1.本发明涉及电动重卡技术领域,尤其涉及一种电动重卡电池充换电系统。
背景技术:
2.目前,在电动重卡电池充换电领域,电池箱采用可快速更换结构,可在专用换电站内完成更换。换电站配备有x和y方向行走的多维桁车和z向卷扬吊升系统、充电装置、多组电池箱及多组充电工位。在专用换电装置的作用下,将已放电的电池箱取下,放入充电工位上,将已经充电的电池箱,装到电动重卡上。优点是能够在短时间完成电池箱的更换,多个方向可调整行走量。但是存在以下缺点,吊升系统体积大,控制比较复杂,成本很高;占地面积大,施工量大,成本高。因此,有必要提供一种电动重卡电池充换电系统解决上述技术问题。
技术实现要素:
3.本发明提供一种电动重卡电池充换电系统,解决了电动重卡吊升系统体积大,控制比较复杂,成本很高;占地面积大,施工量大,成本高的问题。
4.为解决上述技术问题,本发明提供的电动重卡电池充换电系统包括:电池更换站,为环形外架,所述环形外架上固定连接两个电池放置电池仓,所述环形外架和所述电池放置电池仓上均固定连接有连接滑轨;
5.吊装装置,所述吊装装置固定于所述环形外架的顶部,所述吊装装置包括环形安装架和环链葫芦,所述环形安装架的一侧固定连接有导向滑轮,所述环链葫芦上固定连接有升降绳索,所述升降绳索的一端穿过所述导向滑轮且固定连接有升降顶板;
6.旋转台,所述旋转台固定于所述吊装装置的底部;
7.滑动装置,所述滑动装置包括固定于所述旋转台底部的旋转滑轨,所述旋转滑轨上活动连接有可以在所述旋转滑轨和所述连接滑轨上活动的轨道机器人;
8.定位装置,所述定位装置固定于所述轨道机器人的底部,所述定位装置包括壳体,所述壳体内壁的一侧固定连接有导向轴,所述导向轴的上滑动连接有两个滑动板,所述滑动板的一侧固定连接有两个定位卡板,所述壳体内壁的两侧均固定连接有电动伸缩杆,所述电动伸缩杆的一端和所述滑动板固定连接。
9.优选的,所述环形外架的底部的两侧分别设置有设备管理室和调度控制室。
10.优选的,所述环形安装架和所述环链葫芦均固定于所述环形外架的顶部,所述升降顶板位于所述环形外架的中心位置。
11.优选的,所述旋转台包括固定架,所述固定架内壁的顶部开设有控制槽,所述控制槽内壁的顶部转动连接有从动齿轮,所述从动齿轮的底部通过连杆固定连接有环形板,所述控制槽内壁的一侧固定连接有电机,所述电机的输出固定连接有主动齿轮。
12.优选的,所述固定架固定于所述升降顶板的底部,所述主动齿轮和所述从动齿轮相啮合。
13.优选的,所述旋转滑轨固定于所述环形板的底部,并且旋转滑轨和所述连接滑轨相适配。
14.优选的,所述壳体固定于轨道机器人的底部,所述导向轴的两端分别和所述壳体内壁的两侧固定连接。
15.优选的,所述壳体的底部开设有用于所述滑动板穿过所述壳体的滑动槽,所述滑动板上且位于所述滑动槽的上方设置有支撑滑板。
16.优选的,所述电池放置电池仓上设置有电池,所述电池的顶部固定连接有安装卡架,所述安装卡架上开设有两个定位卡槽。
17.优选的,所述定位卡槽用于所述定位卡板穿过带动所述安装卡架和所述电池升降。
18.与相关技术相比较,本发明提供的电动重卡电池充换电系统具有如下有益效果:
19.本发明提供一种电动重卡电池充换电系统,通过电池更换站、吊装装置、旋转台、滑动装置和定位装置的互相协作配合使用,可以在将电动重卡停到设备管理室和调度控制室之间的停车区域时,可以自动完成对电动重卡的电池的更换,保证电动重卡在远距离运输时有足够的电量,无需花费长时间等待电池的充电,提升使用电动重卡时对物流货物运输的速度,吊装装置体积小,控制简洁,成本低;占地面积小,施工量小,成本高。
附图说明
20.图1为本发明提供的电动重卡电池充换电系统一种较佳实施例的结构示意图;
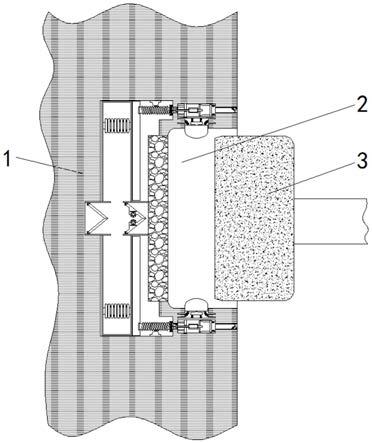
21.图2为图1所示环形外架正视部分的截面图;
22.图3为图2所示旋转台部分的结构示意图;
23.图4为图3所示抓取装置抓取电池过程中的状态示意图;
24.图5为4所示电池的侧视图。
25.图中标号:
26.1、电池更换站,11、环形外架,12、电池放置电池仓,13、连接滑轨,14、设备管理室,15、调度控制室;
27.2、吊装装置,21、环形安装架,22、环链葫芦,23、导向滑轮,24、升降绳索,25、升降顶板;
28.3、旋转台,31、固定架,32、控制槽,33、从动齿轮,34、环形板,35、电机,36、主动齿轮;
29.4、滑动装置,41、旋转滑轨,42、轨道机器人;
30.5、定位装置,51、壳体,52、导向轴,53、滑动板,54、定位卡板,55、电动伸缩杆;
31.6、滑动槽,7、支撑滑板,8、电池,9、安装卡架,10、定位卡槽。
具体实施方式
32.下面结合附图和实施方式对本发明作进一步说明。
33.请结合参阅图1、图2、图3、图4和图5,其中,图1为本发明提供的电动重卡电池充换电系统一种较佳实施例的结构示意图;图2为图1所示环形外架正视部分的截面图;图3为图2所示旋转台部分的结构示意图;图4为图3所示抓取装置抓取电池过程中的状态示意图;图
5为4所示电池的侧视图。电动重卡电池充换电系统包括:电池更换站1,为环形外架11,所述环形外架11上固定连接两个电池放置电池仓12,所述环形外架11和所述电池放置电池仓12上均固定连接有连接滑轨13;
34.吊装装置2,所述吊装装置2固定于所述环形外架11的顶部,所述吊装装置2包括环形安装架21和环链葫芦22,所述环形安装架21的一侧固定连接有导向滑轮23,所述环链葫芦22上固定连接有升降绳索24,所述升降绳索24的一端穿过所述导向滑轮23且固定连接有升降顶板25;
35.旋转台3,所述旋转台3固定于所述吊装装置2的底部;
36.滑动装置4,所述滑动装置4包括固定于所述旋转台3底部的旋转滑轨41,所述旋转滑轨41上活动连接有可以在所述旋转滑轨41和所述连接滑轨13上活动的轨道机器人42;
37.定位装置5,所述定位装置5固定于所述轨道机器人42的底部,所述定位装置5包括壳体51,所述壳体51内壁的一侧固定连接有导向轴52,所述导向轴52的上滑动连接有两个滑动板53,所述滑动板53的一侧固定连接有两个定位卡板54,所述壳体51内壁的两侧均固定连接有电动伸缩杆55,所述电动伸缩杆55的一端和所述滑动板53固定连接。
38.电池放置电池仓12有两个,可以对不同的电池进行分层放置,而在电池放置电池仓12上还有充电设备对放到电池放置电池仓12上的电池8进行充电,整个换电系统中的所有电子设备均通过plc电路进行自动控制,也可以通过调度控制室内部的开关进行操作,当需要对电动重卡进行电池更换时,将电动重卡停到设备管理室14和调度控制室15之间的停车区域,使得电动重卡的电池位于电池更换站1的中央位置。
39.所述环形外架11的底部的两侧分别设置有设备管理室14和调度控制室15。
40.调度控制室15和停车区之间有钢化玻璃,可以直接观看到电动重卡。
41.所述环形安装架21和所述环链葫芦22均固定于所述环形外架11的顶部,所述升降顶板25位于所述环形外架11的中心位置。
42.通过环链葫芦22可以对升降绳索24进行收卷和释放,环链葫芦22有两个,转动速度一致,可以同时对升降绳索24进行收卷和释放,保证升降顶板25的水平升降。
43.所述旋转台3包括固定架31,所述固定架31内壁的顶部开设有控制槽32,所述控制槽32内壁的顶部转动连接有从动齿轮33,所述从动齿轮33的底部通过连杆固定连接有环形板34,所述控制槽32内壁的一侧固定连接有电机35,所述电机35的输出固定连接有主动齿轮36。
44.环形板34可以在固定架31的下方转动。
45.所述固定架31固定于所述升降顶板25的底部,所述主动齿轮36和所述从动齿轮33相啮合。
46.因为主动齿轮36和从动齿轮33啮合,所以当主动齿轮36转动时,会带动从动齿轮33同步进行转动。
47.所述旋转滑轨41固定于所述环形板34的底部,并且旋转滑轨41和所述连接滑轨13相适配。
48.当旋转滑轨41随着环形板34旋转时,可以使得旋转滑轨41的两端贴合到连接滑轨13上,使得轨道机器人42可以带动可以通过旋转滑轨41向连接滑轨13上滑动。
49.所述壳体51固定于轨道机器人42的底部,所述导向轴52的两端分别和所述壳体51
内壁的两侧固定连接。
50.轨道机器人42可以在旋转滑轨41和连接滑轨13上滑动,导向轴52穿过两个滑动板53,使得滑动板53只能沿着导向轴52的方向水平滑动。
51.所述壳体51的底部开设有用于所述滑动板53穿过所述壳体51的滑动槽6,所述滑动板53上且位于所述滑动槽6的上方设置有支撑滑板7。
52.通过滑动槽6方便滑动板53的滑动,支撑滑板7的大小超过滑动槽6的开口大小,使得通过支撑滑板7在壳体51内部的滑动可以为滑动板53提供辅助支撑。
53.所述电池放置电池仓12上设置有电池8,所述电池8的顶部固定连接有安装卡架9,所述安装卡架9上开设有两个定位卡槽10。
54.所述定位卡槽10用于所述定位卡板54穿过带动所述安装卡架9和所述电池8升降。
55.本发明提供的电动重卡电池充换电系统的工作原理如下:
56.将需要更换电池8的电动重卡停到设备管理室14和调度控制室15之间时,可以对电动重卡上的电池进行更换;
57.s1、通过环链葫芦22对升降绳索24进行释放,此时升降顶板25在重力的作用下下降,并且带动位于升降顶板25下方的旋转台3、滑动装置4和定位装置5共同下移;
58.s2、当定位卡板54下降到位于电动重卡上的电池8的上方时,两个滑动板53位于两个安装卡架9之间,然后电动伸缩杆55收缩,带动两个滑动板53向相互远离的方向移动,滑动板53带动定位卡板54共同移动,使得定位卡板54穿过两个安装卡架9上的定位卡槽10;
59.s3、环链葫芦22对升降绳索24进行收卷,升降绳索24带动升降顶板25向上移动,升降顶板25带动下方旋转台3、滑动装置4和定位装置5共同向上移动,定位卡板54会带动安装卡架9向上移动,安装卡架9带动电池8向上移动;
60.s4、当旋转滑轨41转动至连接滑轨13的高度时,启动电机35,电机35带动主动齿轮36转动,主动齿轮36带动从动齿轮33转动,从动齿轮33带动环形板34转动,环形板34带动旋转滑轨41和轨道机器人42共同转动;
61.s5、当旋转滑轨41对准到所需放置电池对应区域的连接滑轨13所在位置时,轨道机器人42带动定位装置5和电池8共同向连接滑轨13的方向移动,使得电池8移动到电池放置电池仓12的上方;
62.s6、然后环链葫芦22释放升降绳索24,使得电池8下降到电池放置电池仓12上,然后电动伸缩杆55伸展使得两个滑动板53向相互靠近的方向移动,使得滑动板53带动定位卡板54脱离安装卡架9,此时通过环链葫芦22收卷升降绳索24带动定位装置5上移,再通过轨道机器人42带动定位装置5移动到旋转滑轨41上方;
63.s7、电机35再次带动环形板34、旋转滑轨41和轨道机器人42转动,使得旋转滑轨41对准另一个已经完成充电的电池8所在区域,使得轨道机器人42带动定位装置5滑动到该电池8的上方;
64.s8、环链葫芦22释放升降绳索24,使得定位装置5下降,同理于步骤s2将定位卡板54穿过安装卡架9上的定位卡槽10,再环链葫芦22收卷升降绳锁24带动定位装置5和电池8上移,再同理于步骤s6,使得轨道机器人42带动定位装置5和新的电池8移动到旋转滑轨41上,再同理于步骤s7,使得通过轨道机器人42带动电池8转动到和电动重卡电池安放区域对准的方向;
65.s9、环链葫芦22释放升降绳索24,使得旋转台3、滑动装置4和定位装置5下降,使得定位装置5带动电池8下降到电动重卡上,再同理于步骤s6,电动伸缩杆55伸展使得两个滑动板53向相互靠近的方向移动,使得滑动板53带动定位卡板54脱离安装卡架9;
66.s10、再通过环链葫芦22收卷升降绳索24,升降顶板带动旋转台3、滑动装置4和定位装置5共同向上移动,使得定位装置5和电池8分离,完成对电池8的更换。
67.与相关技术相比较,本发明提供的电动重卡电池充换电系统具有如下有益效果:
68.通过电池更换站1、吊装装置2、旋转台3、滑动装置4和定位装置5的互相协作配合使用,可以在将电动重卡停到设备管理室14和调度控制室15之间的停车区域时,可以自动完成对电动重卡的电池8的更换,保证电动重卡8在远距离运输时有足够的电量,无需花费长时间等待电池8的充电,提升使用电动重卡时对物流货物运输的速度,吊装装置体积小,控制简洁,成本低;占地面积小,施工量小,成本高。
69.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。