技术特征:
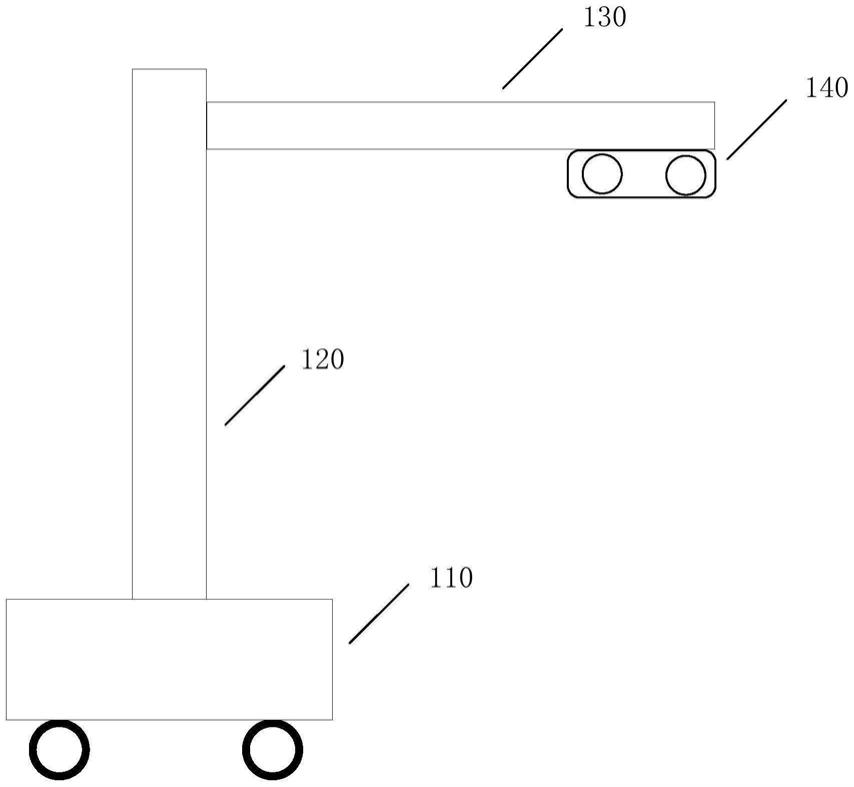
1.一种扫描设备,其特征在于,所述扫描设备包括可移动底盘(110)、支架(120)、水平杆(130)、相机(140);所述支架(120)固定于所述可移动底盘(110);所述水平杆(130)的一端安装在所述支架(120);所述相机(140)连接在所示水平杆(130)的另一端,并且所述水平杆(130)包括固定组件,所述固定组件用于限制所述相机(140)的方向角的变化;所述可移动底盘(110)用于带动所述相机(140)。2.根据权利要求1所述的扫描设备,其特征在于,所述支架(120)设置有垂直可伸缩结构(121),并且所述垂直可伸缩结构(121)可以在垂直方向伸缩,以调整所述水平杆(130)与所述可移动底盘的(110)上表面之间的距离;所述垂直可伸缩结构(121)包括垂直阻尼组件,所述垂直阻尼组件用于限制所述垂直可伸缩结构(121)伸缩。3.根据权利要求1所述的扫描设备,其特征在于,所述水平杆(130)设置有水平伸缩结构(131),并且所述水平伸缩结构(131)可以在水平方向伸缩,以调整所述相机(140)与所述支架(120)之间的距离;并且所述水平可伸缩结构(131)包括水平阻尼组件,所述水平阻尼组件用于限制所述水平可伸缩结构(131)伸缩。4.根据权利要求1所述的扫描设备,其特征在于,所述可移动底盘(110)包括转盘(112),所述支架(120)固定于所述转盘(112),所述转盘(112)用于带动所述支架(120)以垂直方向为轴进行旋转。5.根据权利要求1所述的扫描设备,其特征在于,所述可移动底盘(110),具体用于带动所述相机(140)沿预设轨迹以预设视角拍摄指定场景。6.一种相机的位姿确定方法,其特征在于,所述相机为如权利要求1-5任一所述的扫描设备中的相机,所述方法包括:获取所述相机在采集到目标图像帧之前的多个历史时间节点所处的多个位姿;按照所述扫描设备中所述相机的预设轨迹,拟合所述多个位姿,得到所述多个位姿所满足的约束条件;以所述相机采集到所述目标图像帧时所处的位姿满足所述约束条件为先验条件,按照预设位姿确定算法,确定所述相机采集到所述目标图像帧时所处的位姿。7.根据权利要求6所述的方法,其特征在于,所述按照所述扫描设备中所述相机的预设轨迹,拟合所述多个位姿,得到约束条件,包括:对所述多个位姿中的位置进行平面拟合,得到拟合平面的平面方程,作为约束条件。8.根据权利要求6所述的方法,其特征在于,所述按照所述扫描设备中所述相机的预设轨迹,拟合所述多个位姿,得到约束条件,包括:计算所述多个位姿所表示的朝向角的均值,将所述均值的表达式作为约束条件。9.根据权利要求6所述的方法,其特征在于,在所述以所述相机采集到所述目标图像帧时所处的位姿满足所述约束条件为先验条件,按照预设位姿确定算法,确定所述相机采集到所述目标图像帧时所处的位姿之后,所述方法还包括:基于所述相机采集到所述目标图像帧时所处的位姿,对所述扫描设备拍摄的场景进行
三维重建,得到所述场景的三维模型。10.一种相机的位姿确定装置,其特征在于,所述相机为如权利要求1-5任一所述的扫描设备中的相机,所述装置包括:历史位姿确定模块,用于获取所述相机在采集到目标图像帧之前的多个历史时间节点所处的多个位姿;轨迹拟合模块,用于按照所述扫描设备中所述相机的预设轨迹,拟合所述多个位姿,得到所述多个位姿所满足的约束条件;位姿求解模块,用于以所述相机采集到所述目标图像帧时所处的位置满足所述约束条件为先验条件,按照预设位姿确定算法,确定所述相机采集到所述目标图像帧时所处的位姿;处理器,用于运行可执行代码以通过所述历史位姿确定模块、所述轨迹拟合模块以及所述位姿求解模块实现如权利要求6-9任一所述的方法。
技术总结
本申请实施例提供了一种扫描设备、相机的位姿确定方法、装置及电子设备。其中,所述扫描设备包括可移动底盘、支架、水平杆、相机;所述支架固定于所述可移动底盘;所述水平杆的一端安装在所述支架;所述相机连接在所示水平杆的另一端,并且所述水平杆包括固定组件,所述固定组件用于限制所述相机的方向角的变化;所述可移动底盘用于带动所述相机。可以实现减少扫描现实场景时产生的冗余数据,以实现大规模场景的三维重建。景的三维重建。景的三维重建。
技术研发人员:浦世亮 李泽学 李杰 毛慧
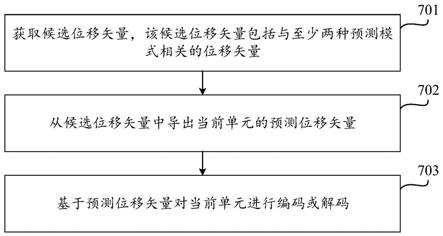
受保护的技术使用者:杭州海康威视数字技术股份有限公司
技术研发日:2020.05.22
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。