技术特征:
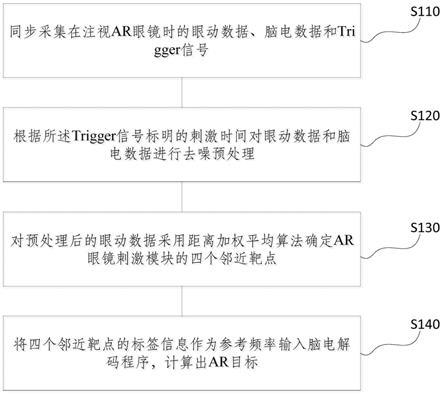
1.一种用于ar目标识别的脑电和眼动融合方法,其特征在于,包括以下步骤:同步采集在注视ar眼镜时的眼动数据、脑电数据和trigger信号;根据所述trigger信号标明的刺激时间对眼动数据和脑电数据进行去噪预处理;对预处理后的眼动数据采用距离加权平均算法确定ar眼镜刺激模块的四个邻近靶点;将四个邻近靶点的标签信息作为参考频率输入脑电解码程序,计算出ar目标。2.如权利要求1所述的脑电和眼动融合方法,其特征在于,对预处理后的眼动数据采用距离加权平均算法确定ar眼镜刺激模块的四个邻近靶点包括:将预处理后的眼动数据,按照3秒刺激时间先后顺序将眼动数据等距分割成3组眼动子数据,分别计算3组眼动子数据的平均坐标(x1,y1)、(x2,y2)、(x3,y3);对3组眼动子数据的平均坐标按照预定加权比例计算加权平均坐标(x
m
,y
m
);计算所述加权平均坐标(x
m
,y
m
)与ar眼镜每个刺激模块的中心坐标(x
i
,y
i
)之间的距离dw;利用matlab中sort函数对计算出的每个距离dw按照从小到大排序得出距离ds1、ds2、ds3、ds4;将距离ds1、ds2、ds3、ds4对应的四个靶点确定为所述四个邻近靶点。3.如权利要求2所述的脑电和眼动融合方法,其特征在于,第1组眼动子数据平均坐标的权重比例为10%,第2组眼动子数据平均坐标的权重比例为20%,第3组眼动子数据平均坐标的权重比例为70%。4.如权利要求3所述的脑电和眼动融合方法,其特征在于,对3组眼动子数据的平均坐标按照预定加权比例计算加权平均坐标(x
m
,y
m
)的计算公式为:(x
m
,y
m
)=10%
×
(x1,y1) 20%
×
(x2,y2) 70%
×
(x3,y3)。5.一种用于ar目标识别的脑电和眼动融合装置,其特征在于,包括:采集模块,用于同步采集在注视ar眼镜时的眼动数据、脑电数据和trigger信号;预处理模块,用于根据所述trigger信号标明的刺激时间对眼动数据和脑电数据进行去噪预处理;筛选模块,用于对预处理后的眼动数据采用距离加权平均算法确定ar眼镜刺激模块的四个邻近靶点;识别模块,用于将四个邻近靶点的标签信息作为参考频率输入脑电解码程序,计算出ar目标。6.如权利要求5所述的脑电和眼动融合装置,其特征在于,所述筛选模块包括:分割子模块,用于将预处理后的眼动数据,按照3秒刺激时间先后顺序将眼动数据等距分割成3组眼动子数据,分别计算3组眼动子数据的平均坐标(x1,y1)、(x2,y2)、(x3,y3)坐标计算子模块,用于对3组眼动子数据的平均坐标按照预定加权比例计算加权平均坐标(x
m
,y
m
);距离计算子模块,用于计算所述加权平均坐标(x
m
,y
m
)与ar眼镜每个刺激模块的中心坐标(x
i
,y
i
)之间的距离dw;排序子模块,利用matlab中sort函数对计算出的每个距离dw按照从小到大排序得出距离ds1、ds2、ds3、ds4;确定子模块,用于将距离ds1、ds2、ds3、ds4对应的四个靶点确定为所述四个邻近靶点。
7.一种电子设备,包括:一个或多个处理器;以及存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现根据权利要求1~4中任意一项所述的融合方法。8.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现根据权利要求1~4中任意一项所述的融合方法。
技术总结
本发明公开了用于AR目标识别的脑电和眼动融合方法、介质及设备,该方法包括同步采集在注视AR眼镜时的眼动数据、脑电数据和Trigger信号;根据所述Trigger信号标明的刺激时间对眼动数据和脑电数据进行去噪预处理;对预处理后的眼动数据采用距离加权平均算法确定AR眼镜刺激模块的四个邻近靶点;将四个邻近靶点的标签信息作为参考频率输入脑电解码程序,计算出AR目标。本发明降低了脑电融合计算量,解决了AR设备下脑电和眼动融合的需求,并且降低了现有融合算法带来的高占用、高计算量、和不稳定输出等问题,提高了识别效率和准确率。确率。确率。
技术研发人员:秦昌宇 代峥 陈远方
受保护的技术使用者:北京机械设备研究所
技术研发日:2021.11.29
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。