技术特征:
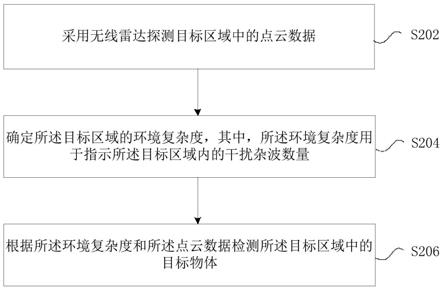
1.一种基于无线雷达的目标检测方法,其特征在于,包括:采用无线雷达探测目标区域中的点云数据;确定所述目标区域的环境复杂度,其中,所述环境复杂度用于指示所述目标区域内的干扰杂波数量;根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体。2.一种如权利要求1所述的目标检测方法,其特征在于,根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体包括:根据所述环境复杂度设置所述目标区域的目标形成条件,其中,所述目标形成条件包括点云点数阈值和点云信噪比阈值,所述环境复杂度与所述点云点数阈值和所述点云信噪比阈值均呈正相关;对所述点云数据进行聚类,得到多个候选目标;基于所述目标形成条件在所述多个候选目标中判断所述候选目标是否为真实目标。3.一种如权利要求2所述的目标检测方法,其特征在于,基于所述目标形成条件在所述多个候选目标中判断所述候选目标是否为真实目标包括:针对所述点云数据聚类后得到的所述多个候选目标,提取所述候选目标的聚类中心;基于所述聚类中心定位候选目标所在的候选区域;计算所述候选区域的实际点云数量和实际信噪比;判断所述实际点云数量和所述实际信噪比是否满足所述目标形成条件;若述实际点云数量和所述实际信噪比满足所述目标形成条件,确定所述候选目标为真实目标,否则为虚假目标。4.一种如权利要求3所述的目标检测方法,其特征在于,判断所述实际点云数量和所述实际信噪比是否满足所述目标形成条件包括:判断所述实际点云数量是否大于所述点云点数阈值,以及判断所述实际信噪比是否大于所述点云信噪比阈值;若所述实际点云数量大于所述点云点数阈值,且所述实际信噪比大于所述点云信噪比阈值,确定所述实际点云数量和所述实际信噪比满足所述目标形成条件。5.一种如权利要求2所述的目标检测方法,其特征在于,对所述点云数据进行聚类,得到多个候选目标,包括:在所述点云数据中随机选择一个起始点;以所述起始点为中心点,依次选取所述点云数据中剩下的一个点并计算与所述起始点之间的间隔距离;判断所述间隔距离是否大于距离阈值;若所述间隔距离大于或等于所述距离阈值,则舍弃当前点,在所述点云数据中继续选择剩下的点进行遍历;若所述间隔距离小于所述距离阈值,则保存当前点,计算当前点与起始点之间的中心点,并在采用所述中心点更新所述起始点之后继续遍历所述点云数据中剩下的点,直到遍历完所述点云数据;在遍历完所述点云数据之后,将最后的中心点为圆心,所述距离阈值为半径围成的区域确定为一个候选目标。6.一种如权利要求2所述的目标检测方法,其特征在于,在根据所述环境复杂度设置所
述目标区域的目标形成条件之后,所述方法还包括:根据所述无线雷达的探测强度将所述目标区域划分为多个子区域,其中,每个探测强度区间对应一个子区域;针对每个子区域,在所述目标形成条件中选择与所述子区域的探测强度匹配的目标形成子条件,其中,每个子区域对应一套目标形成子条件,所述探测强度与所述点云点数阈值和所述点云信噪比阈值均呈正相关。7.一种如权利要求1所述的目标检测方法,其特征在于,确定所述目标区域的环境复杂度包括:对所述目标区域进行扫描,检测所述目标区域中的金属类物品和遮挡物;计算所述金属类物品的第一数量,以及计算所述遮挡物的第二数量;若所述第一数量大于第一阈值,确定所述目标区域的环境复杂度为第一复杂度;若所述第一数量小于第一阈值,所述第二数量小于第二阈值,确定所述目标区域的环境复杂度为第二复杂度;若所述第一数量小于第一阈值,所述第二数量大于第二阈值,确定所述目标区域的环境复杂度为第三复杂度,其中,所述第一复杂度大于所述第二复杂度,所述第二复杂度大于所述第三复杂度。8.一种基于无线雷达的目标检测装置,其特征在于,包括:探测模块,采用无线雷达探测目标区域中的点云数据;确定模块,确定所述目标区域的环境复杂度,其中,所述环境复杂度用于指示所述目标区域内的干扰杂波数量;检测模块,根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体。9.一种存储介质,其特征在于,所述存储介质包括存储的程序,其中,所述程序运行时执行上述权利要求1至7中任一项所述的方法步骤。10.一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;其中:存储器,用于存放计算机程序;处理器,用于通过运行存储器上所存放的程序来执行权利要求1至7中任一项所述的方法步骤。
技术总结
本发明公开了一种基于无线雷达的目标检测方法及装置,属于雷达技术领域。其中,该方法包括:采用无线雷达探测目标区域中的点云数据;确定所述目标区域的环境复杂度,其中,所述环境复杂度用于指示所述目标区域内的干扰杂波数量;根据所述环境复杂度和所述点云数据检测所述目标区域中的目标物体。通过本发明,通过确定目标区域的环境复杂度,并采用环境复杂度辅助检测目标区域中的目标物体,降低了环境因素对目标物体的检测干扰,解决了现有技术中无线雷达目标检测不准确的技术问题,提高了雷达目标检测的准确率,增加了无线雷达的适用场景。景。景。
技术研发人员:罗晓宇 陈向文 陈翀 岳冬
受保护的技术使用者:珠海联云科技有限公司
技术研发日:2021.11.17
技术公布日:2022/3/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。