技术特征:
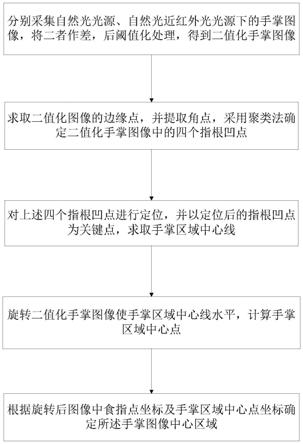
1.一种确定手掌图像中心区域的方法,其特征在于,包括以下步骤:(1)对分别采集的自然光光源、自然光-近红外光组合光源下的手掌图像作差,后预处理,得二值化手掌图像;(2)求取二值化手掌图像的边缘点,并提取角点,采用聚类法确定二值化手掌图像中的四个指根凹点;(3)对上述四个指根凹点进行定位,并以定位后的指根凹点为关键点,求取手掌区域的中心线和中心点;(4)旋转二值化手掌图像使中心线水平,根据旋转后图像中关键点及中心点坐标确定所述手掌图像中心区域。2.根据权利要求1所述的确定手掌图像中心区域的方法,其特征在于,步骤(1)中,所述预处理包括以下步骤:对作差后得到的差值图像进行阈值化处理,保留其中面积最大的连通域并对最大的连通域中的空洞进行填充,得到二值化手掌图像。3.根据权利要求2所述的确定手掌图像中心区域的方法,其特征在于,所述阈值化处理包括以下步骤:对于差值图像中的所有像素点,将其与一设定阈值作比较,若该像素点的像素值大于或等于该阈值,则置该像素点的值为1,若像素值小于该阈值,则置该像素点的值为0。4.根据权利要求3所述的确定手掌图像中心区域的方法,其特征在于,步骤(2)中,求取二值化手掌图像的边缘点,并提取角点包括以下步骤:选取二值化手掌图像中任一值为1的像素点为当前像素点,对于当前像素点,若其8个相邻像素点中存在值为0的像素点,则当前像素点为边缘点;以二值化手掌图像上每个边缘点为中心,若该边缘点设定半径邻域内值为1的像素点个数占该邻域内所有像素点个数的比例大于设定阈值,则该边缘点为角点。5.根据权利要求1所述的确定手掌图像中心区域的方法,其特征在于,步骤(2)中,采用聚类法确定四个指根凹点,包括以下步骤:将所有角点存入主集合中,选取任一角点,将该角点以及与该角点距离小于设定阈值的角点存入子集合中,并将该子集合中的所有角点从主集合中删除;重复上述步骤,直至主集合为空,得到多个子集合,保留子集合中角点个数排列前四的四个子集合;计算每个子集合中所有角点的均值,得到每个子集合的类中心,即四个指根凹点。6.根据权利要求1所述的确定手掌图像中心区域的方法,其特征在于,步骤(3)中,通过以下步骤对得到的四个指根凹点进行定位:分别计算每个指根凹点与其它三个指根凹点之间的距离之和,其中与其它三个指根凹点之间的距离之和最大的指根凹点为大拇指-食指凹点;对于其它三个指根凹点,按照与大拇指-食指凹点的欧式距离从小到大依次为食指-中指凹点、中指-无名指凹点和无名指-小指凹点。7.根据权利要求6所述的确定手掌图像中心区域的方法,其特征在于,步骤(3)中,以判定后的指根凹点为关键点,求取手掌区域的中心线和中心点的具体操作如下:以食指-中指凹点、中指-无名指凹点和无名指-小指凹点为关键点,作经过中指-无名
指凹点并垂直于食指-中指凹点与无名指-小指凹点连线的直线,得到手掌区域的中心线;取中心线与二值化手掌图像相交的线段,该线段的中点即为手掌区域的中心点。8.根据权利要求6所述的确定手掌图像中心区域的方法,其特征在于,步骤(3)中,求取手掌区域中心线及手掌区域中心点之前,对关键点食指-中指凹点和无名指-小指凹点做如下调整:连接食指-中指凹点和中指-无名指凹点得到一线段,将该线段向食指方向延伸设定长度,将该线段延伸方向的端点作为代替食指-中指凹点的关键点;连接中指-无名指凹点和无名指-小指凹点得到一线段,将该线段向小指方向延伸设定长度,将该线段延伸方向的端点作为无名指-小指凹点的关键点。9.根据权利要求6所述的确定手掌图像中心区域的方法,其特征在于,步骤(4)按照以下操作进行:旋转二值化手掌图像使中心线水平,计算食指-中指凹点和无名指-小指凹点中任一点与中心点在旋转后图像中的坐标,分别计算中心点与食指-中指凹点或无名指-小指凹点之间的行数和列数之差,以行数之差的2倍为高,列数之差的2倍为宽,作以中心点为中心,宽呈水平的矩形,即得二值化手掌图像的中心区域。10.根据权利要求9所述的确定手掌图像中心区域的方法,其特征在于,完成二值化手掌图像中心区域确定后,将自然光-近红外组合光源手掌图像与二值化手掌图像旋转相同角度,在旋转后的自然光-近红外组合光源手掌图像中与二值化手掌图像中心区域对应位置截取相应大小的矩形图像,即得自然光-近红外组合光源手掌图像的手掌图像中心区域。
技术总结
本发明提供一种确定手掌图像中心区域的方法,包括采用自然光-近红外光组合光源手掌图像与自然光光源手掌图像的差值图像进行阈值化处理,结合得到的角点采用聚类法获得五根手指之间的四个指根凹点,再对四个指根凹点进行定位,根据定位结果得到手掌区域中心线和中心点,最终根据指根凹点和手掌区域中心点对手掌图像中心区域进行确定。本发明的确定方法得到的矩形中心区域是通过手掌大小自适应计算出来的,具有较强的自适应性和鲁棒性,确定结果准确率高。果准确率高。果准确率高。
技术研发人员:徐晨 陶志刚
受保护的技术使用者:宁波芯然科技有限公司
技术研发日:2021.11.19
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。