技术特征:
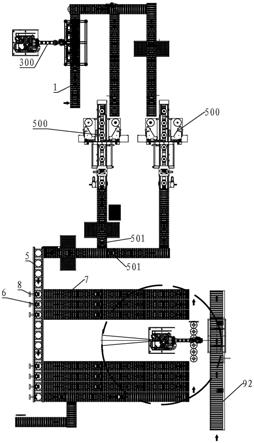
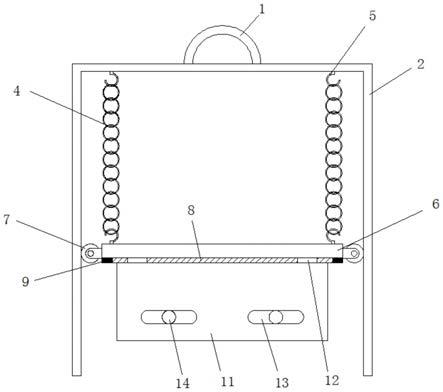
1.一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:包括:第一输送线,沿长度方向顶部的两边对称设有第一限位件,两所述第一限位件分别和所述第一输送线的顶部之间具有一卡槽,且两所述卡槽相对的侧面为敞口;丝盘,有n1个,n1≥1,包括底盘和阶梯轴;所述阶梯轴包括一大径段和一小径段;所述大径段固定连接于所述底盘上;所述小径段固定连接于所述大径段上;所述底盘、大径段和小径段同轴布置;所述小径段的外径小于丝饼芯筒的内径,所述大径段的外径大于所述丝饼芯筒的内径;各个所述丝盘的底盘置于所述第一输送线上,且插入两所述卡槽内并呈间隙配合;每所述底盘的底面还设有一id,且各个所述底盘的所述id各不相同;第一id读取装置,固定连接于所述第一输送线;重量检测装置,有n2个,n2≥1,分别设于于所述第一输送线的一侧,且分别用于检测等量的丝饼的重量;第二输送线,并连接于所述第一输送线的后方;第二id读取装置,有n3个,n3≥2,固定连接于所述第二输送线;缓存输送线,有n4个,n4=n3或者n4=n3 1,各个所述缓存输送线平行布置,且都垂直连接于所述第二输送线的一侧,且所述第二id读取装置一一对应位于所述缓存输送线的入口前方,当n4=n3 1时,位于所述第二输送线的输送方向的最后一个所述缓存输送线的入口前方不设置所述第二id读取装置;推送机构,有n5个,n5=n4,设于所述第二输送线的另一侧,并一一对应朝向所述缓存输送线;控制装置,分别和所述第一输送线、所述第一id读取装置、各个所述重量检测装置、所述第二输送线、各个所述第二id读取装置、各个所述缓存输送线及各个所述推送机构通信连接。2.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:所述id为rfid标签;所述第一id读取装置和第二id读取装置分别为rfid阅读器。3.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:每个所述推送机构包括:第一气缸,固定连接于所述第二输送的另一侧,并通信连接于所述控制装置,且活塞杆朝向所述缓存输送线;推送板,固定连接于所述第一气缸的活塞杆;其中,所述推送板的底端高于所述第二输送线的顶部,且低于所述大径段的顶面。4.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:所述第一id读取装置位于第一输送线的中心线上。5.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:各个所述重量检测装置沿平行于所述第一输送线的输送方向呈一排布置。6.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:各个所述第二id读取装置沿所述第二输送线的中心线呈一排布置。7.如权利要求1所述的一种锦纶dty丝锭参数化拼装装箱装置,其特征在于:还包括倾斜装箱机构;所述倾斜装箱机构包括:翻转支撑杆,至少有两根;
装箱输送线,设于缓存输送线的末端;所述装箱输送线的顶部沿垂直于输送方向设有一避让开口;各个所述翻转支撑杆分别置于所述装箱输送线内,并分别垂直于所述装箱输送线的输送方向,且位于所述避让开口内,且右端搭在所述装箱输送线的顶端右侧;侧边限位挡板,固定连接于各个所述翻转支撑杆的右端,且平行于所述装箱输送线的输送方向;第一连接杆,和所述翻转支撑杆的数量相等,且一一对应活动连接于所述翻转支撑杆的底部;第二连接杆,和各个所述第一连接杆固定连接,并且连接点位于各个所述第一连接杆的中心偏左,且位于所述装箱输送线的下方;翻转驱动装置,设于所述装箱输送线的下方,并活动连接于所述第二连接杆的中心位置;侧边驱动装置,设于所述装箱输送线的左侧;推板,固定连接于所述侧边驱动装置的输出端,且平行于侧边限位挡板;所述侧边驱动装置驱动所述推板朝向所述侧边限位挡板进行伸缩运动;第一检测装置,固定于所述装箱输送线的一侧,并通信连接于所述控制装置,且用于检测箱子是否输送到预定的位置;其中,所述翻转支撑杆具有两个状态:状态一,所述翻转驱动装置驱动所述第二连接杆向上升起,带动各个所述第一连接杆向右上方翻转至预定的位置,使得所述翻转支撑杆呈倾斜状态;状态二,所述翻转驱动装置驱动所述第二连接杆向下缩回到位,带动各个所述第一连接杆向下翻转,使得所述翻转支撑杆旋转至水平,且各个所述翻转支撑杆的顶端不高于所述装箱输送线的顶面。8.一种锦纶dty丝锭参数化拼装装箱方法,用于控制装置,其特征在于:包括如权利了要求1至7任一项所述的一种锦纶dty丝锭参数化拼装装箱装置,还包括两个机器人工作站,所述机器人工作站包括机器人和夹具,所述夹具一一对应安装在所述机器人上,所述夹具和机器人分别通信连接于控制装置,其中一个机器人工作站设于第一输送线的一侧,另一个机器人工作站设于缓存输送线的一侧;预设好各个第二id读取装置对应不同的重量范围,还包括以下步骤:步骤一、控制第一输送线工作,将空的丝盘输送并经过第一id读取装置,后接收第一id读取装置读取空的丝盘底部的id,并存储;当读取预定数量的丝盘的id时,控制第一输送线停止工作;步骤二、控制第一输送线一侧的机器人和夹具工作,将丝饼抓取,并放到重量检测装置进行称重;步骤三、接收重量检测装置检测的丝饼的重量,并存储;步骤四、控制第一输送线一侧的机器人和夹具工作,将丝饼抓取,将丝饼一一对应放置到空的丝盘上;并将丝饼的重量和空的丝盘底部的id进行一一对应绑定,并存储;步骤五、控制第一输送线启动工作,将装有丝饼的丝盘输送至第二输送线;步骤六、控制第二输送线工作,将丝盘和丝饼输送经过第二id读取装置,接收第二id读取装置读取装有丝饼的丝盘底部的id,并控制第二输送线停止工作等待;
步骤七、根据接收到的第二id读取装置读取的id,调用和该id绑定的重量数据,然后和该第二id读取装置对应的预设的重量范围进行比较,若该丝饼的重量在预设的重量范围内,则控制推送机构工作,将丝盘和丝饼推入该第二id读取装置对应的缓存输送线上,完成后控制推送机构复位,并控制第二输送线继续工作;否则,执行步骤八;步骤八、直接控制第二输送线继续工作,将丝盘和丝饼向下一个第二id读取装置输送,然后重复步骤七;若丝饼的重量都不在各个第二id读取装置对应的重量范围内,则当缓存输送线比第二id读取装置多1个时,控制最后一个推送机构将该丝盘和丝饼推入最后一条缓存输送线上;当缓存输送线和第二id读取装置的数量相等时,控制第二输送线停止工作,并控制报警装置发出报警提示,等待处理异常;步骤九、控制缓存输送线一侧的机器人和夹具工作,将同一缓存输送线上的丝饼装入对应的箱子内进行。
技术总结
本发明提供了一种锦纶DTY丝锭参数化拼装装箱装置及方法,包括:第一输送线;丝盘,有N1个,N1≥1;每所述底盘的底面还设有一ID,且各个所述底盘的所述ID各不相同;第一ID读取装置;重量检测装置,有N2个,N2≥1,分别用于检测等量的丝饼的重量;第二输送线,并连接于所述第一输送线的后方;第二ID读取装置,有N3个,N3≥2;缓存输送线,有N4个,N4=N3或者N4=N3 1;推送机构,有N5个,N5=N4;控制装置。丝饼由重量检测装置测得重量后,反馈给控制装置,可和丝盘的ID绑定,控制装置控制推送机构将位于不同重量范围的丝饼和丝盘推到相应的缓存输送线上,从实现按重量进行区别丝饼,实现分类包装。装。装。
技术研发人员:梅震 肖卫民
受保护的技术使用者:福建省恒新纤维材料有限公司
技术研发日:2021.09.08
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。