技术特征:
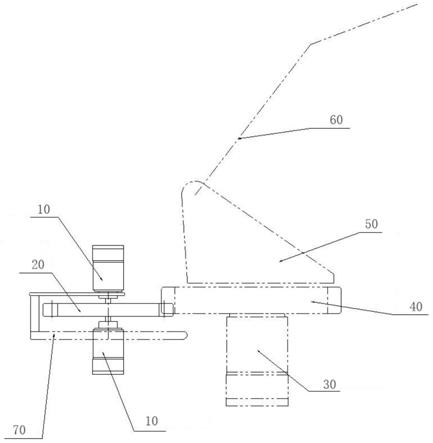
1.一种控制臂架的回转编码器系统,其特征在于,所述控制臂架的回转编码器系统包括:回转驱动机构,用于驱动所述臂架(60)回转;编码器齿轮(20),可回转地安装于所述回转驱动机构上;至少两个回转编码器(10),分别安装于所述编码器齿轮(20)的两侧,所述回转编码器(10)用于检测所述臂架(60)的回转角度并控制所述回转驱动机构工作;和控制单元,与所述回转编码器(10)电连接并被配置为:实时采集多个所述回转编码器(10)接收的回转角度数据;比较多个所述回转编码器(10)采集的回转角度数据,根据对比结果选择正常的所述回转编码器(10)控制所述臂架(60)动作。2.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述回转编码器(10)同侧安装于所述编码器齿轮(20)上。3.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述回转编码器(10)的数量为两个且同轴对称布置于所述编码器齿轮(20)的两侧。4.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述回转编码器(10)的数量为两个且位于所述编码器齿轮(20)的两侧,且两个所述回转编码器(10)沿中心轴线错开布置。5.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述回转编码器(10)包括回转输出轴(21),所述回转输出轴(21)插接于所述编码器齿轮(20)内。6.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述编码器齿轮(20)的中部形成安装孔,所述安装孔的内侧壁沿周向设置有轴套(22),所述回转输出轴(21)插接于所述轴套(22)内,所述回转输出轴(21)的外侧壁和所述轴套(22)的内侧壁密封配合。7.根据权利要求1所述的控制臂架的回转编码器系统,其特征在于,所述回转编码器(10)的数量为两个,所述控制单元进一步被配置为:获取两个所述回转编码器(10)的回转角度差值,比对所述回转角度差值和预设差值;当回转角度差值小于预设差值时,则控制两个所述回转编码器(10)同时工作;当回转角度差值大于或等于预设差值时,则根据所述回转编码器(10)的工作情况切换所述回转编码器(10)。8.根据权利要求1至7中任意一项所述的控制臂架的回转编码器系统,其特征在于,所述回转驱动机构包括回转齿轮(40)和用于驱动所述回转齿轮(40)旋转的回转减速机(30),所述回转减速机(30)与所述回转编码器(10)电连接,所述回转齿轮(40)的外周与所述编码器齿轮(20)的外周啮合。9.根据权利要求8所述的控制臂架的回转编码器系统,其特征在于,所述控制单元进一步被配置为:当回转角度差值大于或等于预设差值时,判断是否有正常的所述回转编码器(10);若是,则选择正常的所述回转编码器(10)控制所述回转减速机(30)工作;若否,则停止臂架(60)动作。10.根据权利要求8所述的控制臂架的回转编码器系统,其特征在于,所述回转齿轮
(40)上设置有转台(50),所述臂架(60)安装于所述转台(50)上。11.一种工程机械,其特征在于,所述工程机械包括如权利要求1至10中任意一项所述的控制臂架的回转编码器系统。12.根据权利要11所述的工程机械,其特征在于,所述工程机械包括底架(70),所述回转编码器(10)的外周设置有盒体(90),所述盒体(90)通过紧固件可拆卸连接于所述底架(70)上。13.根据权利要11所述的工程机械,其特征在于,所述回转编码器(10)与所述底架(70)接触的位置处设置有保护垫圈(80)。
技术总结
本发明提供一种控制臂架的回转编码器系统及工程机械,该控制臂架的回转编码器系统包括回转驱动机构、编码器齿轮、至少两个回转编码器以及控制单元;回转驱动机构用于驱动臂架回转;编码器齿轮可回转地安装于回转驱动机构的一侧;至少两个回转编码器分别安装于编码器齿轮的两侧,回转编码器用于检测臂架的回转角度并控制回转驱动机构工作;控制单元与回转编码器电连接并用于实时采集多个回转编码器采集的回转角度数据;然后比较多个回转编码器采集的回转角度数据,根据对比结果选择回转编码器控制臂架动作。本发明通过对比两个回转编码器所采集的回转角度数据进行回转编码器的使用选择,与安装单个回转编码器的系统相比,容错率更高更安全。错率更高更安全。错率更高更安全。
技术研发人员:禹源 蒋旭 冯赫
受保护的技术使用者:湖南中联重科应急装备有限公司
技术研发日:2021.12.30
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。