技术特征:
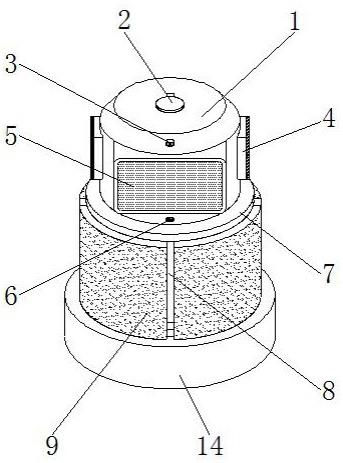
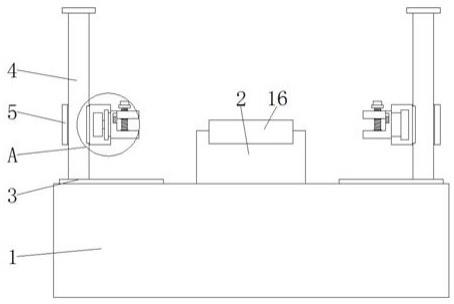
1.一种具有表面耐撞击结构的智能教育机器人,包括头部壳体(1)和机身壳体(8),其特征在于:所述头部壳体(1)的顶部设置有充电盖板(2),且充电盖板(2)的下方安装有摄像头(3),所述摄像头(3)的两侧设置有扬声器(4),且扬声器(4)的中间位置设置有显示屏(5),所述显示屏(5)的下方设置有开关(6),且开关(6)的下方设置有第一连接板(7),所述机身壳体(8)安装于头部壳体(1)的下方,且机身壳体(8)的外侧设置有防护外壳(9),所述防护外壳(9)的内部连接有减震垫层(10),且减震垫层(10)的两侧设置有伸缩套筒(11),所述伸缩套筒(11)的内部安装有弹簧(12),且弹簧(12)的下方设置有第二连接板(13),所述第二连接板(13)的下方连接有装置底座(14),且装置底座(14)的下方安装有车轮(15)。2.根据权利要求1所述的一种具有表面耐撞击结构的智能教育机器人,其特征在于:所述扬声器(4)关于头部壳体(1)的轴线对称设置有2个,且头部壳体(1)与充电盖板(2)之间为卡合连接。3.根据权利要求1所述的一种具有表面耐撞击结构的智能教育机器人,其特征在于:所述第一连接板(7)与第二连接板(13)关于机身壳体(8)相互对称,且第一连接板(7)与机身壳体(8)之间为焊接连接。4.根据权利要求1所述的一种具有表面耐撞击结构的智能教育机器人,其特征在于:所述防护外壳(9)在机身壳体(8)的外侧等角度分布,且机身壳体(8)与伸缩套筒(11)之间为焊接连接。5.根据权利要求1所述的一种具有表面耐撞击结构的智能教育机器人,其特征在于:所述伸缩套筒(11)关于防护外壳(9)的轴线对称设置有2个,且防护外壳(9)与减震垫层(10)之间为胶水连接。6.根据权利要求1所述的一种具有表面耐撞击结构的智能教育机器人,其特征在于:所述车轮(15)在装置底座(14)底部等角度分布,且装置底座(14)与机身壳体(8)之间通过第二连接板(13)构成转动安装结构。
技术总结
本实用新型属于智能教育机器人技术领域,尤其为一种具有表面耐撞击结构的智能教育机器人,包括头部壳体和机身壳体,所述头部壳体的顶部设置有充电盖板,且充电盖板的下方安装有摄像头,所述摄像头的两侧设置有扬声器,且扬声器的中间位置设置有显示屏,所述显示屏的下方设置有开关,且开关的下方设置有第一连接板,所述机身壳体安装于头部壳体的下方,且机身壳体的外侧设置有防护外壳,所述防护外壳的内部连接有减震垫层,且减震垫层的两侧设置有伸缩套筒。该具有表面耐撞击结构的智能教育机器人,具备表面耐撞击结构,在受到撞击时能够对自身提供保护,避免撞击造成内部元件损伤,提高了装置的实用性。提高了装置的实用性。提高了装置的实用性。
技术研发人员:朱松松 李祥 胡俊杰
受保护的技术使用者:森才(武汉)科技有限公司
技术研发日:2021.06.02
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。