技术特征:
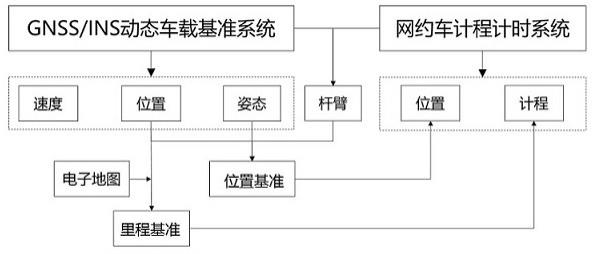
1.网约车计程检测方法,其特征在于:包括以下步骤:基于卫星导航系统gnss基准接收机差分定位与惯性导航系统ins进行组合定位,解算出真实环境下车辆载体的高精度离散点定位结果;利用所述高精度离散点定位结果,结合车道电子地图,进行车辆行驶轨迹的里程恢复,得到基准里程;将所述基准里程与网约车终端计程结果进行对比,得到网约车计程误差。2.根据权利要求1所述的网约车计程检测方法,其特征在于:所述高精度离散点定位结果的解算方法如下:首先,利用所述惯性导航系统ins的运动模型方程,以东北天坐标系为导航坐标n系建立ins位置、速度、姿态误差更新方程:;式中,上标
·
表示微分量,上标和下标中的i、e和b分别表示惯性系、地心地固坐标系和载体系,n表示导航系;、、分别表示位置、速度、姿态误差向量;表示从惯性坐标系到导航坐标系的刚体旋转矩阵,表示比力向量,表示在导航系下的重力误差向量,表示从e系到n系的旋转向量,表示从i系向e系的旋转向量,表示从b系到n系的旋转矩阵;表示加计在载体坐标系下的偏置,表示陀螺仪在载体坐标系下的偏置;然后,利用松耦合模型和卡尔曼滤波将gnss差分定位结果与ins进行组合定位,包含状态方程和观测方程两部分,所述状态方程为:;表示当前时刻状态参数,表示上一时刻状态参数,f表示两个时刻的状态转移矩阵;表示系统噪声矩阵;g表示噪声分配矩阵,包含了状态向量相关的方差;松耦合系统观测方程中输入量z为位置测量值和速度观测值,方程式为:z=;其中,表示惯导解算出的位置,表示卫星定位的位置,表示惯导解算出的速度,表示卫星定位计算速度;最后,利用式(2)和式(3)进行卡尔曼滤波解算,即可得到车辆载体的高精度离散点定位结果。3.根据权利要求1所述的网约车计程检测方法,其特征在于:所述车辆行驶轨迹的里程
恢复方法如下:采用直线连接计算出轨迹中相邻两点之间的距离,并对局部线段的距离求和得到里程l
p
:l
p
=
ꢀꢀ
(4);其中,i表示第i个定位点,m表示定位点数量,分别表示第i 1和第i个点的空间三维坐标。4.根据权利要求3所述的网约车计程检测方法,其特征在于:当所述高精度离散点定位结果存在误差时,还需采用结合车道电子地图方式,获得局部路段的起点和终点,随后依据与式(4)相同的计算方式获得局部受限路段的里程l
m
,最终,基准里程l计算为:l= l
p
l
m
(5)。5.根据权利要求4所述的网约车计程检测方法,其特征在于:所述局部路段的起点和终点的获得方法如下:由方差满足精度的最后一个点和受限区域恢复后的第一个点投影至电子地图上的垂直点获得。6.根据权利要求4所述的网约车计程检测方法,其特征在于:将预设的网约车终端计程结果n与式(5)中获得的基准里程l进行对比,即获得网约车计程误差:。7.网约车计程检测系统,其特征在于,包括定位结果计算模块,用于基于卫星导航系统gnss基准接收机差分定位与惯性导航系统ins进行组合定位,解算出真实环境下车辆载体的高精度离散点定位结果;基准里程计算模块,利用所述高精度离散点定位结果,结合车道电子地图,进行车辆行驶轨迹的里程恢复,得到基准里程;计程误差计算模块,用于将所述基准里程与网约车终端计程结果进行对比,得到网约车计程误差。8.根据权利要求7所述的网约车计程检测系统,其特征在于:所述高精度离散点定位结果的解算方法如下:首先,利用所述惯性导航系统ins的运动模型方程,以东北天坐标系为导航坐标n系建立ins位置、速度、姿态误差更新方程:;式中,上标
·
表示微分量,上标和下标中的i、e和b分别表示惯性系、地心地固坐标系和载体系,n表示导航系;、、分别表示位置、速度、姿态误差向量;表示从惯性坐标系到导航坐标系的刚体旋转矩阵,表示比力向量,表示在导航系下的重力误差
向量,表示从e系到n系的旋转向量,表示从i系向e系的旋转向量,表示从b系到n系的旋转矩阵;表示加计在载体坐标系下的偏置,表示陀螺仪在载体坐标系下的偏置;然后,利用松耦合模型和卡尔曼滤波将gnss差分定位结果与ins进行组合定位,包含状态方程和观测方程两部分,所述状态方程为:;表示当前时刻状态参数,表示上一时刻状态参数,f表示两个时刻的状态转移矩阵;表示系统噪声矩阵;g表示噪声分配矩阵,包含了状态向量相关的方差;松耦合系统观测方程中输入量z为位置测量值和速度观测值,方程式为:z=;其中,表示惯导解算出的位置,表示卫星定位的位置,表示惯导解算出的速度,表示卫星定位计算速度;最后,利用式(2)和式(3)进行卡尔曼滤波解算,即可得到车辆载体的高精度离散点定位结果;所述车辆行驶轨迹的里程恢复方法如下:采用直线连接计算出两点之间的距离,并对局部线段的距离求和得到里程l
p
:l
p
=
ꢀꢀ
(4);其中,i表示第i个定位点,m表示定位点数量,分别表示第i 1和第i个点的空间三维坐标;当所述高精度离散点定位结果存在误差时,还需采用结合车道电子地图的方式,获得局部路段的起点和终点,随后依据与式(4)相同的计算方式获得局部受限路段的里程l
m
,最终,基准里程l计算为:l= l
p
l
m
(5);将预设的网约车终端计程结果n与式(5)中获得的基准里程l进行对比,即获得网约车计程误差:。9.网约车计程检测装置,其特征在于,包括存储器,用于存储非暂时性计算机可读指令;以及处理器,用于运行所述计算机可读指令,使得所述计算机可读指令被所述处理器执行时实现根据权利要求1到6中任意一项所述的网约车计程检测方法。10.一种计算机可读存储介质,用于存储非暂时性计算机可读指令,当所述非暂时性计
算机可读指令由计算机执行时,使得所述计算机执行权利要求1到6中任意一项所述的网约车计程检测方法。
技术总结
本发明公开了网约车计程检测方法、系统、装置及计算机可读存储介质,方法包括:基于卫星导航系统GNSS基准接收机差分定位与惯性导航系统INS进行组合定位,解算出真实环境下车辆载体的高精度离散点定位结果;利用所述高精度离散点定位结果,结合车道电子地图,进行车辆行驶轨迹的里程恢复,得到基准里程;将所述基准里程与网约车终端计程结果进行对比,得到网约车计程误差。本发明能够为网约车计程提供准确的比较基准,从而实现真实动态路测环境下的计程检测;通过导入组合定位结果文件和输入网约车端计程结果,可直接计算出基准里程,从而获得网约车端的计程误差;本发明不仅能保证定位的精确性和连续性,而且提高了计程效率。而且提高了计程效率。而且提高了计程效率。
技术研发人员:张杰 曹相 陈倩倩 徐磊 高旺 潘树国 刘宏 黄雪莲
受保护的技术使用者:东南大学
技术研发日:2021.10.26
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。