技术特征:
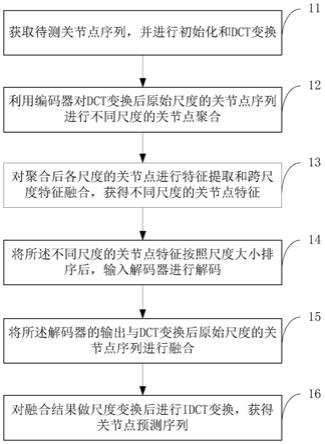
1.自动驾驶方法,其特征在于,该方法包括模型构建阶段(a)、破坏性预测阶段(b)以及驾驶策略构建与执行阶段(c);其中,模型构建阶段(a)包括以下步骤:a1、以震级区间为分类属性对地震历史道路破坏图像进行初次分类;a2、以给定的震源深度区间为分类属性对经过初次分类后的地震历史道路破坏图像进行二次分类;a3、以震中为中心向外扩散出多个震区,以所属震区为分类属性对经过二次分类后的地震历史道路破坏图像进行三次分类以构建出多组数据集;a4、分别对每组数据集进行目标物、目标物对应特征属性以及目标物对应分类标签的结果识别以获取针对每组数据集中每个目标物的样本集,其中,目标物为倒塌后对道路通行产生阻碍的物体,目标物对应分类标签为倒塌与不倒塌;a5、构建与目标物对应的朴素贝叶斯分类模型,将每个目标物的样本集拆分为训练集与验证集,利用训练集对朴素贝叶斯分类模型进行训练并利用验证集对训练结果进行验证;其中,破坏性预测阶段(b)包括以下步骤:b1、接收地震预警信息,其中该地震预警信息至少包括震中位置、震级以及震源深度;b2、获取车辆位置信息,根据该车辆位置信息与地震预警信息计算出车辆所属震区并获取与其所属震区对应的样本集;b3、获取车辆行驶方向上预设范围内的目标物并对其进行特征属性的识别;b4、将识别出的目标物的特征属性输入至与目标物对应的朴素贝叶斯分类模型以计算出与该目标物对应的分类标签并输出;b5、在读取的输出结果为倒塌时将该目标物确认为倒塌目标;其中,驾驶策略构建与执行阶段(c)包括以下步骤:c1、获取所有被确认为倒塌目标的目标物并根据该目标物的特征属性以及道路数据生成等比例的目标物倒塌的道路模型;c2、控制车辆进入自动驾驶模式,根据该道路模型生成针对车辆的安全驾驶策略并根据该安全驾驶策略对车辆进行相应的驾驶控制。2.根据权利要求1所述的自动驾驶方法,其特征在于,该地震历史道路破坏图像为视频格式;当目标物对应分类标签为倒塌时,其还具有倒塌时间间隔的子分类标签;其中,倒塌时间间隔是指目标物自地震时间至倒塌时间的时间间隔;在步骤a4中,当识别出目标物对应分类标签为倒塌时,还包括:分别对每组数据集进行目标物对应子分类标签的识别。3.根据权利要求2所述的自动驾驶方法,其特征在于,步骤c1包括:获取所有被确认为倒塌目标的目标物以及与其对应的子分类标签,根据道路数据、该目标物的特征属性以及与其对应的子分类标签生成等比例的标识有目标物倒塌时间的道路模型。4.根据权利要求1所述的自动驾驶方法,其特征在于,步骤a1包括:以地形种类为分类属性对地震历史道路破坏图像进行预先分类,以震级区间为分类属
性对预先分类后的地震历史道路破坏图像进行初次分类;其中,地形种类包括平原、山地、丘陵、高原以及盆地。5.根据权利要求1所述的自动驾驶方法,其特征在于,步骤a1包括:以土壤属性区间为分类属性对地震历史道路破坏图像进行预先分类,以震级区间为分类属性对预先分类后的地震历史道路破坏图像进行初次分类;其中,土壤属性区间为土壤硬度区间和/或土壤厚度区间。6.根据权利要求1所述的自动驾驶方法,其特征在于,步骤a3包括:以震中为圆心、给定的间距为半径,向外旋转扩散出一圆形震区,并根据该间距向圆形震区外依次扩散出多个环形震区;以该形圆震区以及多个环形震区为分类属性对经过二次分类后的地震历史道路破坏图像进行三次分类以构建出多组数据集。7.根据权利要求1~6任一项所述的自动驾驶方法,其特征在于,步骤c2包括:从该道路模型中获取出无目标物倒塌区域,根据获取的无目标物倒塌区域判断在行驶方向上是否存在供车辆正常通过的路径,若存在则将该路径确认为目标路径,并控制车辆进行自动前进以通过该目标路径。8.根据权利要求1~6任一项所述的自动驾驶方法,其特征在于,步骤c2包括:从该道路模型中获取出无目标物倒塌区域,根据获取的无目标物倒塌区域判断在行驶方向上是否存在供车辆停放的路肩区域,若存在则将该路肩区域确认为目的地,并控制车辆进行自动驾驶以驶入该目的地进行停放。9.根据权利要求1~6任一项所述的自动驾驶方法,其特征在于,在步骤b4之前,还包括:获取与车辆行驶方向相反方向上预设范围内的目标物并对其进行特征属性的识别。10.根据权利要求9所述的自动驾驶方法,其特征在于,步骤c2包括:从该道路模型中获取出无目标物倒塌区域,根据获取的无目标物倒塌区域判断在与行驶方向相反的方向上是否存在供车辆停放的路肩区域,若存在,则将该路径确认为目的地,并控制车辆进行自动退避以行驶至该目的地进行停放。
技术总结
基于朴素贝叶斯分类算法的道路破坏性预测自动驾驶方法,包括模型构建阶段a、破坏性预测阶段b及驾驶策略构建与执行阶段c;通过阶段a对地震历史道路破坏图像进行三次分类以构建出多组数据集,通过对每组数据集进行识别以获取针对每组数据集中每个目标物的样本集,基于构建的朴素贝叶斯分类模型对目标物进行训练;通过阶段b计算出车辆所属震区并获取与其所属震区对应的样本集,对车辆行驶方向上的目标物并对其进行特征属性的识别;计算出与该目标物对应的倒塌分类标签以将其确认为倒塌目标;通过阶段c生成目标物倒塌的道路模型并对车辆进行相应的自动驾驶控制。以便对车辆进行与道路破坏性预测结果相对应的驾驶策略控制以避开倒塌的目标物。倒塌的目标物。倒塌的目标物。
技术研发人员:宫雪峰
受保护的技术使用者:宫雪峰
技术研发日:2021.09.27
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。