技术特征:
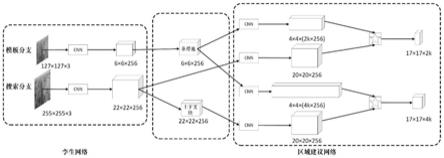
1.一种用于无人机目标跟踪的孪生区域建议网络模型,其特征在于:包括模板分支单元和搜索分支单元,所述模板分支单元包括第一卷积模块、条带池化模块、第二卷积模块、第三卷积模块、第一匹配模块和第一输出模块,所述搜索分支单元包括第四卷积模块、全局上下文网络模块、第五卷积模块、第六卷积模块、第二匹配模块和第二输出模块;所述第一卷积模块和第四卷积模块构成孪生网络,第一卷积模块与条带池化模块连接,第四卷积模块与全局上下文网络模块连接;所述第二卷积模块、第三卷积模块、第一匹配模块、第一输出模块、第五卷积模块、第六卷积模块、第二匹配模块和第二输出模块构成区域建议网络,第二卷积模块、第三卷积模块均与第一匹配模块连接,第一匹配模块与第一输出模块连接;第五卷积模块、第六卷积模块均与第二匹配模块连接,第二匹配模块与第二输出模块连接;其中,条带池化模块分别与第二卷积模块和第五卷积模块连接,第四卷积模块与第三卷积模块连接,全局上下文网络模块与第六卷积模块连接。2.根据权利要求1所述的用于无人机目标跟踪的孪生区域建议网络模型,其特征在于:所述模板分支单元输入图像大小为127
×
127
×
3,所述搜索分支单元输入图像大小为255
×
255
×
3。3.根据权利要求1所述的用于无人机目标跟踪的孪生区域建议网络模型,其特征在于:网络模型中采用距离交并比计算边界框。4.根据权利要求3所述的用于无人机目标跟踪的孪生区域建议网络模型,其特征在于:所述区域建议网络中分类的损失函数采用交叉熵损失函数,回归的损失函数为l1范数损失函数。
技术总结
本发明公开了一种用于无人机目标跟踪的孪生区域建议网络模型,该网路模型在SiamRPN网络的基础上加入条带池化模块和全局上下文网络模块,使网络解决远程依赖问题,有效理解不同的跟踪场景;然后优化交并比的计算方法,完成目标的特征提取,回归精准的预测框;本发明在光照变化、背景干扰以及目标快速移动的情况下有较强的鲁棒性,在UAV123公开数据集基准上进行测试,跟踪速度约为106帧/秒,获得0.754的准确率和0.542的成功率,尤其是在背景干扰环境下,精确率和成功率分别提升了8.29%和11.63%。11.63%。11.63%。
技术研发人员:杨帅东 赵书朵 陈云生
受保护的技术使用者:西南石油大学
技术研发日:2021.12.31
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。