技术特征:
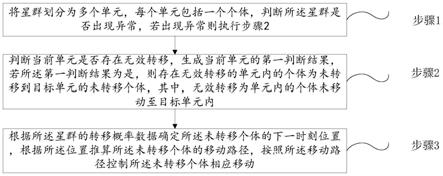
1.一种大规模星群构型控制方法,其特征在于,包括:步骤1,将星群划分为多个单元,每个单元包括一个个体,判断所述星群是否出现异常,若出现异常则执行步骤2;步骤2,判断当前单元是否存在无效转移,生成当前单元的第一判断结果,若所述第一判断结果为是,则存在无效转移的单元内的个体为未转移到目标单元的未转移个体,其中,无效转移为单元内的个体未移动至目标单元内;步骤3,根据所述星群的转移概率数据确定所述未转移个体的下一时刻位置,根据所述位置推算所述未转移个体的移动路径,按照所述移动路径控制所述未转移个体相应移动。2.根据权利要求1所述的一种大规模星群构型控制方法,其特征在于,在所述控制所述未转移个体相应移动后,还包括:重复步骤步骤2和步骤3,直到所述当前单元不存在无效转移后,判断下一个单元,当所有单元均不存在无效转移后,重复步骤1,直至所述星群不存在异常。3.根据权利要求1所述的一种大规模星群构型控制方法,其特征在于,判断所述星群是否出现异常通过以下过程完成:基于误差函数,计算所述星群的实时密度分布与所述星群的期望密度分布的误差值,若所述误差值小于第一阈值,则判定所述星群未出现异常,反之则判定所述星群出现异常。4.根据权利要求3所述的一种大规模星群构型控制方法,其特征在于,步骤3具体为:步骤301,基于所述星群的转移概率数据确定计算未转移个体的概率转移矩阵p,其中,所述星群的转移概率数据包括:所述第一判断结果以及所述误差值;步骤302,根据所述未转移个体的概率转移矩阵p,确定所述未转移个体的下一时刻的位置;步骤303,对所述未转移个体当前所在单元以及所述位置进行分割,得到分割后的边界几何信息,根据所述边界几何信息确定所述未转移个体的移动路径,按照所述移动路径控制所述未转移个体相应移动,并根据所述移动路径更新所述未转移个体的位置信息。5.根据权利要求4所述的一种大规模星群构型控制方法,其特征在于,步骤步骤301具体为:当所述第一判断结果为是时,判断相邻单元内是否有所述目标单元,生成每个单元的第二判断结果,其中,相邻单元为个体每个时刻最远转移位置的集合;当所述第二判断结果为是时,此时未转移个体的概率转移矩阵p与所述相邻单元内的所述目标单元的数量成反比;当所述第二判断结果为否时,此时未转移个体的概率转移矩阵p与相邻过渡单元的数量成反比,其中,所述相邻过渡单元为连接所述目标单元以及当前所在单元的单元;当所述第一判断结果为否时,此时判断n个单元的实时密度值是否在预设密度值范围内,生成每个单元的第三判断结果;当所述第三判断结果为是时,且所述误差值不大于所述第一阈值时,此时未转移个体的概率转移矩阵p等于单位阵;当所述第三判断结果为否时,基于优化后的马尔科夫矩阵m,对此时的未转移个体的概率转移矩阵p进行计算,计算公式如下:
其中,其中,ε
c
为自定义的正常数,ε
m
为时变参数,其中为目标单元的总数量,c
k,max
为成本约束矩阵c
k
中元素最大值,c
k,max
=max
i,i
c
k
[i,l],c
k
[i,l]为成本约束矩阵中的元素,为误差函数,为概率转移矩阵p的对角线元素,为概率转移矩阵p的除对角线外的其他元素,其中,对角线外的其他元素,其中,为马尔科夫矩阵m的对角线元素,为马尔科夫矩阵m的除对角线外的其他元素,θ[l]为第l个单元的期望密度分布值,k为时刻,i,j,l为正整数变量,θ[i]为第i个单元的期望密度分布值,为第i个单元的时变密度分布值,θ[i]与中的i为k时刻个体j所处的单元,n
bin
为所有单元的个数;其中,d
h
为海林格距离函数,可有效降低无效转移的发生概率,τ
j
及β
j
为可自定义的时变正常数,θ为所有单元的期望密度分布向量,为所有单元的时变密度分布函数。6.根据权利要求4所述的一种大规模星群构型控制方法,其特征在于,步骤步骤302具体为:对所述未转移个体的概率转移矩阵p进行轮盘赌算法,根据计算结果确定所述未转移个体的下一时刻的相邻单元。7.根据权利要求4所述的一种大规模星群构型控制方法,其特征在于,步骤步骤303具体为:通过voronoi方法对所述未转移个体当前所在单元以及所述下一时刻的相邻单元进行分割,得到分割后的多个第一多边形,在每个所述第一多边形内部进行相似多边形分割,使得每个所述第一多边形内包含一个与所述第一多边形相似且满足第一条件的第二多边形,基于预设转移运动约束条件,确定所述未转移个体的移动路径,并根据所述移动路径更新所述未转移个体的位置信息,所述第一条件包括:所述第二多边形形成的区域与所述第一多边形的边界间距为第二阈值。8.一种大规模星群构型控制系统,其特征在于,包括:
划分模块,用于将星群划分为多个单元,每个单元包括一个个体,判断所述星群是否出现异常,若出现异常则执行判断模块;判断模块,用于判断当前单元是否存在无效转移,生成单前单元的第一判断结果,若所述第一判断结果为是,则存在无效转移的单元内的个体为未转移到目标单元的未转移个体,其中,无效转移为单元内的个体未移动至目标单元内;移动模块,用于根据所述星群的转移概率数据确定所述未转移个体的下一时刻位置,根据所述位置推算所述未转移个体的移动路径,按照所述移动路径控制所述未转移个体相应移动。9.一种存储介质,其特征在于,所述存储介质中存储有指令,当计算机读取所述指令时,使所述计算机执行如权利要求1至4中任一项所述的一种大规模星群构型控制方法。10.一种电子设备,其特征在于,包括权利要求9所述的存储介质、执行所述存储介质内的指令的处理器。
技术总结
本发明涉及星群控制领域,尤其涉及大规模星群构型控制方法、系统、存储介质及电子设备。该方法包括:步骤1,将星群划分为多个单元,每个单元包括一个个体,判断星群是否出现异常,若出现异常则执行步骤2;步骤2,判断当前单元是否存在无效转移,生成当前单元的第一判断结果,若第一判断结果为是,则存在无效转移的单元内的个体为未转移到目标单元的未转移个体,其中,无效转移为单元内的个体未移动至目标单元内;步骤3,根据星群的转移概率数据确定未转移个体的下一时刻位置,根据位置推算未转移个体的移动路径,按照移动路径控制未转移个体相应移动。本发明能够达到移动轨迹较为灵活且轨迹避撞的效果。迹避撞的效果。迹避撞的效果。
技术研发人员:张皓 陈琳 张晨 付伟达 朱政帆 汪忠辉 韦楠
受保护的技术使用者:航天东方红卫星有限公司
技术研发日:2021.12.20
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。