1.本发明属于液压管道检测技术领域,具体涉及一种液压启闭机管道连接密封性检测技术。
背景技术:
2.应用于船闸的闸阀门启闭机通常采用液压传动式,工作闸门的拖动是通过液压活塞杆的往复运动来实现的,其机械能的传递媒介是液压油。液压传动式启闭机通常由液压油泵系统和油路切换系统(控制阀组)构成,电动机驱动油泵为启闭机提供机械能,油路切换系统改变液压油在油缸中的进出方向,实现活塞杆的往复运动和制动(持住)。三峡船闸运行近二十年来,其人字闸门的拖动控制系统和液压启闭系统运行平稳,工作可靠,但是由于长时间的超负荷运行,设备超期服役致使工作性能下降,故障频发,对船闸安全稳定运行带来巨大压力,近年来因液压启闭系统高压油管及相关连接部件破损失效致使液压油泄漏典型故障增长了70%,极大地影响了闸、阀门的正常运行,也阻断了船闸正常通航。
3.三峡船闸人字闸门液压启闭系统因闸门运转载荷不稳定,尤其是当闸门突然遇到与负载方向相反的大风、大浪时,闸门易因速度失控而导致压力波动甚至管路受冲击而振动,特别是为适应不同淹没水深下外负载的变化,液压启闭系统高压管路承受不同程度的应力,使相关部位遭受冲击损坏或焊接部位开裂等不同程度结构失效,对三峡船闸的安全稳定运行带来较大风险。一旦油缸缸旁油管或控制阀组与油缸连接管道出现缺陷致使液压油大量泄漏,将无法实现人字闸门应急运行,必须通过长时间的停航检修,对检修人员的技能水平和劳动强度提出了很高的要求,也存在较大的碍航风险,液压油管作为液压系统中的关键部件,其性能的好坏对整个液压系统运行的可靠性有着重要影响,但是目前缺乏有效的检测手段对关键管路连接密封性和管道缺陷进行检测分析和处理。近年来,基于视觉的伺服控制和巡检机器人在工业装配、海洋探测和医疗器械等众多领域得到了成功应用,在需要依据作业环境变化自适应的自动对指定的伺服任务做出有效决定,确保工作的顺利完成。因此,需要设计一种液压启闭机管道检测系统,实现管道腐蚀、变形、裂纹、焊缝、疲劳破坏或管道内部潜在缺陷的自动化远程检测,避免因缺陷进一步发展成破损而引起事故。
4.例如申请号为2019112349904的专利文献公开了一种海洋工程用全自动海底管道巡检机器人,包括行走车体和拍摄体架,行走车体上设置有摄像头,拍摄体架上设置有照相机体,拍摄体架经底座固定设置在行走车体的表面上,采用轮式和履带式相结合的方式作为行走车体的行进动力,且行走轮和履带均采用步进电机独立驱动,使行走车体在海底管道内的行走具有足够动力,通过在行走车体上设置360
°
全景摄像头,当行走车体在海底管道内部行走时,通过360
°
全景摄像头实现对管道内部的情况进行摄像,当海底管道内部产生腐蚀、变形、裂纹等问题时,通过照相机体对海底管道内部情况进行拍摄,实现360
°
全景摄像头与照相机体在拍摄过程中的动静结合。
5.上述这类现有技术无法直接应用于液压启闭机管道密封性检测。
技术实现要素:
6.本发明的目的是为了提供一种能很好的应用于液压启闭机管道密封性检测的技术。
7.一种液压启闭机管道连接密封性检测系统,它包括行走装置、设置在行走装置上的检测装置、以及信号处理装置;
8.行走装置用于在液压管道内贴合管道内壁且可调整展开幅度地行走;
9.检测装置包括3d结构光相机、噪音感应器、振动感应器、流量传感器;
10.所述检测装置用于数据的收集,对收集到的数据经过数据处理及分析后得到管道内连接密封情况出现部位坐标信息、变形及噪音和振动异常信息。
11.上述行走装置包括驱动装置、支撑装置、弹性装置和调节装置;
12.支撑装置作为检测装置安装支撑的载体;调节装置用于根据液压管道内径大小自适应调整行走装置展开幅度;弹性装置保证行走装置与管壁可靠贴合;检测装置固定设置于行走装置上,检测装置包括3d结构光相机、噪音感应器、振动感应器和流量传感器;控制装置包括控制模块、通讯模块、图像处理模块、数据处理模块、检测输出模块。
13.上述驱动装置设置于支撑装置末端,驱动装置与支撑装置之间安装有弹性装置,支撑装置内部安装有调节装置;
14.检测装置固定设置于行走装置的支撑装置上,检测装置包括3d结构光相机、噪音感应器、振动感应器和流量传感器;
15.信号处理装置包括控制模块、通讯模块、图像处理模块、数据处理模块、检测输出模块;
16.图像处理模块主要包含预处理单元、快速识别单元、定位单元;
17.检测装置中3d结构光相机、噪音感应器、振动感应器和流量传感器分别通过信号处理装置中通讯模块与后台服务器连接,所检测的图片、声波、应变和流量数据信息经过图像处理模块、数据处理模块处理,通过检测输出模块输出,并通过通讯模块传输至后台服务器,后台服务器对数据进行分析判断,得到管道内部连接密封性情况出现部位坐标信息、变形及噪音和振动异常信息。
18.一种液压启闭机管道连接密封性检测方法,它包括以下步骤:
19.步骤1:3d结构相机进行图像的采集,将采集到的图像进行预处理;
20.步骤2:将预处理后的图像进行灰度化处理,根据设置精度旋转模型图建立模板图像集合,提取模板图像集合轮廓,并进行二值化;
21.步骤3:检测装置对行走装置沿管路移动过程中检测处理得到的图像信息进行快速识别,同时噪音感应器、振动感应器、以及流量传感器对特定位置区域噪音声波和应变、流量信息进行采集处理,并进行数据处理、绘制、输出检测图;
22.步骤4:由步骤3获得的检测图,对目标区域进行判断是否存在密封性缺陷,如果存在缺陷,利用最小包围矩或最小包围三角计算角点位置,获取角度、中心以进行定位;
23.步骤5:由步骤4获得多组定位结果,根据定位前获取图像时的时刻,计算多组定位数据对应的行走装置的速度,利用最小二乘法计算准确行走装置速度。
24.在步骤1中,具体的,通过图像处理模块对3d结构相机进行标定,将图像坐标系转换为像素坐标系,将空间中任意一点的图像坐标系下坐标转换为相机坐标系的坐标值,采
用相机构建高速视觉观测器,采用最大相关熵卡尔曼滤波算法设计观测器;其中,预处理主要是在图像特征提取前对图像进行去噪处理,采用观测器对含有噪声的图像特征向量观测,结合领域均值法、中值滤波法和高斯滤波算法对图像进行处理。
25.在步骤2中,所述模板图像采集于已有裂纹、焊缝这类存在密封性缺陷的图像,利用目标几何形状特征、颜色特征及纹理特征对图像中的目标进行特征提取,从而获取目标特征信息;
26.基于几何特征的模板匹配算法,建立匹配模板,通过提取图像中目标对象的面积、边缘、角点、曲率、图像矩、梯度特征信息,与匹配模板进行相似判断,求解匹配模板的平移矩阵与旋转矩阵,并通过标定获得的图像与世界坐标系的关系,映射到世界坐标系中,从而获得行走装置快速移动当前时刻的位置和姿态识别。
27.在步骤3中,在对采集到的噪音音波和应变、流量信息进行数据处理时,利用基于峰度检验和小波阈值算法结合的小波包分解联合降噪方法剔除随机干扰信号和噪声;即将噪音、振动信息进行峰度检验,确定脉冲噪音的影响区间,通过对区间内信号进行小波分解并对其系数作阈值处理,对处理后的小波包系数进行重构,并利用处理后的分解系数进行小波逆变换得到降噪后的信号。对采集的流量信号,通过截取一定时间长度的流量信号,在这段时间内用功率谱密度来对信号的能量特性进行描述,获取流量泄漏信号的能量集中频段。
28.在步骤3中,具体包括以下步骤:
29.1)峰度检测,利用峰度作为特征指标,以表征振动信号中的脉冲信号,采集得到的数据为a
i
(i=1,2,3,...,n),峰度计算式为:
[0030][0031]
式中,k为峰度系数,n为信号的总采样点数,a
i
是第i个采样点,μ和σ分别是采集得到的数据的均值和标准差;将原始采集信号进行q等分,每段长度为l,当l取确定值时,根据上式得到一系列峰度值{k
m
},m=1,2,...,q;对这一系列峰度值进行统计,求得在此l值条件下的变异度c
vm
,其定义为
[0032][0033]
式中,σ(k
m
)为各段数据峰度的标准差,是各段数据峰度的均值,c
vm
越大说明脉冲噪声与非脉冲信号差异度越大,而c
vm
越小说明脉冲噪声与非脉冲信号的差异度较小;
[0034]
选取变异度最大值对应的l值,对信号进行划分,随后根据结果找出超过阈值的峰度值对应时间段即可确定脉冲噪声出现的时间区域;
[0035]
2)阈值的选择和阈值函数,在消噪的过程中有两个较为关键的问题,即阈值的选择和阈值函数的选择,固定阈值的选择方式,它产生的是一个最小均方误差的极值,其阈值的计算方法为:数;
[0036]
求得阈值之后,便要通过阈值函数来对小波系数进行处理,阈值函数:
[0037][0038]
式中,n为信号长度,σ为信号的均方差,λ是阈值,sgn(*)为函数符号,当小波系数绝对值小于阈值λ时令其为0,不同的是阈值λ小于小波系数绝对值时,则令其都减去阈值。
[0039]
3)功率谱密度计算,信号的自相关函数描述随机信号即所采集的流量信号x(t)在不同时刻下其取值的相关程度,表征信号在时域特征下的统计特征,计算功率谱前首先求取截取信号的自相关函数,再对其进行傅里叶变换,得到信号的功率谱。
[0040][0041][0042]
式中,x(t)表示流量信号,*表示卷积运算符,x
*
(
‑
τ)表示取共轭,s
x
(ω)表示信号的功率谱密度,r
x
(τ)表示功率谱,t是时间。
[0043]
与现有技术相比,本发明具有如下技术效果:
[0044]
1)本发明提供了自动化监测液压启闭机管道连接密封性的检测、控制系统,实现了不同管径管道缺陷的自适应检测,为船闸液压启闭机安全稳定运行提供了技术保障,实现船闸设备状态的自动化检测;
[0045]
2)本发明提出了利用3d结构光相机、噪音感应器、振动感应器和流量传感器,并构建特定区域图像、声波和应变、流量多种特征检测处理,建立科学的管道渗漏和缺陷等密封性评判手段,为液压启闭机管道多特征智能观测提供了参考;
[0046]
3)本发明基于视觉伺服及人工智能算法构建的密封性检测系统实现对特殊环境下行走感知一体化智能检测及控制系统提供一定的技术方案,将难以直接观测感知的管道密封性问题付诸智能化方法和感应手段,具有推广实用价值。
附图说明
[0047]
下面结合附图和实施例对本发明作进一步说明:
[0048]
图1为本发明中系统的结构框图;
[0049]
图2为本发明中方法的控制流程图;
[0050]
图3为本发明中图像处理模块的工作流程图;
[0051]
图4为本发明实施例中模型创建过程示意图;
[0052]
图5为本发明实施例中图像预处理过程示意图;
[0053]
图6为本发明实施例中快速识别流程示意图;
[0054]
图7为本发明实施例中初始化过程坐标系变换示意图;
[0055]
图8为本发明实施例中初始化过程中畸变修正示意图。
具体实施方式
[0056]
实施例选择三峡连续五级船闸闸阀门液压启闭机作为实施对象对本发明的技术方案作具体实施说明。
[0057]
一种液压启闭机管道连接密封性检测系统,其硬件部分包括用于驱动和支撑的行走装置以及检测装置,行走装置还包含驱动装置、支撑装置、弹性装置和调节装置,支撑装置作为检测装置安装支撑的载体,调节装置根据液压管道内径大小自适应调整行走装置展开幅度,弹性装置保证行走装置与管壁可靠贴合;所述检测装置固定设置于行走装置上,主要包括3d结构光相机、噪音感应器、振动感应器和流量传感器;其信号处理部分包括通讯模块、图像处理模块、检测输出模块和电源模块。
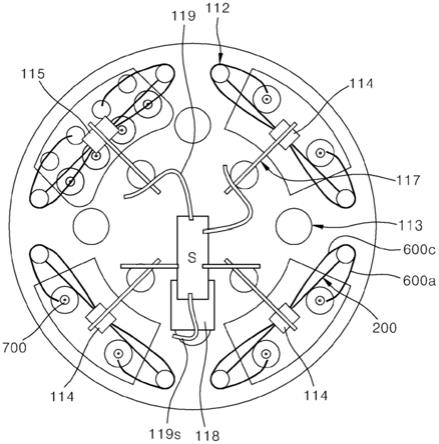
[0058]
行走装置沿周向均匀分布,驱动装置设置于支撑装置末端,驱动装置与支撑装置之间安装有弹性装置,支撑装置内部安装有调节装置。所有装置结构采用耐油、防腐蚀性材料制作而成。
[0059]
检测装置固定设置于所述行走装置的支撑装置上,包括3d结构光相机、噪音感应器、振动感应器和流量传感器,3d结构光相机与噪音感应器、振动感应器和流量传感器通过电线电性连接,并由所述电源模块供电。
[0060]
信号处理部分包括控制模块、通讯模块、图像处理模块、检测输出模块和电源模块,所述通讯模块与检测系统后台服务器进行数据收发。图像处理模块主要包含预处理单元、快速识别单元、定位单元。
[0061]
检测装置中3d结构光相机、噪音感应器、振动感应器和流量传感器分别通过所述软件模块中通讯模块与后台服务器连接,所检测的图片、声波、应变和流量数据信息经过图像处理模块和数据处理模块一定的处理,通过检测输出模块输出,并通过通讯模块传输至后台服务器,后台服务器对数据进行分析判断,得到管道内部变形、裂纹、焊缝等连接密封性情况出现部位坐标信息、变形及噪音和振动异常信息。
[0062]
本发明还包括一种液压启闭机管道连接密封性检测方法,包括以下步骤,
[0063]
步骤1:控制模块在接收到远程启动指令后,3d结构相机开始采集视频图像,并将获取到的视频图像通过通讯模块无线传送至图像处理模块,对图像信息进行相应预处理和分析,滤波消除干扰和噪音;
[0064]
步骤2:根据所获取的模板图像,进行灰度化处理,根据设置精度旋转模型图建立模板图集合,提取模板图集合轮廓,二值化后载入控制模块的模型寄存器;
[0065]
步骤3:对行走装置沿管路移动过程中检测处理得到的图像信息进行快速识别,同时噪音感应器、振动感应器和流量传感器对特定位置区域噪音声波和应变、流量信息进行采集处理,同时通过数据处理模块的处理,通过通讯模块传输至检测输出模块,绘制并输出检测图;
[0066]
步骤4:根据步骤3快速识别结果,对目标区域粗裁剪,轮廓提取判断是否存在裂纹、焊缝等密封性缺陷,如果是存在缺陷,利用最小包围矩或最小包围三角计算角点位置,获取角度,中心,进行定位;
[0067]
步骤5:根据步骤4的多组定位结果,根据定位前获取图像时的时刻,计算多组定位数据的行走装置速度,利用最小二乘法计算准确的行走装置速度,并载入控制模块的发送寄存器;
[0068]
如图2所示,在控制模块接收到启动指令后,进行初始化,建立通讯,初始化成功后多线程启动,同步启动行走装置控制线程、3d结构光相机线程、振动和噪音感应器控制线程、流量传感器控制线程和相机启停控制线程,分别进行相应控制线程的初始化,在相机启
动之后,就根据相机拍摄图像,接收图像并进行图像处理后发送结果至服务器端,行走装置的控制依据图像处理的结果,后续振动和噪音感应器控制线程以及流量传感器控制线程在行走装置停止、相机启动信号置零后方可启动,检测完毕后相机启动信号置零,相机关闭。相机启停控制线程初始化后,根据控制端接收的信号决定相机启动需要信号,所有检测的图像、声波、应变和流量数据信息经过图像处理模块和数据处理模块一定的处理,通过检测输出模块输出。
[0069]
步骤1中,还包括下列步骤:图像处理模块对3d结构相机进行标定,将图像坐标系转换为像素坐标系,将空间中任意一点的图像坐标系下坐标转换为相机坐标系的坐标值。采用相机构建高速视觉观测器,采用最大相关熵卡尔曼滤波算法设计观测器,所述预处理主要是在图像特征提取前对图像进行去噪处理,采用观测器对含有噪声的图像特征向量观测,结合领域均值法、中值滤波法和高斯滤波算法对图像进行处理。
[0070]
步骤2中,所述模板图像采集于已有裂纹、焊缝等密封性缺陷图像,利用目标几何形状特征、颜色特征及纹理特征对图像中的目标进行特征提取,从而获取目标特征信息。
[0071]
基于几何特征的模板匹配算法,建立匹配模板,通过提取图像中目标对象的面积、边缘、角点、曲率、图像矩、梯度特征信息,与匹配模板进行相似判断,求解匹配模板的平移矩阵与旋转矩阵,并通过标定获得的图像与世界坐标系的关系,映射到世界坐标系中,从而获得行走装置快速移动当前时刻的位置和姿态识别。
[0072]
步骤3中,所述数据处理模块对数据的处理主要是利用基于峰度检验和小波阈值算法相结合的小波包分解联合降噪方法剔除随机干扰信号和噪声,该方法将噪音及振动感应器采集的原始信号进行峰度检验,确定脉冲噪音的影响区间,通过对区间内的信号进行小波分解且对其系数作阈值处理,对处理后的小波包系数进行重构,并利用处理后的分解系数进行小波逆变换得到降噪后的信号。对采集的流量信号,通过截取一定时间长度的流量信号,在这段时间内用功率谱密度来对信号的能量特性进行描述,获取流量泄漏信号的能量集中频段。
[0073]
1)峰度检测,利用峰度作为特征指标,以表征振动信号中的脉冲信号,采集得到的数据为a
i
(i=1,2,3,...,n),峰度计算式为:
[0074][0075]
式中,k为峰度系数,n为信号的总采样点数,a
i
是第i个采样点,μ和σ分别是采集得到的数据的均值和标准差。将原始采集信号进行q等分,每段长度为l,当l取确定值时,根据上式得到一系列峰度值{k
m
},m=1,2,...,q。对这一系列峰度值进行统计,求得在此l值条件下的变异度c
vm
,其定义为
[0076][0077]
式中,σ(k
m
)为各段数据峰度的标准差,是各段数据峰度的均值。c
vm
越大说明脉冲噪声与非脉冲信号差异度越大,而c
vm
越小说明脉冲噪声与非脉冲信号的差异度较小。选取变异度最大值对应的l值,对信号进行划分,随后根据结果找出超过阈值的峰度值对应时间段即可确定脉冲噪声出现的时间区域。
[0078]
2)阈值的选择和阈值函数,在消噪的过程中有两个较为关键的问题,即阈值的选择和阈值函数的选择,固定阈值的选择方式,它产生的是一个最小均方误差的极值。其阈值的计算方法为:求得阈值之后,便要通过阈值函数来对小波系数进行处理,使用不同的阈值函数所得降噪的结果也不相同。阈值函数:
[0079][0080]
式中,n为信号长度,σ为信号的均方差,λ是阈值,sgn(*)为函数符号,当小波系数绝对值小于阈值λ时令其为0,不同的是阈值λ小于小波系数绝对值时,则令其都减去阈值。
[0081]
3)功率谱密度计算,信号的自相关函数描述随机信号即所采集的流量信号x(t)在不同时刻下其取值的相关程度,表征信号在时域特征下的统计特征,计算功率谱前首先求取截取信号的自相关函数,再对其进行傅里叶变换,得到信号的功率谱。
[0082][0083][0084]
式中,x(t)表示流量信号,*表示卷积运算符,x
*
(
‑
τ)表示取共轭,s
x
(ω)表示信号的功率谱密度,r
x
(τ)表示功率谱,t是时间。
[0085]
本实施例中,初始化过程包含畸变修正,图像坐标系转换为像素坐标系:
[0086][0087]
空间中任意一点的图像坐标系下坐标转化为相机坐标系的坐标值:
[0088][0089][0090]
其中:u,v分别是图像平面中任意一点的横纵坐标,u0,v0分别是图像平面中心点的横纵坐标,x,y分别是摄像机坐标平面中任意一点横纵坐标,r为右手系下旋转矩阵(3个自由度),t为右手系下平移矩阵,空间任意一点p在相机坐标系下坐标是(x,y,z),在世界坐标系下的坐标为(x
w
,y
w
,z
w
)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。