技术特征:
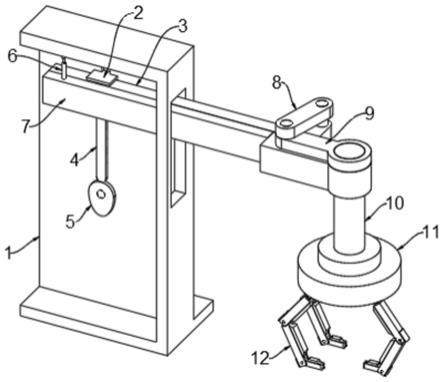
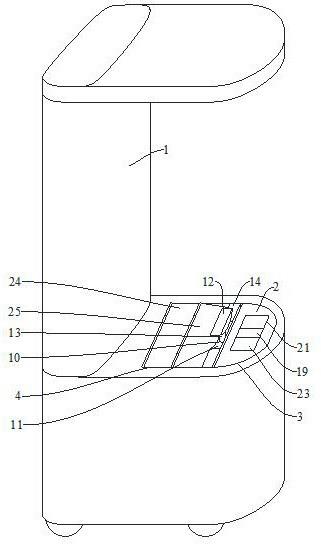
1.一种工业用智能机器人仿生机械手抓取设备,包括支撑架(1),其特征在于,所述支撑架(1)的侧壁设置有可上下滑动的u型固定座(2),所述支撑架(1)上设置有用于驱动固定座(2)上下移动的高度调节机构,所述固定座(2)上固定设置有水平分布的导轨(3),所述导轨(3)上设置有沿其长度方向滑动的活动板(7),且所述支撑架(1)的顶端设置有用于驱动活动板(7)横向移动的驱动机构,所述活动板(7)的端部转动连接有竖直设置的转动轴(10),所述转动轴(10)的底部设置有固定壳(11),所述固定壳(11)的底部设置有抓取机构(12),且所述导轨(3)的端部设置有用于驱动转动轴(10)进行90
°
旋转的连杆机构;所述抓取机构(12)包括三个结构相同的手指机构,三个所述手指机构呈等边三角形结构分布于固定壳(11)的底部;所述手指机构包括近指节(15)、中指节(16)及远指节(17),所述近指节(15)的顶端转动连接有连接座(14),所述连接座(14)的顶端固定于固定壳(11)的底部,所述近指节(15)的底部转动连接有中指节(16),所述中指节(16)的底部转动连接有远指节(17),所述固定壳(11)内设置有用于驱动近指节(15)、中指节(16)及远指节(17)活动的拉动机构。2.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述高度调节机构包括安装于支撑架(1)侧壁上的电机,所述电机轴部连接有凸轮(5),所述固定座(2)的底部设置有竖直分布的顶杆(4),所述顶杆(4)的底部与凸轮(5)的顶端边侧接触,且所述顶杆(4)的底部与凸轮(5)的边侧滑动连接。3.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述支撑架(1)的侧壁设置有竖直分布的滑槽,所述固定座(2)的侧壁设置有与滑槽滑动连接的滑块。4.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述驱动机构包括固定于支撑架(1)顶端的气缸(13),所述气缸(13)与导轨(3)平行分布,且所述气缸(13)的端部通过固定块连接有竖直分布的伸缩杆(6),所述伸缩杆(6)的底部与活动板(7)的顶端固定连接。5.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述导轨(3)的侧壁沿其长度方向设置有t型槽,所述活动板(7)的侧壁设置有与t型槽滑动连接的t型板。6.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述连杆机构包括第一连杆(8)及第二连杆(9),所述第一连杆(8)的一端通过转轴与导轨(3)的端部顶端转动连接,另一端通过转轴与第二连杆(9)的端部转动连接,所述第二连杆(9)的端部固定套设于转动轴(10)的顶端,且所述第一连杆(8)与第二连杆(9)之间呈90
°
分布。7.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述拉动机构包括设置于固定壳(11)内腔的电机,所述电机的轴部连接有收卷轮,所述收卷轮上套设有柔性绳索(20),所述柔性绳索(20)的端部延伸至固定壳(11)的下方,所述近指节(15)、中指节(16)及远指节(17)的内壁均设置有指盖(19),所述指盖(19)内的中间部位沿其长度方向设置有贯穿的通孔,所述柔性绳索(20)依次穿过近指节(15)、中指节(16)及远指节(17)上指盖(19)的通孔,并与远指节(17)固定连接。8.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述近指节(15)与连接座(14)、近指节(15)与中指节(16)、及中指节(16)与远指节(17)之间
均通过销轴(18)转动连接,且所述销轴(18)上设置有扭簧,所述近指节(15)及中指节(16)上均设置有定滑轮(24)。9.根据权利要求8所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,所述近指节(15)及中指节(16)底部的背部均设置有限位盖(21),所述限位盖(21)内壁设置有第一限位开关(22),所述近指节(15)及中指节(16)内壁为销轴(18)处设置有第二限位开关(23)。10.根据权利要求1所述的一种工业用智能机器人仿生机械手抓取设备,其特征在于,每个所述手指机构上的第一限位开关(22)相互串联、第二限位开关(23)相互串联,且所述第一限位开关(22)及第二限位开关(23)均与第一手指机构上的电机电性连接。
技术总结
本发明公开了一种工业用智能机器人仿生机械手抓取设备,包括支撑架,所述支撑架的侧壁设置有可上下滑动的U型固定座,所述支撑架上设置有用于驱动固定座上下移动的高度调节机构,所述固定座上固定设置有水平分布的导轨,所述导轨上设置有沿其长度方向滑动的活动板,且所述支撑架的顶端设置有用于驱动活动板横向移动的驱动机构,本发明通过采用三个手指机构来仿生人的拇指、食指及中指,并在各个指节、及柔性绳索的配合下,不仅实现了各个指节的自由度,还大大提高了抓取的稳定性,可靠性高,适合社会广泛推广使用。适合社会广泛推广使用。适合社会广泛推广使用。
技术研发人员:王建彬 陈昌兴 谭啟韬
受保护的技术使用者:肇庆学院
技术研发日:2022.01.21
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。