法向投影修正法,对一次修正后的镜面反射点进行二次修正定位,即将一次修正后的镜面反射点修正至大地水准面法向的垂面,得到二次修正后的镜面反射点,以减小径向
‑
法向差异导致的定位误差。
[0102]
优选的,采用卯酉分量η进行卯酉方向上的修正的流程如下:
[0103]
当η>0且x1y1>0,或η<0且x1y1<0时,如图3a所示,则有:
[0104]
|x
′2|=|x1|cos(|η|)
‑
|y1|sin(|η|)
[0105]
|y
′2|=|x1|sin(|η|) |y1|cos(|η|)
[0106]
当η<0且x1y1>0,或η>0且x1y1<0时,如图3b所示,则有:
[0107]
|x
′2|=|y1|cos(|η|)
‑
|x1|sin(|η|)
[0108]
|y
′2|=|y1|sin(|η|) |x1|cos(|η|)
[0109]
优选的,采用子午分量ζ进行子午方向上的修正的流程如下:
[0110]
确定椭球法向的模r。
[0111]
当ζ<0且z1<0,或ζ>0且z1>0时,如图3c所示,则有:
[0112]
|x2|=(r2/r1)|x
′2|
[0113]
|y2|=(r2/r1)|y
′2|
[0114]
|z2|=r cos(α |ζ|)
[0115]
此时的中间量α、中间量r1、中间量r2分别为:
[0116]
α=arcsin[(x1,y1,z1)(0,0,1)/r]
[0117]
r1=r cos(α)
[0118]
r2=r cos(α |ζ|)=r sin(α)cos(|ζ|) r cos(α)sin(|ζ|)=|z1|cos(|ζ|) r1sin(|ζ|)
[0119]
当ζ>0且z1<0,或ζ<0且z1>0时,如图3d所示,则有:
[0120]
|x2|=(r2/r1)|x
′2|
[0121]
|y2|=(r2/r1)|y
′2|
[0122]
|z2|=r cos(|ζ| β)=r cos(|ζ|)cos(β)
‑
r sin(|ζ|)sin(β)
[0123]
其中,此时的中间量β、中间量r1、中间量r2分别为:
[0124]
β=π/2
‑
arcsin[(x1,y1,z1)(0,0,1)/r]
[0125]
r1=r sin(β)
[0126]
r2=r sin(β |ζ|)=r sin(β)cos(|ζ|) r cos(β)sin(|ζ|)=|z1|sin(|ζ|) r1cos(|ζ|)
[0127]
步骤104,将二次修正后的镜面反射点作为gnss
‑
r测高反射面模型的镜面反射点,以提高gnss
‑
r测高反射面模型的定位精度。
[0128]
在上述实施例的基础上,下面结合一个具体的实验过程进行说明。
[0129]
1、船载gnss
‑
r设备及数据
[0130]
搭载向阳红06号科考船,使用gnss
‑
r海面测高设备开展了为期3周的海面测高实验。航线穿越黄海、东海和南海。gps
‑
r/bds
‑
r接收机系统的硬件主要包括两个双圆偏振交叉偶极天线和一个bds/gps if原始数据记录器。如图2所示,天顶天线接收直接信号,下视天线接收海面反射的gps/bds信号。天线距水面的高度约12m,直射天线的中心线为竖直方向,反射天线安装在直射天线下方,斜向下指向海面,反射中心线与直射天线中心线夹角γ为150
°
,二者的相位中心沿下视天线指向方向的距离d为0.283m,实验随机选择了17000个采样点。
[0131]
镜面反射点的定位是基于gnss位置、gnss
‑
r天线的位置,以及反射面进行。将gnss
‑
r直接和反射天线的相位中心视作同一位置。该位置是由船载gnss导航天线的大地坐标结合导航天线与gnss
‑
r设备在船体坐标系中的相对位置计算。二者的相对位置是由全站仪在船体坐标系测得的二者坐标计算的。船头指向是采样时刻船的大地坐标指向船的下一个大地坐标的方向。gnss位置由星历文件获取。
[0132]
2、地球物理模型
[0133]
瞬时海洋反射面模型的构建是对地球椭球面引入一系列地球物理参量进行修正,包括由egm2008模型计算的大地水准面差距、由tpxo8模型计算的海洋潮汐高程、dtu15的海面平均动力地形修正高程误差,在此基础上使用ggmplus重力场垂线偏差修正坡度误差。
[0134]
2.1)egm2008
[0135]
egm2008模型阶次完全至2159,相当于模型的空间分辨率约为5
′×5′
,高度异常/大地水准面波动传播标准偏差为10.925cm。本发明使用插值到1
′×1′
的网格上的最高空间分辨率模型计算大地水准面高度,插值误差不超过
±
1mm。
[0136]
2.2)toxo8模型
[0137]
tpxo8模型对精度和空间分辨率进行了两方面的加强:1)tpxo8对卫星高度计数据进行了沿轨调和分析,在浅水区域加入了卫星和验潮站数据,并考虑非线性的1/4日分潮,以提高近海浅水区域的精度。2)tpxo8加入了高分辨率的区域同化模型,获得1/6
°
分辨率。这些区域主要包括封闭和半封闭的海洋以及大多数大陆架的沿岸区域。tpxo8模型还在可用的近海区域使用1’得测深数据,以提高精度和空间分辨率。,该模型主要分潮潮高在中国海的均方根偏差为cm级,这对于主要在近海进行的高分辨率船载实验有很大帮助。
[0138]
2.3)dtu15 mdt
[0139]
dtu15 mdt是由基于1993年至2015年的卫星数据获取的平均海面高度扣除egm2008的大地水准面起伏获得,精度为cm级,空间分辨率为1
′×1′
。
[0140]
2.4)ggmplus数据(垂线偏差)
[0141]
ggmplus模型由grace和goce卫星重力以及egm2008和短波地形重力的合成,空间分辨率为0.002度,~220m,其垂线偏差数据包括子午分量和卯酉分量,单位为弧秒。
[0142]
2.5)星历
[0143]
gnss轨道信息由全球导航卫星系统服务(international gnss service,igs)提供的gnss星历文件中获得。除特别说明外,本发明使用的位置信息是基于ecef wgs
‑
84坐标系。
[0144]
3、镜面反射点修正定位结果
[0145]
3.1)mdt修正
[0146]
mdt高程平均为0.66m,最大值为0.70m,最小值为0.58m。在空间坐标系,定位精度提高了0.91m。其中,在x、y、z方向分别平均提升
‑
0.36m、0.53m、0.18m,修正量模的平均值分别为0.46m、0.53m、0.39m。
[0147]
3.2)dov修正
[0148]
ggmplus垂线偏差数据对全球海洋并不是全部覆盖,共有4246个采样有垂线偏差数据,垂线偏差的卯酉分量和子午分量的平均值分别为
‑
0.0023
°
和0.0012
°
。在空间坐标系,定位精度提高了0.12m。其中,在x、y、z方向分别平均提升
‑
0.04m、
‑
0.03m、
‑
0.02m,修正量模的平均值分别为0.04m、0.03m、0.04m。
[0149]
3.3)组合修正
[0150]
组合应用mdt修正定位和dov修正定位,最终的定位结果相对于修正前的定位结果是定位精度的综合提升量。对于含有dov的采样点,在空间坐标系,定位精度综合提高了0.99m。其中,在x、y、z方向分别平均提升
‑
0.48m、0.47m、0.14m,修正量模的平均值分别为0.57m、0.49m、0.40m。
[0151]
4、模型验证
[0152]
图4为mdt定位修正量d
mdt
及对应的反射入射角θ。可以看到大多数测段均为θ由大变小,再变大的过程,这是gnss
‑
r设备从对一颗gnss卫星可视到不可视的通常过程,d
mdt
的变化与θ非常一致。
[0153]
为了进一步验证基于瞬时海洋反射面模型的修正定位结果,将修正量d
mdt
与模拟的定位修正量d
mdt
′
进行比较。图5为反射面高程修正定位几何关系,可知d
mdt
′
=h
mdt
/cosθ,θ为反射入射角,其范围为约15
°
至约70
°
,sp为修正前的镜面反射点,sp
′
为修正后的镜面反射点。
[0154]
计算了|δd
mdt
|=|d
mdt
′‑
d
mdt
|,其均值为1.09
×
10
‑4,标准偏差为2.29
×
10
‑4,d
mdt
′
与d
mdt
非常接近。d
mdt
和d
mdt
′
的相关系数为97.66%,具有很好的正相关性。图6为d
mdt
与d
mdt
′
的拟合直线,斜率为1.004
±
0.003,拟合直线的和方差为19.98,均方根误差为3.428
×
10
‑2,误差较小,并且相关性随d
mdt
或d
mdt
′
的增大没有明显降低。按θ升续排列d
mdt
及d
mdt
′
,二者的相关性为99.95%。由于二者非常相近,为了便于分辨二者的变化趋势,我们在图7中画出了d
mdt
(蓝色点)及mean(h
mdt
)/cosθ,(红色曲线)。可以看到d
mdt
与mean(h
mdt
)/cosθ的变化趋势非常一致,θ是d
mdt
的主要影响因子。少量采样的θ较大,导致d
mdt
也较大,这与相应θ下的mean(h
mdt
)/cosθ一致。上述结果验证了海面动力地形修正定位的准确性,定位精度较高。
[0155]
5、修正量与反射入射角的关系
[0156]
将δd
mdt
按θ升续排列,见图8。δd
mdt
以0为中心,具有正负对称分布的特征。在约第10000个采样之后,随θ的增大,δd
mdt
增大。这是由于随θ增大,反射路径加长,因此天线之间的相对位置及其变化引入的不确定性增加。约第10000个采样之后对称特征逐渐消失,这是
由于较大的θ引入了额外的差值增加。在约第15000个采样之后δd
mdt
依然存在对称性,可以认为这种对称分布特征存在于采样所覆盖的全部入射角范围内。对|δd
mdt
|按θ升续排列并进行线性拟合,见图9,可以看到|δd
mdt
|随θ增大的趋势。在θ的最小值和最大值附近的少量采样对应的偏差较大。
[0157]
将垂线偏差修正量d
dov
按θ升续排列(见图10),d
dov
随θ的增大具有一定的增大趋势,但并不像d
mdt
那样与θ的变化一致。大多数采样段都经历了θ由小变大,再由大变小的过程。对于单独一轨的采样,在入射面内,当θ增大时,θ增大的方向与入射面法向变化的方向不一定是一致的,当二者一致时,d
dov
会随θ增大,反之d
dov
会减小。因此,d
dov
随θ的变化具有一定随机性。综合修正量d
mdt dov
按θ升序排列见图11,d
mdt dov
与θ总体上趋势一致,但并不完全相符,如前文介绍,这种不一致性是d
dov
相对θ的随机性引入的。
[0158]
6、mdt定位修正量的空间分布特征
[0159]
h
mdt
和d
mdt
在采样所覆盖的中国海区域(17
°
n~35
°
n)整体均呈现由北向南逐渐增大的趋势,黄海最低,东海高于黄海,南海最高(见表1)。在黄海南部至东海北部(32
°
n~35
°
n)和南海北部(17
°
n~21
°
n)这两个主要的海域,h
mdt
和d
mdt
均呈现由北向南逐渐减小的趋势。二者在厦门附近有所增大,在南海北部20
°
n~21
°
n海域达到最大值。在采样的经纬度覆盖均较高的南海,h
mdt
和d
mdt
具有从西北向东南(远离西北海岸)逐渐减小的趋势。在中国海整体和局部海域,d
mdt
与h
mdt
的变化趋势一致。
[0160] 采样数mean h
mdt
mean d
mdt
黄海16320.620.84东海47550.650.89南海106160.670.94
[0161]
表1,沿向阳红06号航迹在中国海各海域的h
mdt
及d
mdt
的示意表
[0162]
可见,海面地形高程在中国海整体和局部海域的空间变化单调,且较为平缓。与海面地形高程不同,修正量在局部的空间变化呈现一定的随机性,这一特征在采样的经纬度覆盖均较高的南海北部(17
°
n~21
°
n)较为明显。修正量空间分布的这种随机性是由于其决定因素除了海面地形高程,还包括反射几何关系中的入射角(反射角)、发射机距镜面反射点距离、镜面反射点距下视天线距离。对于同一gnss卫星的连续采样序列,上述反射几何关系中的各种参量也是在持续变化的,这种变化会造成该序列的dmdt具有一定单调性。这些各自具有不同单调性的序列相交叉或连接,组成了沿航迹的测段,使得测段修正量整体的空间变化呈现了一定随机性,我们认为这种特征在卫星测段中同样存在。此外,上视和下视天线相位中心之间存在一定距离。二者的相对位置随入射面、入射角和船体姿态而变化,对模型反射几何引入的不确定性估计为分米级,这一误差会对修正量结果引入随机误差。
[0163]
综上所述,本发明基于在中国海的船载gnss
‑
r观测,引入海面平均动力地形等多种地球物理参量,修正反射面的高程误差;基于高程修正引入垂线偏差,提出垂线偏差修正定位法,修正反射面的坡度误差,将镜面点定位在瞬时海面上。如上实验验证,结果表明:反射面建模和镜面点定位的结果准确,修正定位误差随反射入射角不同程度地增大。平均海面地形修正将定位精度提高了0.91m,垂线偏差修正将定位精度进一步提高了0.12m,基于两种修正定位的组合应用,定位精度综合提高了0.99m。中国海的平均海面动力地形修正量由北向南逐渐增大,局部海域由北向南逐渐减小,且在局部呈现一定随机性。天线间相对位
置及其变化引入了不确定性,该影响可通过硬件集成减小。本发明构建的新型瞬时海洋反射面模型及相应的镜面点定位方法可为中国海船载gnss
‑
r反射延迟海况偏差的量化、建模及修正提供精确的模型延迟,并可扩展至卫星的全球观测,为不同海域有针对性地制定后处理策略和修正定位误差奠定基础。
[0164]
在上述实施例的基础上,本发明还公开了一种gnss
‑
r镜面反射点的瞬时海洋反射面模型修正定位系统,包括:确定模块,用于确定初始镜面反射点;一次修正模块,用于采用海面平均动力地形mdt对初始镜面反射点进行修正定位,得到一次修正后的镜面反射点;二次修正模块,用于采用卯酉分量η和子午分量ζ,对一次修正后的镜面反射点进行二次修正定位,将一次修正后的镜面反射点定位在瞬时海面上,得到二次修正后的镜面反射点;定位模块,用于将二次修正后的镜面反射点作为gnss
‑
r测高反射面模型的镜面反射点,以提高gnss
‑
r测高反射面模型的定位精度。
[0165]
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
[0166]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0167]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。