技术特征:
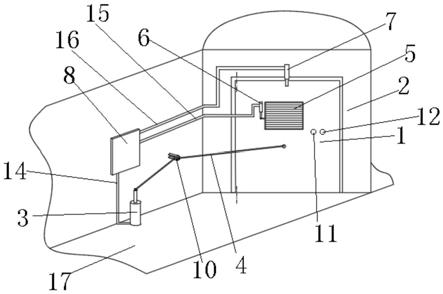
1.一种盾构机刀盘检修移动机器人,其特征在于,包括:两个走行部(1),所述走行部(1)内设置电永磁体组,所述电永磁体组将所述走行部(1)吸附于盾构机垂直墙板上;伸缩部(2),所述伸缩部(2)的两端分别铰接一个所述走行部(1);设备安装台(3),设置两个所述走行部(1)的上方,一走行部(1)与所述设备安装台(3)固定连接,另一走行部(1)与设备安装台(3)滑动连接,所述设备安装台(3)的长度等于所述伸缩部(2)的最大伸缩长度;控制部(4),信号连接于所述电永磁体组、伸缩部(2)。2.根据权利要求1所述的盾构机刀盘检修移动机器人,其特征在于:所述走行部(1)为一具有空腔的矩形体(4),所述电永磁体组设置在所述矩形体(4)的空腔内,所述电永磁体组的上方设置有隔板(12),所述伸缩安装座(13)设置在所述隔板(12)上。3.根据权利要求2所述的盾构机刀盘检修移动机器人,其特征在于:所述伸缩安装座(13)设置有两个,两个伸缩安装座(13)间隔且平行的设置,所述伸缩部(2)设置有两个,两个伸缩部(2)分别与所述伸缩安装座(13)铰接。4.根据权利要求3所述的盾构机刀盘检修移动机器人,其特征在于:与所述设备安装台(3)滑动连接的走行部(1)设置有导向承载结构(31),所述导向承载结构(31)包括支撑柱(311)和轴承(312),所述支撑柱(311)设置在所述隔板(12)上,所述轴承(312)设置在所述支撑柱(311)的上端,所述设备安装台(3)设置在与所述走行部(1)接触的一面设置有导轨(6),所述轴承(312)与所述导轨(6)转动摩擦以引导所述设备安装座的运动路径,所述导轨(6)与轴承312接触的面上有间隔设置的弹性垫片,弹性垫片上设置有导轨安装板(61)。5.根据权利要求4所述的盾构机刀盘检修移动机器人,其特征在于:所述导向承载结构(31)设置有两个,两个导向承载结构(31)的连线与所述两个伸缩安装座(13)的连线垂直。6.根据权利要求1所述的盾构机刀盘检修移动机器人,其特征在于:所述两个走行部(1)相对的一面还设置有锁紧结构,所述锁紧结构包括第一锁紧块(14)和第二锁紧块(15),所述第一锁紧块(14)设置在一个走行部(1)上,第二锁紧块(15)设置在另一个走行部(1)上。7.根据权利要求6所述的盾构机刀盘检修移动机器人,其特征在于:所述第一锁紧块(14)朝向第二锁紧块(15)方向设置有凸起,所述凸起由朝向第二锁紧块(15)方向向背离第二锁紧块(15)方向宽度增大,所述第二锁紧块(15)朝向第一锁紧块(14)方向设置有凹槽,所述凹槽与所述凸起的形状配适。8.根据权利要求1所述的盾构机刀盘检修移动机器人,其特征在于:所述走行部(1)的底面上设置有向上的凹陷,所述凹陷内设置有导轮结构(15),所述导轮结构(15)包括导轮。9.根据权利要求8所述的盾构机刀盘检修移动机器人,其特征在于:所述导轮结构(15)还包括支架,所述支架设置有两个平行的支撑板,两个所述支撑板上设置有弹性板,所述弹性板设置在所述凹陷内。10.根据权利要求1所述的盾构机刀盘检修移动机器人,其特征在于:所述控制部(4)信号连接有用于检测走行部(1)行进线路的传感器,所述传感器设置在所述设备安装台(3)上。
技术总结
本发明提供了一种盾构机刀盘检修移动机器人,涉及移动机器人,包括:两个走行部,所述走行部内设置电永磁体组,所述电永磁体组将所述走行部吸附于盾构机垂直墙板上;伸缩部,所述伸缩部的两端分别铰接一个所述走行部;设备安装台,设置两个所述走行部的上方,一走行部与所述设备安装台固定连接,另一走行部与设备安装台滑动连接,所述设备安装台的长度等于所述伸缩部的最大伸缩长度;控制部,信号连接于所述电永磁体组、伸缩部,本申请采用伸缩部作为驱动,利用电永磁体组吸附在垂直墙板上,伸缩部伸缩的同时改变走行部与垂直墙板的磁力,实现两个走行部靠近、远离,进而实现带动走行部上的设备安装台移动的目的。部上的设备安装台移动的目的。部上的设备安装台移动的目的。
技术研发人员:刘剑 刘彬 陈世华 江凌 李燕平 符建光
受保护的技术使用者:湖南海润电气有限公司
技术研发日:2021.12.27
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。