技术特征:
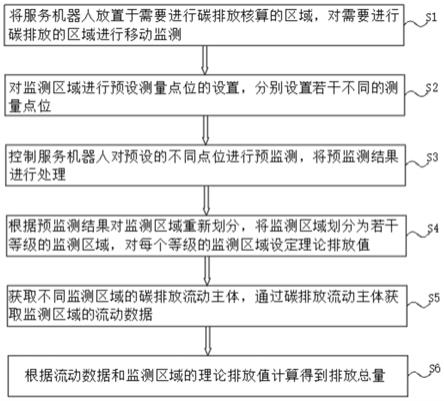
1.一种服务机器人碳排放核算方法,其特征在于,所述核算方法包括如下步骤:步骤s1,将服务机器人放置于需要进行碳排放核算的区域,对需要进行碳排放核算的区域进行移动监测;步骤s2,对监测区域分别预设若干不同的测量点位;步骤s3,控制所述服务机器人对预设的不同测量点位进行预监测;步骤s4,根据预监测结果,将监测区域重新划分为若干等级的监测区域,并对每个等级的监测区域设定理论排放值;步骤s5,获取不同监测区域的碳排放流动主体,通过碳排放流动主体获取每个监测区域的流动数据;步骤s6,根据每个监测区域的流动数据和理论排放值,计算得到排放总量。2.根据权利要求1所述的服务机器人碳排放核算方法,其特征在于,所述步骤s1还包括步骤s11,所述步骤s11包括:将需要监测的区域进行划定,获取划定后的监测区域的轮廓图,控制服务机器人沿监测区域轮廓的外围逐步向监测区域的中心位置进行移动监测。3.根据权利要求2所述的服务机器人碳排放核算方法,其特征在于,所述步骤s2还包括步骤s21,所述步骤s21包括:对监测区域进行可活动区域划分,可活动区域为服务机器人能够通行的路面区域,在路面区域上,每间隔第一距离划定一个监测点,并对监测点依次标记为jc1、jc2
…
jci,其中,jc为监测点的代表符号,1至i为每个监测点的代表序号,jc1至jci依次为第一监测点至第i监测点。4.根据权利要求3所述的服务机器人碳排放核算方法,其特征在于,所述步骤s3还包括步骤s31,所述步骤s31包括:控制服务机器人对每个监测点进行监测;先对每个监测点进行短时间监测,对每个监测点监测第一时长,获取第一时长下每个监测点的碳排放量,并依次标记为t1jc1、t1jc2...t1jci,其中t1为第一时长的代表符号,t1jc1至t1jci依次分别为第一监测点在第一时长下的碳排放量至第i监测点在第一时长下的碳排放量;再对每个监测点进行长时间监测,对每个监测点监测第二时长,获取第二时长下每个监测点的碳排放量,并依次标记为t2jc1、t2jc2
…
t2jci,其中t2为第一时长的代表符号,t2jc1至t2jci依次分别为第一监测点在第二时长下的碳排放量至第i监测点在第二时长下的碳排放量。5.根据权利要求4所述的服务机器人碳排放核算方法,其特征在于,所述步骤s4还包括步骤s41,所述步骤s41包括:将每个监测点在第一时长和第二时长下的碳排放量分别代入到碳排放标准公式中求得每个监测点的碳排放标准值;当该监测点的碳排放标准值大于等于第一排放阈值时,将该监测点标记为第一等级排放点;当该监测点的碳排放标准值大于等于第二排放阈值且小于所述第一排放阈值时,将该监测点标记为第二等级排放点;当该监测点的碳排放标准值小于所述第二排放阈值时,将该监测点标记为第三等级排放点。6.根据权利要求5所述的服务机器人碳排放核算方法,其特征在于,所述碳排放标准公式配置为:tpb=a1
×
t1jc a2
×
t2jc;其中,tpb为碳排放标准值,t1jc为第一时长下不同监
测点的碳排放量代表符号,t2jc为第二时长下不同监测点的碳排放量代表符号,a1为第一时长的碳排放转换系数,a2为第二时长的碳排放转换系数,且a1和a2均大于零。7.根据权利要求6所述的服务机器人碳排放核算方法,其特征在于,所述步骤s5还包括步骤s51,所述步骤s51包括:对不同监测点的流动碳排放进行监测,获取流动排放主体的类型以及不同类型流动排放主体的碳排放标准值;将不同类型的流动排放主体依次划分为第一等级碳排放主体、第二等级碳排放主体以及第三等级碳排放主体;所述第一等级碳排放主体的碳排放标准值设定为第一等级标准值,所述第二等级碳排放主体的碳排放标准值设定为第二等级标准值,所述第三等级碳排放主体的碳排放标准设定为第三等级标准值。8.根据权利要求7所述的服务机器人碳排放核算方法,其特征在于,所述步骤s5还包括步骤s52,所述步骤s52包括:将不同监测点的流动排放主体的碳排放标准值分别代入流动主体碳排放公式中,求得每个监测点的流动碳排放值。9.根据权利要求8所述的服务机器人碳排放核算方法,其特征在于,所述流动主体碳排放公式配置为:tpld=k1
×
(b1
×
pbz1 b2
×
pbz2 b3
×
pbz3);其中tpld为流动碳排放值,pbz1为第一等级标准值,pbz2为第二等级标准值,pbz3为第三等级标准值,b1为第一等级标准的转换系数,b2为第二等级标准的转换系数,b3为第三等级标准的转换系数,k1为流动转化系数,且b1、b2、b3和k1均大于零。10.根据权利要求9所述的服务机器人碳排放核算方法,其特征在于,将每个监测点的流动排放主体的碳排放标准值和流动碳排放值代入监测区域碳排放公式中,求得碳排放总值;所述监测区域碳排放公式配置为:tpjcz=α
×
(tpb1 ... tpbi) β
×
(tpld1 ... tpldi);其中tpjcz为碳排放总值,tpb1至tpbi依次为第一监测点至第i监测点的碳排放标准值,tpld1至tpldi依次为第一监测点至第i监测点的流动碳排放值,α为标准转换比,β为流动转换比,且α和β均大于零。
技术总结
本发明公开了一种服务机器人碳排放核算方法,包括如下步骤:将服务机器人放置于需要进行碳排放核算的区域,对需要进行碳排放核算的区域进行移动监测;对监测区域分别预设若干不同的测量点位;控制服务机器人对预设的不同测量点位进行预监测;根据预监测结果将监测区域重新划分为若干等级的监测区域,对每个等级的监测区域设定理论排放值;获取不同监测区域的碳排放流动主体的流动数据;根据每个监测区域的流动数据和理论排放值,计算得到排放总量;本发明能够对不同碳排放区域进行有针对性的监测获取,从而提高不同监测区域的碳排放监测准确性,以解决现有的碳排放监测不够有针对性,且监测方式较为单一,监测不够准确的问题。监测不够准确的问题。监测不够准确的问题。
技术研发人员:彭渌 刘念 邓资银
受保护的技术使用者:特斯联科技集团有限公司
技术研发日:2021.12.09
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。