技术特征:
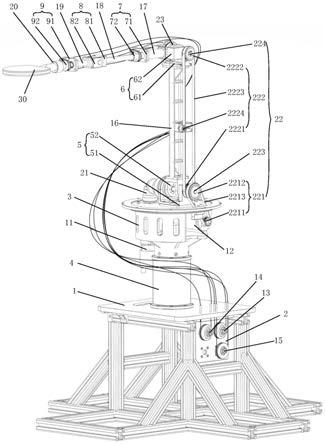
1.一种轻量化协作机械臂,其特征在于,包括基座、第一电机安装架、第二电机安装架、第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第五驱动电机以及第六驱动电机,所述第一电机安装架安装于所述基座,所述第四驱动电机、所述第五驱动电机以及所述第六驱动电机固定安装于所述第一电机安装架,所述第二驱动电机和所述第三驱动电机固定安装于所述第二电机安装架;所述第一关节的固定部固接于所述基座,所述第一关节的旋转部固接于所述第二电机安装架,并由所述第一驱动电机带动转动;所述第二关节的固定部固接于所述第二电机安装架,所述第二关节的旋转部由所述第二驱动电机带动转动;所述第三关节的固定部通过第一连杆连接于所述第二关节的旋转部,所述第三关节的旋转部由所述第三驱动电机带动转动;所述第四关节的固定部通过第二连杆连接于所述第三关节的旋转部,所述第四关节的旋转部由所述第四驱动电机带动转动;所述第五关节的固定部通过第三连杆连接于所述第四关节的旋转部,所述第五关节的旋转部由所述第五驱动电机带动转动;所述第六关节的固定部通过第四连杆连接于所述第五关节的旋转部,所述第六关节的旋转部由所述第六驱动电机带动转动,且所述第六关节的旋转部安装有末端执行器接口。2.根据权利要求1所述的轻量化协作机械臂,其特征在于,所述第一关节包括固定套筒、支撑套筒、轴承以及锁紧件,所述固定套筒固接于所述基座,所述支撑套筒通过所述轴承可转动地插设于所述固定套筒内,所述第一驱动电机的机壳固定地插设于所述支撑套筒内,所述第一驱动电机的输出轴通过所述锁紧件与所述固定套筒相接;所述第二电机安装架固接于所述支撑套筒。3.根据权利要求2所述的轻量化协作机械臂,其特征在于,所述第二驱动电机的机壳固接于所述第二电机安装架,所述第二驱动电机的输出轴通过90度转角减速器连接于所述第二关节的旋转部。4.根据权利要求3所述的轻量化协作机械臂,其特征在于,所述第三驱动电机的机壳固接于所述第二电机安装架,所述第三驱动电机的输出轴通过同步带传动机构连接于所述第三关节的旋转部。5.根据权利要求4所述的轻量化协作机械臂,其特征在于,还包括安装于所述第三关节的固定部的谐波减速器,所述同步带传动机构的输出轴通过所述谐波减速器与所述第三关节的旋转部相连。6.根据权利要求5所述的轻量化协作机械臂,其特征在于,所述同步带传动机构包括第一级带传动组件和第二级带传动组件,所述第一级带传动组件包括第一同步带轮、第二同步带轮以及第一同步带,所述第一同步带轮套接于所述第三驱动电机的输出轴,所述第二同步带轮通过第一转轴可转动地安装于所述第二电机安装架,所述第一同步带绕过所述第一同步带轮和所述第二同步带轮,并首尾相连形成闭合环路;所述第二级带传动组件包括第三同步带轮、第四同步带轮以及第二同步带,所述第三同步带轮套接于所述第一转轴;所述第四同步带轮通过第二转轴可转动地安装于所述第三关节的固定部,且所述第二转轴与所述谐波减速器的输入端同轴相接;所述第二同步带绕过所述第三同步带轮和所述第四同步带轮,并首尾相连形成闭合环路。7.根据权利要求6所述的轻量化协作机械臂,其特征在于,所述第二级带传动组件还包
括张紧轮,所述张紧轮可转动地安装于所述第一连杆,所述张紧轮压设在所述第二同步带上,以使所述第二同步带张紧。8.根据权利要求1至7中任一项所述的轻量化协作机械臂,其特征在于,所述第四驱动电机的输出端通过第一绳传动机构与所述第四关节的旋转部相连,所述第一绳传动机构包括第一驱动轮、第一从动轮以及两根第一绳索,所述第一驱动轮安装于所述第四驱动电机的输出轴;所述第一从动轮可转动地安装于所述第四关节的固定部,并固接于所述第四关节的旋转部;两根所述第一绳索分别位于所述第一驱动轮和所述第一从动轮的中心连线的两侧,且所述第一绳索的一端固接所述第一驱动轮,所述第一绳索的另一端固接所述第一从动轮;所述第五驱动电机的输出端通过第二绳传动机构与所述第五关节的旋转部相连,所述第二绳传动机构包括第二驱动轮、第二从动轮以及两根第二绳索,所述第二驱动轮安装于所述第五驱动电机的输出轴;所述第二从动轮可转动地安装于所述第五关节的固定部,并固接于所述第五关节的旋转部;两根所述第二绳索分别位于所述第二驱动轮和所述第二从动轮的中心连线的两侧,且所述第二绳索的一端固接所述第二驱动轮,所述第二绳索的另一端固接所述第二从动轮;所述第六驱动电机的输出端通过第三绳传动机构与所述第六关节的旋转部相连,所述第三绳传动机构包括第三驱动轮、第三从动轮以及两根第三绳索,所述第三驱动轮安装于所述第六驱动电机的输出轴;所述第三从动轮可转动地安装于所述第六关节的固定部,并固接于所述第六关节的旋转部;两根所述第三绳索分别位于所述第三驱动轮和所述第三从动轮的中心连线的两侧,且所述第三绳索的一端固接所述第三驱动轮,所述第三绳索的另一端固接所述第三从动轮。9.根据权利要求8所述的轻量化协作机械臂,其特征在于,所述第一从动轮、所述第二从动轮和所述第三从动轮的旋转轴线相交于一点,且所述第一从动轮和所述第三从动轮的旋转轴线均与所述第二从动轮的旋转轴线垂直。10.根据权利要求8所述的轻量化协作机械臂,其特征在于,所述第一绳传动机构还包括两个第一导向轮,两个所述第一导向轮安装于所述第一从动轮的两侧;所述第一导向轮与所述第一绳索一一对应,所述第一绳索绕过所述第一导向轮后缠绕于所述第一从动轮;所述第三绳传动机构还包括两个第三导向轮,两个所述第三导向轮安装于所述第三从动轮的两侧;所述第三导向轮与所述第三绳索一一对应,所述第三绳索绕过所述第三导向轮后缠绕于所述第三从动轮。
技术总结
本发明提供一种轻量化协作机械臂,包括基座、第一电机安装架、第二电机安装架和六个关节及其对应的驱动电机,第一电机安装架安装于基座,第四驱动电机、第五驱动电机以及第六驱动电机固定安装于第一电机安装架,第二驱动电机和第三驱动电机固定安装于第二电机安装架;第一关节的固定部固接于基座,第一关节的旋转部固接于第二电机安装架;第二关节的固定部固接于第二电机安装架,第二关节的旋转部、第三关节、第四关节、第五关节和第六关节依次通过连杆相连,第六关节的旋转部安装有末端执行器接口。该轻量化协作机械臂利用集中布置驱动电机以及紧凑的传动方式设计,提高了机械臂的稳定性与安全性,同时具有更高的工作效率。同时具有更高的工作效率。同时具有更高的工作效率。
技术研发人员:张少林 王海涛 王硕
受保护的技术使用者:中国科学院自动化研究所
技术研发日:2021.08.05
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。