技术特征:
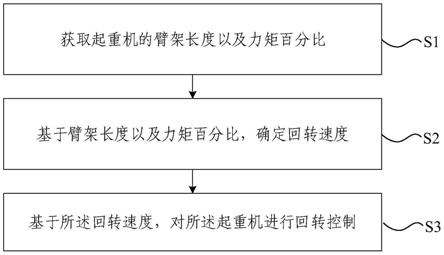
1.一种起重机回转控制方法,其特征在于,包括:获取起重机的臂架长度以及力矩百分比;基于所述臂架长度以及所述力矩百分比,确定回转速度;基于所述回转速度,对所述起重机进行回转控制。2.根据权利要求1所述的起重机回转控制方法,其特征在于,所述基于所述臂架长度以及所述力矩百分比,确定回转速度,具体包括:基于所述臂架长度以及所述力矩百分比,确定所述起重机的回转泵比例阀的初始电流值;控制所述起重机的回转泵比例阀的实时电流值从所述初始电流值开始按增加、保持不变、减少的顺序进行变化,并通过所述实时电流值表征所述回转速度。3.根据权利要求2所述的起重机回转控制方法,其特征在于,所述控制所述起重机的回转泵比例阀的实时电流值从所述初始电流值开始按增加、保持不变、减少的顺序进行变化,具体包括:控制所述实时电流值从所述初始电流值开始以预设速度进行增加,直至所述实时电流值达到预设电流值,并控制所述实时电流值保持不变;若所述起重机的实时回转信息以及目标回转信息之间的实时差异信息中的实时差异值小于等于第一预设差异值,则控制所述实时电流值从所述预设电流值开始分段进行减少,直至所述实时差异值小于等于第二预设差异值,控制所述实时电流值置零。4.根据权利要求2所述的起重机回转控制方法,其特征在于,所述基于所述臂架长度以及所述力矩百分比,确定所述起重机的回转泵比例阀的初始电流值,具体包括:若所述臂架长度小于等于预设长度,且所述力矩百分比小于等于预设比值,则确定所述初始电流值为预设初始值;若所述臂架长度小于等于预设长度,且所述力矩百分比大于所述预设比值,则确定所述初始电流值为所述预设初始值的第一倍数,所述第一倍数基于所述力矩百分比确定;若所述臂架长度大于所述预设长度,且所述力矩百分比小于等于所述预设比值,则确定所述初始电流值为所述预设初始值的第二倍数,所述第二倍数基于所述臂架长度确定;若所述臂架长度大于所述预设长度,且所述力矩百分比大于所述预设比值,则确定所述初始电流值为所述预设初始值的第一倍数与所述预设初始值的第二倍数中的最小值。5.根据权利要求1
‑
4中任一项所述的起重机回转控制方法,其特征在于,还包括:获取所述起重机的初始回转信息以及目标回转信息;基于所述初始回转信息与所述目标回转信息之间的初始差异信息,确定回转方向;相应地,所述基于所述回转速度,对所述起重机进行回转控制,具体包括:基于所述回转方向以及所述回转速度,对所述起重机进行回转控制,以使所述起重机的实时回转信息由所述初始回转信息调整至所述目标回转信息。6.根据权利要求5所述的起重机回转控制方法,其特征在于,所述初始差异信息还包括所述初始回转信息与所述目标回转信息之间的大小关系;相应地,所述基于所述初始回转信息与所述目标回转信息之间的初始差异信息,确定回转方向,具体包括:若所述大小关系为所述初始回转信息小于所述目标回转信息,且所述初始差异值小于
等于半周信息,则确定所述回转方向为俯视方向的顺时针;若所述大小关系为所述初始回转信息小于所述目标回转信息,且所述初始差异值大于半周信息,则确定所述回转方向为俯视方向的逆时针;若所述大小关系为所述初始回转信息大于所述目标回转信息,且所述初始差异值小于等于半周信息,则确定所述回转方向为俯视方向的逆时针;若所述大小关系为所述初始回转信息大于所述目标回转信息,且所述初始差异值大于半周信息,则确定所述回转方向为俯视方向的顺时针。7.根据权利要求5所述的起重机回转控制方法,其特征在于,所述实时回转信息由所述初始回转信息调整至所述目标回转信息的过程中,所述方法还包括:接收第一用户输入,并响应于所述第一用户输入,记录所述第一用户输入对应的第一指定回转信息;相应地,所述基于所述回转方向以及所述回转速度,对所述起重机进行回转控制,以使所述起重机的实时回转信息由所述初始回转信息调整至所述目标回转信息,之后还包括:基于所述第一指定回转信息与所述目标回转信息之间的第一指定差异信息,控制所述起重机进行回转动作,以使所述实时回转信息由所述目标回转信息调整至所述第一指定回转信息。8.根据权利要求5所述的起重机回转控制方法,其特征在于,所述基于所述回转方向以及所述回转速度,对所述起重机进行回转控制,以使所述起重机的实时回转信息由所述初始回转信息调整至所述目标回转信息,之后还包括:接收起重机操纵杆控制指令,并基于所述起重机操纵杆控制指令,控制所述起重机进行回转动作,以使所述实时回转信息由所述目标回转信息调整至用户理想回转信息。9.根据权利要求8所述的起重机回转控制方法,其特征在于,所述实时回转信息由所述目标回转信息调整至用户理想回转信息的过程中,所述方法还包括:接收第二用户输入,并响应于所述第二用户输入,记录所述第二用户输入对应的第二指定回转信息;相应地,所述基于所述起重机操纵杆控制指令,控制所述起重机进行回转动作,以使所述实时回转信息由所述目标回转信息调整至用户理想回转信息,之后还包括:基于所述第二指定回转信息与所述用户理想回转信息之间的第二指定差异信息,控制所述起重机进行回转动作,以使所述实时回转信息由所述用户理想回转信息调整至所述第二指定回转信息。10.根据权利要求1
‑
4中任一项所述的起重机回转控制方法,其特征在于,所述基于所述回转速度,对所述起重机进行回转控制,具体包括:获取所述起重机的安全限位信息;若所述安全限位信息在所述起重机的安全限位范围内,则基于所述回转速度,对所述起重机进行回转控制。11.一种起重机回转控制系统,其特征在于,包括:获取模块,用于获取起重机的臂架长度以及力矩百分比;确定模块,用于基于所述臂架长度以及所述力矩百分比,确定回转速度;控制模块,用于基于所述回转速度,对所述起重机进行回转控制。
12.一种起重机,其特征在于,包括如权利要求11所述的起重机回转控制系统。
技术总结
本发明提供一种起重机回转控制方法、系统及起重机,首先获取起重机的臂架长度以及力矩百分比;然后基于所述臂架长度以及所述力矩百分比,确定回转速度;最后基于所述回转速度,对所述起重机进行回转控制。该方法并不需要人为参与,可以自动化实现,不仅提高了起重机回转控制的自动化程度,还可以避免人为因素对控制过程的干扰,提高控制准确度。提高控制准确度。提高控制准确度。
技术研发人员:丁平 谢军 郭松 韩晓东 郭轶
受保护的技术使用者:浙江三一装备有限公司
技术研发日:2021.08.27
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。